Super-LIO: A Robust and Efficient LiDAR-Inertial Odometry System with a Compact Mapping Strategy
作者: Liansheng Wang, Xinke Zhang, Chenhui Li, Dongjiao He, Yihan Pan, Jianjun Yi
分类: cs.RO
发布日期: 2025-09-06 (更新: 2025-12-26)
备注: 8 pages, 5 figures
期刊: IEEE Robotics and Automation Letters (RA-L), 2026
🔗 代码/项目: GITHUB
💡 一句话要点
Super-LIO:面向资源受限平台的高效鲁棒激光雷达惯性里程计系统
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 激光雷达惯性里程计 LIO 八叉树地图 OctVox KNN搜索 自主导航 资源受限平台
📋 核心要点
- 现有LIO方法在资源受限平台面临计算和内存限制的挑战,难以同时保证性能和精度。
- Super-LIO通过紧凑的OctVox地图结构和启发式KNN搜索策略,在保证精度的同时,显著提升了效率。
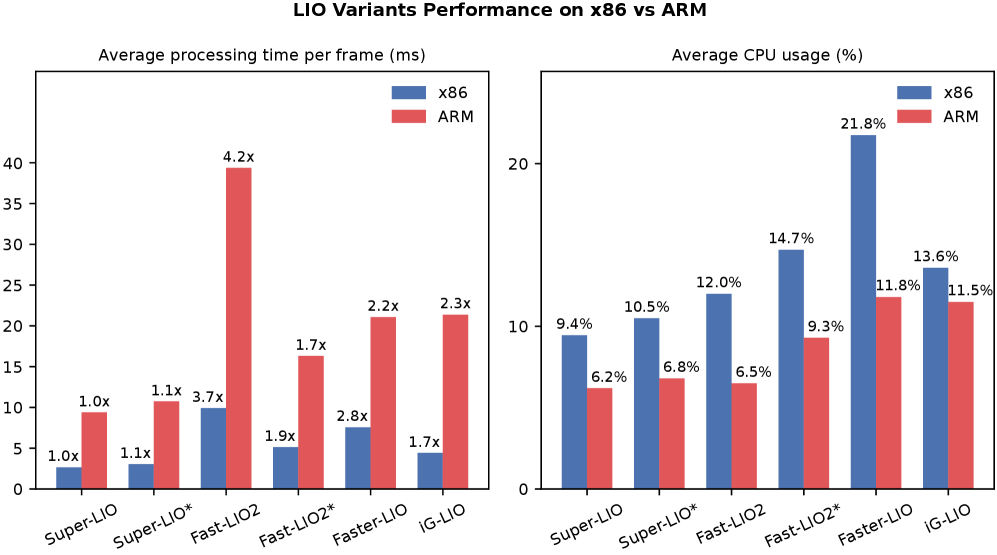
- 实验表明,Super-LIO在X86和ARM平台上均优于现有方法,速度提升73%,且资源消耗更低。
📝 摘要(中文)
本文提出Super-LIO,一个鲁棒的激光雷达惯性里程计(LIO)系统,旨在提供高性能和高精度,适用于如无人机和移动自主系统等应用,尤其针对资源受限平台。Super-LIO的核心是一个紧凑的基于八叉体素的地图结构,称为OctVox,它限制每个体素为八个融合的子体素,从而实现严格的点密度控制和地图更新期间的增量去噪。这种设计实现了一个简单而高效且准确的地图结构,可以轻松集成到现有的LIO框架中。此外,Super-LIO设计了一种启发式引导的KNN策略(HKNN),通过利用空间局部性来加速对应搜索,进一步降低运行时开销。在四个公开数据集和多个自采集数据集(总计超过30个序列)上评估了所提出的系统。在X86和ARM平台上的大量测试证实,Super-LIO提供了卓越的效率和鲁棒性,同时保持了具有竞争力的精度。Super-LIO处理每一帧的速度比SOTA快约73%,同时消耗更少的CPU资源。该系统完全开源,并且与各种激光雷达传感器和平台即插即用兼容。
🔬 方法详解
问题定义:论文旨在解决激光雷达惯性里程计(LIO)在资源受限平台上部署时,计算量大、内存占用高,难以同时保证精度和效率的问题。现有方法通常难以在精度、效率和鲁棒性之间取得平衡,限制了其在无人机、移动机器人等嵌入式平台上的应用。
