Safe Robust Predictive Control-based Motion Planning of Automated Surface Vessels in Inland Waterways
作者: Sajad Ahmadi, Hossein Nejatbakhsh Esfahani, Javad Mohammadpour Velni
分类: cs.RO, eess.SY
发布日期: 2025-09-08
💡 一句话要点
提出基于安全鲁棒预测控制的水面无人艇内河航行运动规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 水面无人艇 运动规划 鲁棒模型预测控制 控制屏障函数 内河航运
📋 核心要点
- 内河航运面临狭窄航道、高交通密度和水动力扰动等挑战,现有自主船舶导航方法缺乏足够的鲁棒性和精度。
- 该论文提出了一种结合鲁棒模型预测控制(RMPC)和控制屏障函数(CBF)的运动规划方法,保证安全。
- 仿真结果验证了该方法在复杂水域安全引导无人艇的有效性,并展示了其在安全性和适应性方面的优势。
📝 摘要(中文)
本文提出了一种用于自动化水面无人艇(ASV)的运动规划新方法,该方法结合了鲁棒模型预测控制(RMPC)和控制屏障函数(CBF)。通过将航道边界和障碍物作为安全约束纳入控制设计框架,该方法确保了在复杂水道上的避碰和鲁棒导航。仿真结果表明,该方法在实际条件下能够安全地引导ASV,与现有技术相比,提高了安全性和适应性。
🔬 方法详解
问题定义:论文旨在解决自动化水面无人艇(ASV)在内河航道中安全、鲁棒的运动规划问题。现有方法在应对狭窄航道、高交通密度和水动力扰动等复杂环境时,往往缺乏足够的鲁棒性和精度,容易发生碰撞或偏离航线。
核心思路:论文的核心思路是将航道边界和障碍物作为安全约束,融入到鲁棒模型预测控制(RMPC)的设计框架中。通过控制屏障函数(CBF)来保证满足这些安全约束,从而确保无人艇在复杂水域中的安全航行。RMPC则负责在满足安全约束的前提下,优化无人艇的运动轨迹,使其能够高效地到达目标点。
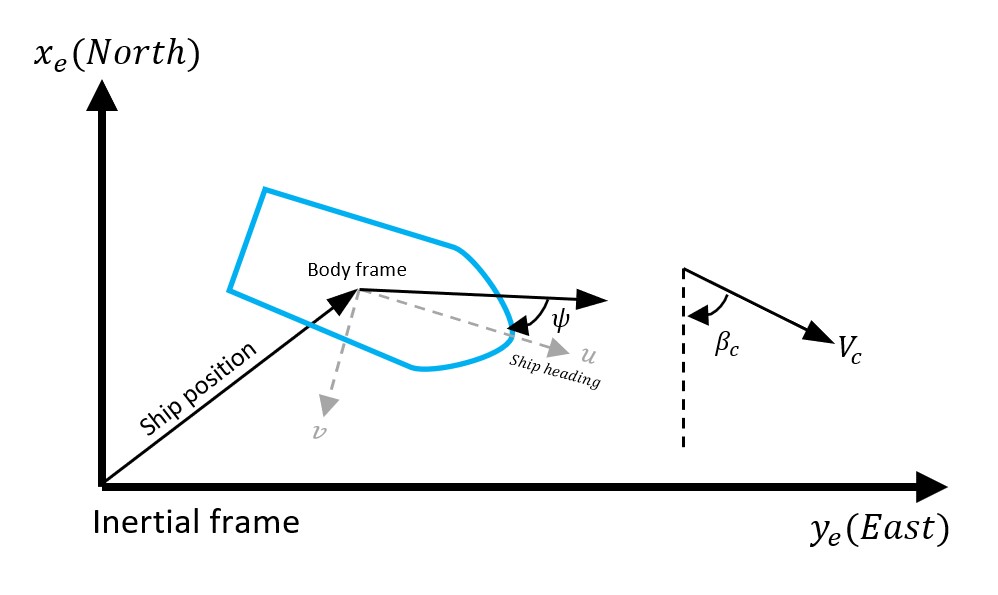
技术框架:该方法的技术框架主要包括以下几个模块:1) 船舶运动学/动力学模型:用于描述无人艇的运动状态和行为。2) 鲁棒模型预测控制器(RMPC):根据当前状态和环境信息,预测未来一段时间内的状态,并优化控制输入,以实现期望的运动轨迹。3) 控制屏障函数(CBF):定义安全区域,并确保控制输入能够使无人艇始终保持在安全区域内,避免碰撞。4) 约束条件:包括航道边界约束、障碍物约束、速度约束等。整个流程是RMPC在满足CBF约束下进行轨迹优化,从而保证安全和效率。
关键创新:该方法最重要的创新点在于将控制屏障函数(CBF)与鲁棒模型预测控制(RMPC)相结合,从而在保证安全性的同时,实现了鲁棒的运动规划。传统的RMPC方法通常只考虑状态和控制输入的约束,而忽略了环境中的安全约束。而该方法通过引入CBF,能够显式地保证无人艇始终保持在安全区域内,从而避免碰撞。
关键设计:CBF的设计是关键。需要选择合适的CBF函数,并调整其参数,以确保安全区域的合理性和控制输入的有效性。RMPC中需要合理设置预测时域和控制时域,以及状态和控制输入的权重,以实现期望的性能。此外,还需要考虑水动力扰动等不确定因素对控制性能的影响,并采取相应的鲁棒性措施。
🖼️ 关键图片


📊 实验亮点
仿真结果表明,该方法能够有效地引导无人艇在复杂的内河航道中安全航行,即使在存在水动力扰动的情况下,也能保持良好的鲁棒性。与传统的模型预测控制方法相比,该方法能够显著提高无人艇的安全性,避免碰撞事故的发生。具体性能数据未知,但摘要强调了安全性和适应性的提升。
🎯 应用场景
该研究成果可应用于内河水域的自动化航运、港口物流、水上巡逻和环境监测等领域。通过提高水面无人艇的自主导航能力和安全性,可以降低运营成本,提高运输效率,并减少人为事故的发生。未来,该技术有望推广到更广泛的水域,例如海洋环境,从而实现更智能、更高效的水上交通运输。
📄 摘要(原文)
Deploying self-navigating surface vessels in inland waterways offers a sustainable alternative to reduce road traffic congestion and emissions. However, navigating confined waterways presents unique challenges, including narrow channels, higher traffic density, and hydrodynamic disturbances. Existing methods for autonomous vessel navigation often lack the robustness or precision required for such environments. This paper presents a new motion planning approach for Automated Surface Vessels (ASVs) using Robust Model Predictive Control (RMPC) combined with Control Barrier Functions (CBFs). By incorporating channel borders and obstacles as safety constraints within the control design framework, the proposed method ensures both collision avoidance and robust navigation on complex waterways. Simulation results demonstrate the efficacy of the proposed method in safely guiding ASVs under realistic conditions, highlighting its improved safety and adaptability compared to the state-of-the-art.