KoopMotion: Learning Almost Divergence Free Koopman Flow Fields for Motion Planning
作者: Alice Kate Li, Thales C Silva, Victoria Edwards, Vijay Kumar, M. Ani Hsieh
分类: cs.RO, cs.AI, cs.LG
发布日期: 2025-09-11 (更新: 2025-11-12)
备注: Revised with link to code. Accepted to CoRL 2025 (Conference on Robot Learning). 15 pages 11 figures
🔗 代码/项目: PROJECT_PAGE | PROJECT_PAGE
💡 一句话要点
KoopMotion:学习近似无散度的Koopman流场用于运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 Koopman算子 流场 无散度 机器人 自主导航 从演示学习
📋 核心要点
- 现有基于Koopman算子的运动规划方法缺乏对轨迹收敛性和目标点收敛性的内在保证,限制了其在从演示学习中的应用。
- KoopMotion通过学习近似无散度的Koopman流场,将运动规划问题转化为动力系统建模,确保机器人能够平滑收敛到期望轨迹。
- 实验表明,KoopMotion在LASA数据集上仅需3%的数据即可生成密集运动规划,并在真实机器人实验中验证了其有效性。
📝 摘要(中文)
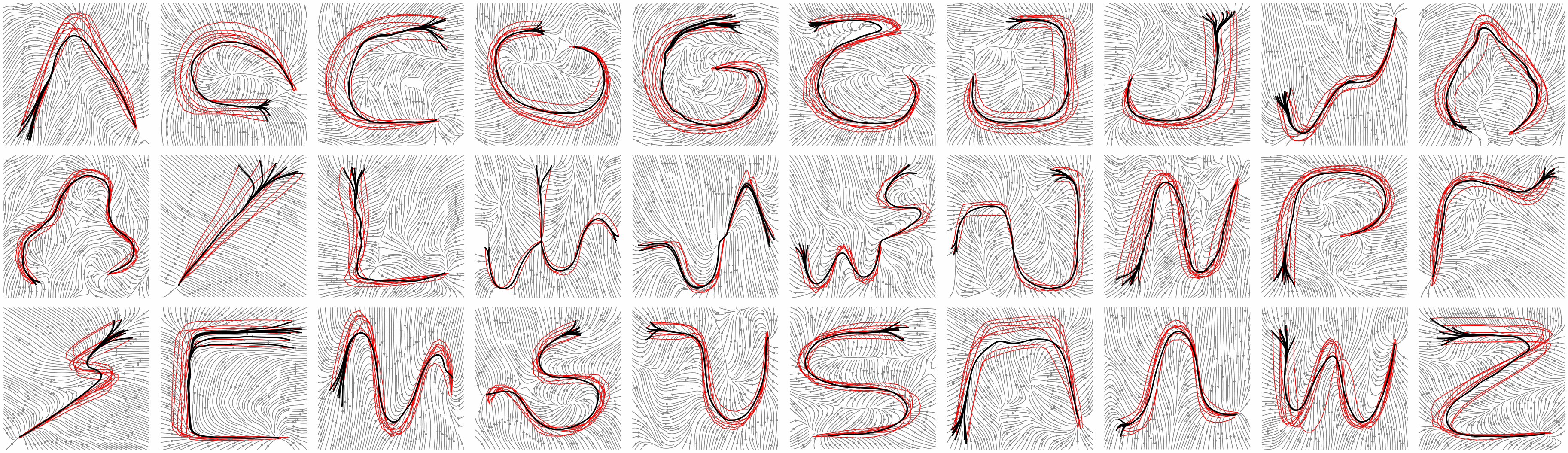
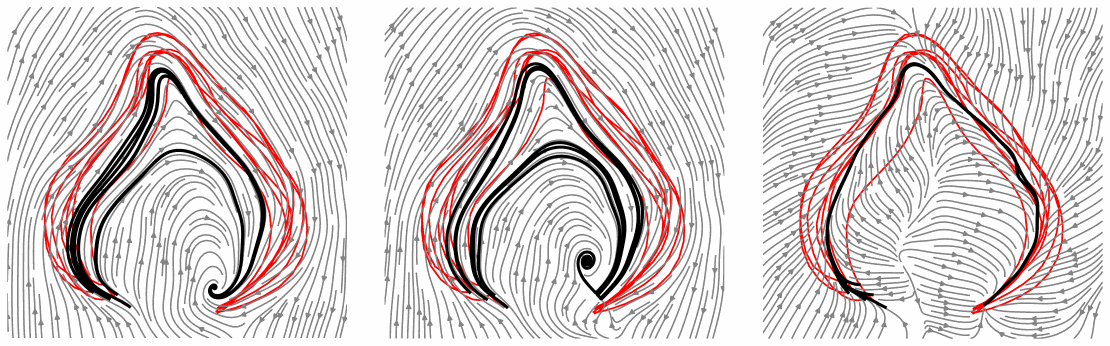
本文提出了一种新颖的基于流场的运动规划方法,该方法驱动机器人从任何初始状态到达期望的参考轨迹,并收敛到轨迹的终点。尽管Koopman算子理论在动力系统建模中表现出有效性,但Koopman算子本身并不能保证收敛到期望的轨迹或指定的目标——这是从演示中学习(LfD)的要求。我们提出了KoopMotion,它将运动流场表示为动力系统,并由Koopman算子参数化以模仿期望的轨迹,并利用学习到的流场的散度特性来获得平滑的运动场,当机器人偏离期望轨迹时,该运动场收敛到期望的参考轨迹,并跟踪轨迹直到终点。为了证明我们方法的有效性,我们展示了KoopMotion在LASA人类笔迹数据集和3D机械臂末端执行器轨迹数据集上的评估,包括频谱分析。我们还在一个物理机器人上进行了实验,验证了KoopMotion在一个非静态流体流动环境中运行的微型自主水面车辆上的性能。我们的方法在空间和时间上都具有很高的样本效率,仅需要LASA数据集的3%即可生成密集的运动计划。此外,在比较衡量空间和时间动力学建模有效性的指标时,KoopMotion比基线方法有了显着改进。
🔬 方法详解
