Quantum Machine Learning and Grover's Algorithm for Quantum Optimization of Robotic Manipulators
作者: Hassen Nigatu, Shi Gaokun, Li Jituo, Wang Jin, Lu Guodong, Howard Li
分类: cs.RO
发布日期: 2025-09-08 (更新: 2025-10-28)
💡 一句话要点
提出基于量子机器学习和Grover算法的机器人优化方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 量子机器学习 Grover算法 机器人优化 运动学 量子计算
📋 核心要点
- 高自由度机器人机械臂的优化需要在复杂、高维的配置空间中搜索,这对经典方法提出了计算挑战。
- 论文提出了一种量子原生框架,利用量子机器学习训练正向运动学模型,并结合Grover算法加速优化过程。
- 实验表明,该方法在不同自由度的机械臂任务中,相较于经典优化器实现了显著的加速,最高可达93倍。
📝 摘要(中文)
本文提出了一种量子原生框架,该框架集成了量子机器学习与Grover算法,旨在高效解决机器人机械臂的运动学优化问题。该方法训练一个参数化的量子电路来近似正向运动学模型,并以此构建一个Oracle来识别最优配置。Grover算法利用此Oracle,实现了搜索复杂度的二次降低。在模拟的1自由度、2自由度和双臂机械臂任务中,该方法相较于经典的优化器(如Nelder Mead)实现了显著的加速,随着问题维度的增加,加速比高达93倍。这项工作为机器人运动学优化建立了一个基础性的量子原生框架,有效地连接了量子计算和机器人问题。
🔬 方法详解
问题定义:论文旨在解决高自由度机器人机械臂运动学优化问题,即在复杂高维配置空间中寻找最优关节角度配置。传统优化方法,如Nelder-Mead算法,在处理高维问题时计算复杂度高,效率低下。
核心思路:论文的核心思路是利用量子计算的优势,通过量子机器学习近似正向运动学模型,并利用Grover算法加速搜索最优配置。量子机器学习能够高效地学习复杂的函数关系,而Grover算法能够以平方级的加速搜索无序数据库。
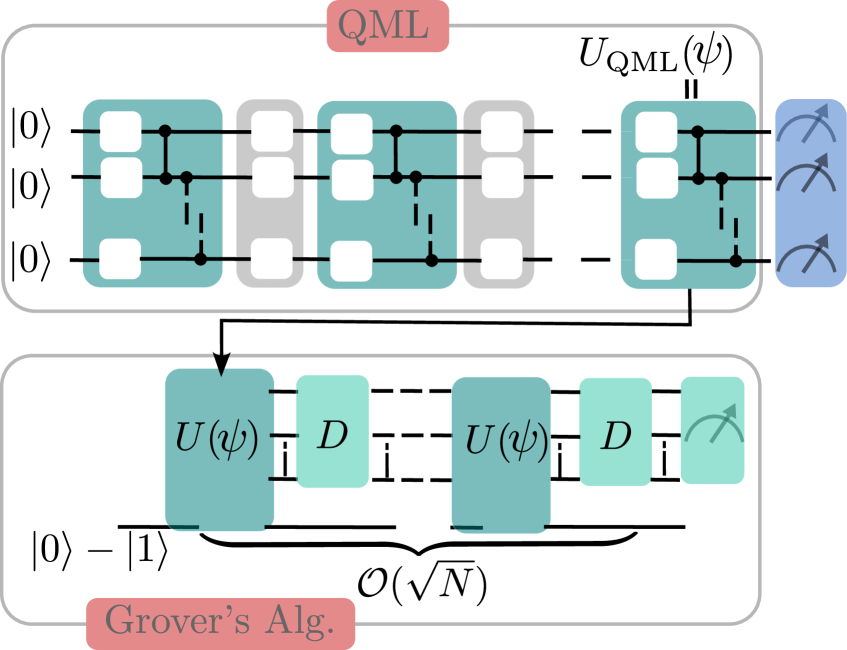
技术框架:该框架主要包含两个阶段:1) 量子机器学习阶段:使用参数化的量子电路(PQC)训练正向运动学模型。PQC的参数通过最小化预测位置与目标位置之间的误差来优化。2) 量子优化阶段:利用训练好的PQC构建Grover算法的Oracle。Oracle标记符合优化目标的配置,Grover算法通过多次迭代,以较高的概率找到最优配置。
关键创新:该方法最重要的创新点在于构建了一个完全基于量子计算的机器人运动学优化框架。与传统方法相比,该框架利用量子机器学习和Grover算法的优势,实现了搜索复杂度的降低,从而提高了优化效率。此外,该方法避免了经典计算中的数值计算误差累积问题。
关键设计:PQC的设计至关重要,需要根据机械臂的自由度和运动学特性进行选择。损失函数通常采用均方误差(MSE),用于衡量预测位置与目标位置之间的差异。Grover算法的迭代次数需要根据搜索空间的大小进行调整,以保证找到最优解的概率。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在模拟的1自由度、2自由度和双臂机械臂任务中均取得了显著的加速效果。与经典的Nelder Mead优化器相比,随着问题维度的增加,加速比最高可达93倍。这表明该方法在高维优化问题中具有显著的优势,验证了量子计算在机器人运动学优化中的潜力。
🎯 应用场景
该研究成果可应用于各种需要高精度和高效率机器人运动规划的领域,例如:工业自动化、医疗机器人、空间机器人等。通过量子计算加速机器人优化,可以显著提高生产效率,降低能源消耗,并为复杂环境下的机器人操作提供更可靠的解决方案。未来,该方法有望扩展到更复杂的机器人任务,如路径规划、碰撞避免等。
📄 摘要(原文)
Optimizing high-degree of freedom robotic manipulators requires searching complex, high-dimensional configuration spaces, a task that is computationally challenging for classical methods. This paper introduces a quantum native framework that integrates quantum machine learning with Grover's algorithm to solve kinematic optimization problems efficiently. A parameterized quantum circuit is trained to approximate the forward kinematics model, which then constructs an oracle to identify optimal configurations. Grover's algorithm leverages this oracle to provide a quadratic reduction in search complexity. Demonstrated on simulated 1-DoF, 2-DoF, and dual-arm manipulator tasks, the method achieves significant speedups-up to 93x over classical optimizers like Nelder Mead as problem dimensionality increases. This work establishes a foundational, quantum-native framework for robot kinematic optimization, effectively bridging quantum computing and robotics problems.