核心思路:论文的核心思路是设计一种紧凑且高效的地图表示方法,以及一种快速的特征匹配策略。通过限制地图中每个体素的点密度,并利用空间局部性加速特征点匹配,从而降低计算复杂度和内存占用,提高LIO系统的整体效率。
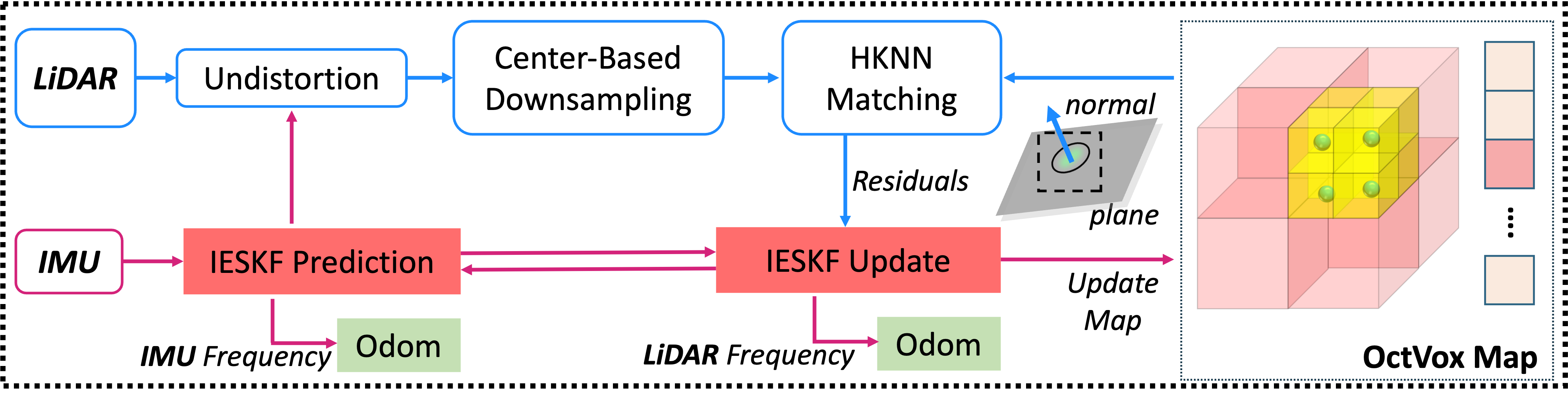
技术框架:Super-LIO系统的整体框架包括以下几个主要模块:1) 激光雷达数据预处理;2) 惯性测量单元(IMU)数据处理;3) 基于OctVox的地图构建与更新;4) 启发式KNN搜索的特征匹配;5) 位姿估计与优化。系统首先对激光雷达和IMU数据进行预处理,然后利用OctVox地图结构进行环境建模,并通过HKNN策略进行特征匹配,最后进行位姿估计和优化,得到最终的里程计结果。
关键创新:Super-LIO的主要创新点在于:1) 提出了OctVox地图结构,通过限制每个体素的子体素数量,实现了紧凑的地图表示和增量去噪;2) 设计了启发式KNN搜索(HKNN)策略,利用空间局部性加速特征匹配,降低了计算复杂度。与现有方法相比,Super-LIO在保证精度的前提下,显著提高了效率和鲁棒性。
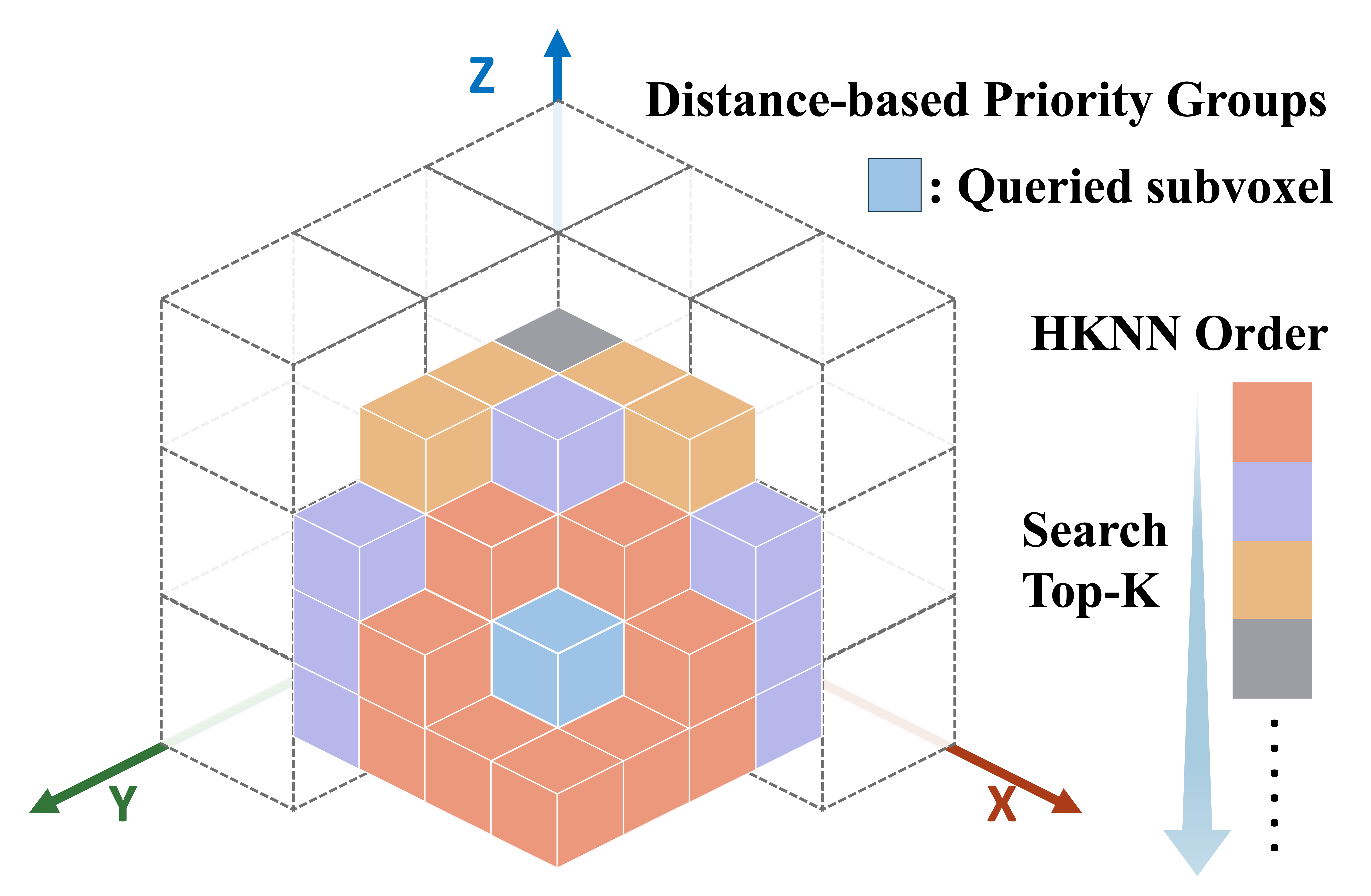
关键设计:OctVox地图结构的关键设计在于限制每个体素最多包含8个子体素,从而控制点密度,避免地图过于稠密。HKNN策略的关键设计在于利用先验信息(如相邻帧的位姿变化)引导KNN搜索,缩小搜索范围,提高匹配速度。具体的参数设置包括OctVox的体素大小、HKNN的搜索半径等,这些参数需要根据具体的应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
Super-LIO在多个公开数据集和自采集数据集上进行了评估,结果表明其在效率和鲁棒性方面优于现有方法。在处理速度上,Super-LIO比SOTA方法快约73%,同时消耗更少的CPU资源。在精度方面,Super-LIO保持了与SOTA方法相当的水平。这些实验结果验证了Super-LIO在资源受限平台上的优势。
🎯 应用场景
Super-LIO适用于资源受限的自主系统,如无人机、移动机器人、手持设备等。其高效性和鲁棒性使其能够在计算能力有限、环境复杂的场景中实现精准的定位和建图,为自主导航、环境感知、SLAM等应用提供基础支持。未来,Super-LIO有望应用于智慧城市、智能安防、物流配送等领域。
📄 摘要(原文)
LiDAR-Inertial Odometry (LIO) is a foundational technique for autonomous systems, yet its deployment on resource-constrained platforms remains challenging due to computational and memory limitations. We propose Super-LIO, a robust LIO system that demands both high performance and accuracy, ideal for applications such as aerial robots and mobile autonomous systems. At the core of Super-LIO is a compact octo-voxel-based map structure, termed OctVox, that limits each voxel to eight fused subvoxels, enabling strict point density control and incremental denoising during map updates. This design enables a simple yet efficient and accurate map structure, which can be easily integrated into existing LIO frameworks. Additionally, Super-LIO designs a heuristic-guided KNN strategy (HKNN) that accelerates the correspondence search by leveraging spatial locality, further reducing runtime overhead. We evaluated the proposed system using four publicly available datasets and several self-collected datasets, totaling more than 30 sequences. Extensive testing on both X86 and ARM platforms confirms that Super-LIO offers superior efficiency and robustness, while maintaining competitive accuracy. Super-LIO processes each frame approximately 73% faster than SOTA, while consuming less CPU resources. The system is fully open-source and plug-and-play compatible with a wide range of LiDAR sensors and platforms. The implementation is available at: https://github.com/Liansheng-Wang/Super-LIO.git