问题定义:论文旨在解决运动规划中,如何利用Koopman算子学习高效且稳定的运动策略,特别是保证从任意初始状态收敛到期望轨迹的问题。现有方法通常难以同时保证轨迹跟踪的准确性和收敛性,尤其是在复杂或动态环境中。
核心思路:论文的核心在于将运动规划问题建模为学习一个近似无散度的Koopman流场。通过学习一个动力系统,使得机器人能够沿着该流场运动,最终收敛到期望的轨迹。无散度特性保证了运动的平滑性和稳定性。
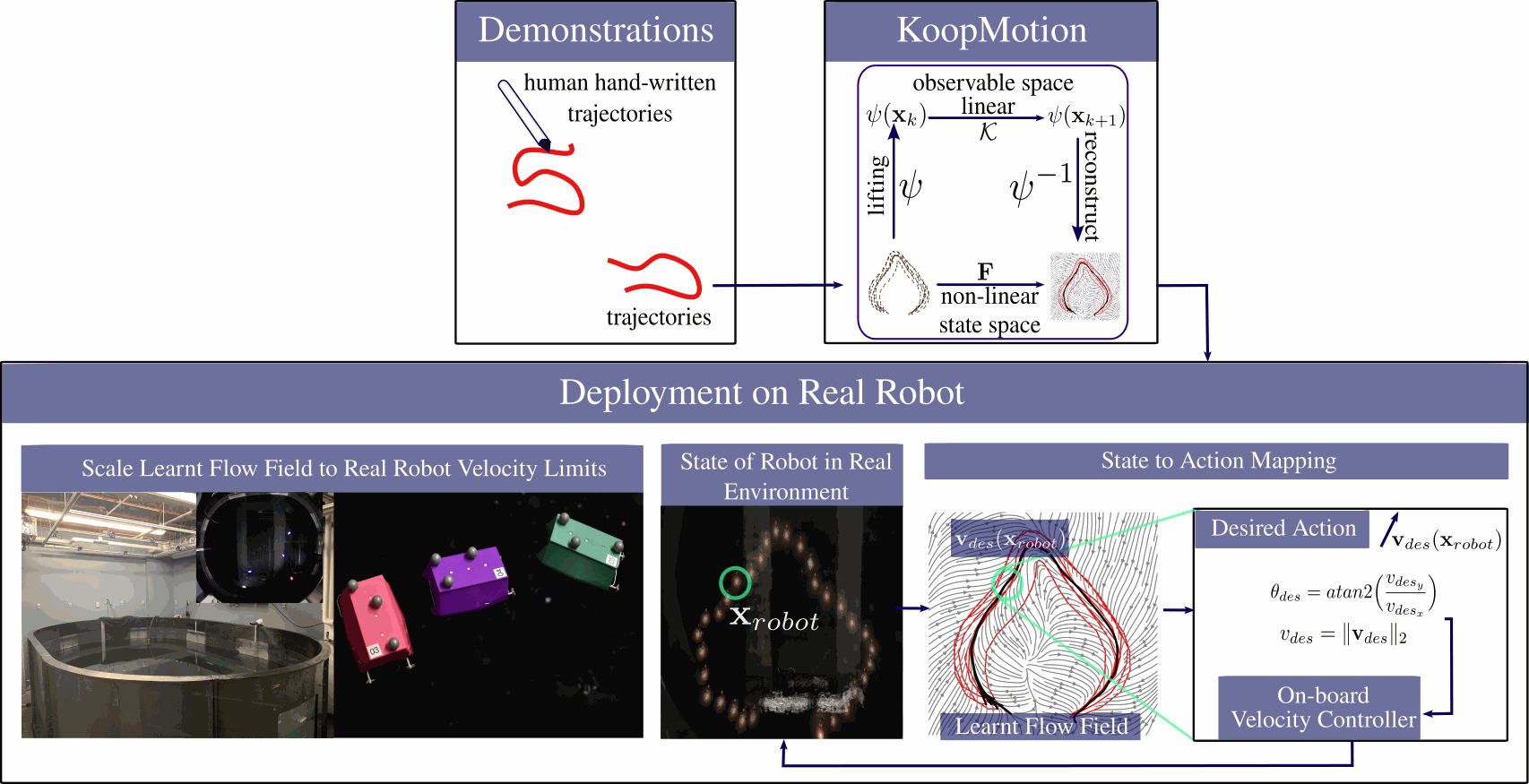
技术框架:KoopMotion的整体框架包括以下几个主要步骤:1) 从演示数据中学习Koopman算子,该算子描述了运动流场的动力学特性。2) 通过优化目标函数,约束学习到的流场具有近似无散度的性质。3) 利用学习到的流场进行运动规划,机器人根据当前状态沿着流场方向运动,直至到达目标轨迹。4) 在真实机器人上进行实验验证。
关键创新:该方法最重要的创新点在于将无散度约束引入到Koopman算子的学习过程中。传统的Koopman算子学习方法通常只关注对动力学系统的建模,而忽略了运动规划的稳定性要求。通过引入无散度约束,可以有效地提高运动规划的鲁棒性和收敛性。
关键设计:论文中关键的设计包括:1) 如何定义和计算流场的散度,并将其作为优化目标的一部分。2) 如何选择合适的Koopman算子的基函数,以保证学习到的流场能够有效地表示复杂的运动模式。3) 如何设计损失函数,平衡轨迹跟踪的准确性和流场的无散度性。4) 如何在真实机器人平台上实现该算法,并处理实际环境中的噪声和不确定性。
🖼️ 关键图片
📊 实验亮点
KoopMotion在LASA人类笔迹数据集上取得了显著的性能提升,仅使用3%的数据即可生成高质量的运动规划。在3D机械臂末端执行器轨迹数据集上的实验也验证了其有效性。此外,在真实机器人实验中,KoopMotion成功地控制了一个微型自主水面车辆在非静态流体流动环境中运行,证明了其在实际应用中的可行性。
🎯 应用场景
KoopMotion可应用于各种机器人运动规划场景,例如自主导航、机械臂控制、无人机编队等。其在动态环境中的鲁棒性和高效性使其特别适用于需要快速适应环境变化的场景,例如在拥挤的仓库中进行物体搬运,或是在复杂地形中进行搜索救援任务。该方法还可用于人机协作,通过学习人类的运动模式,实现更加自然和高效的人机交互。
📄 摘要(原文)
In this work, we propose a novel flow field-based motion planning method that drives a robot from any initial state to a desired reference trajectory such that it converges to the trajectory's end point. Despite demonstrated efficacy in using Koopman operator theory for modeling dynamical systems, Koopman does not inherently enforce convergence to desired trajectories nor to specified goals - a requirement when learning from demonstrations (LfD). We present KoopMotion which represents motion flow fields as dynamical systems, parameterized by Koopman Operators to mimic desired trajectories, and leverages the divergence properties of the learnt flow fields to obtain smooth motion fields that converge to a desired reference trajectory when a robot is placed away from the desired trajectory, and tracks the trajectory until the end point. To demonstrate the effectiveness of our approach, we show evaluations of KoopMotion on the LASA human handwriting dataset and a 3D manipulator end-effector trajectory dataset, including spectral analysis. We also perform experiments on a physical robot, verifying KoopMotion on a miniature autonomous surface vehicle operating in a non-static fluid flow environment. Our approach is highly sample efficient in both space and time, requiring only 3\% of the LASA dataset to generate dense motion plans. Additionally, KoopMotion provides a significant improvement over baselines when comparing metrics that measure spatial and temporal dynamics modeling efficacy. Code at: \href{https://alicekl.github.io/koop-motion/}{\color{blue}{https://alicekl.github.io/koop-motion}}.