Shared Autonomy through LLMs and Reinforcement Learning for Applications to Ship Hull Inspections
作者: Cristiano Caissutti, Estelle Gerbier, Ehsan Khorrambakht, Paolo Marinelli, Andrea Munafo', Andrea Caiti
分类: cs.RO
发布日期: 2025-09-05
💡 一句话要点
融合LLM与强化学习的共享自主系统,用于船舶船体检测
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 共享自主 大型语言模型 强化学习 船舶船体检测 人机交互 行为树 海洋机器人
📋 核心要点
- 现有海洋机器人自主系统在复杂、高风险环境中人机协作不足,难以有效降低操作员认知负荷。
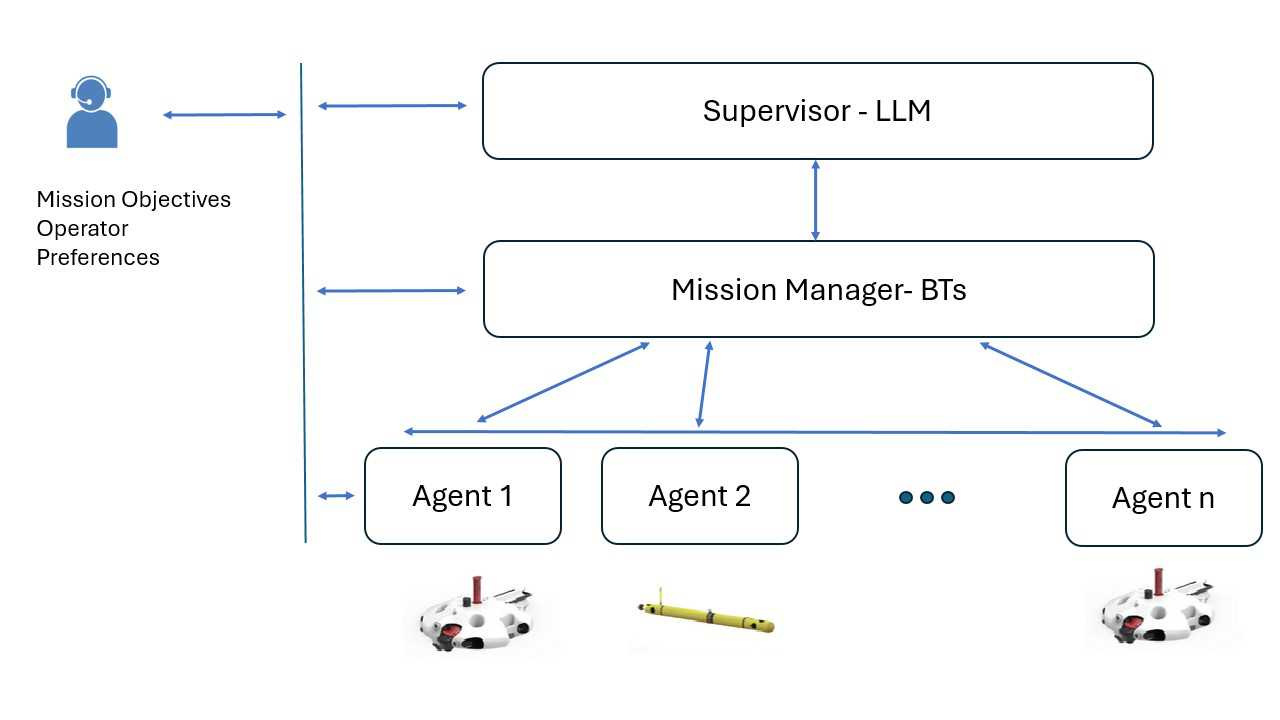
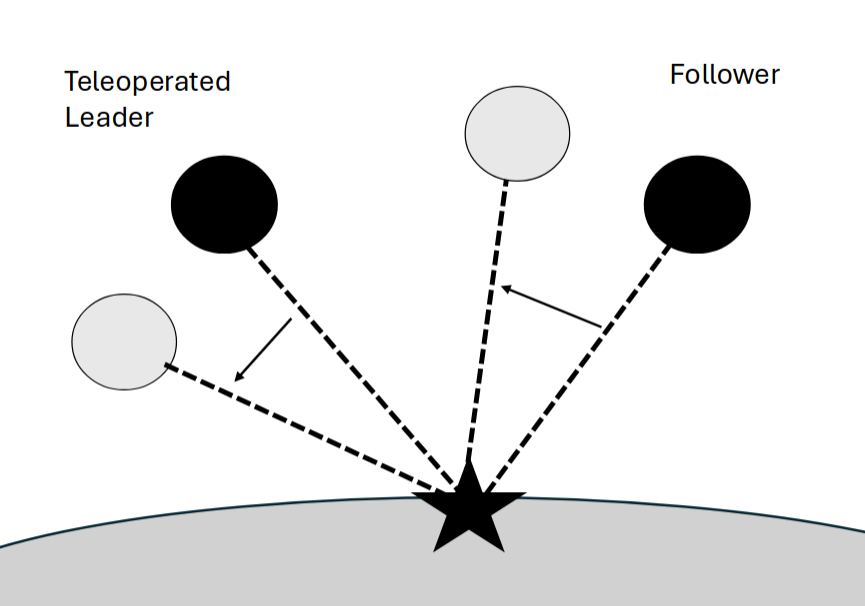
- 提出一种多层架构,融合LLM、人机交互框架和基于行为树的任务管理器,实现意图感知和自适应协调。
- 初步实验结果表明,该架构能有效降低操作员认知负荷,增强系统透明度,并提升与人类意图对齐的自适应行为。
📝 摘要(中文)
本文研究了在异构海洋机器人集群中推进共享自主的三种互补方法的交互:(i) 集成大型语言模型(LLM)以促进直观的高级任务规范并支持船体检测任务;(ii) 在多智能体环境中实施人机交互框架,以实现自适应和意图感知的协调;(iii) 开发基于行为树的模块化任务管理器,以提供可解释和灵活的任务控制。来自模拟和真实湖泊环境的初步结果表明,这种多层架构具有降低操作员认知负荷、增强透明度以及改进与人类意图对齐的自适应行为的潜力。目前的工作重点是完全集成这些组件,改进协调机制,并在实际港口场景中验证系统。本研究有助于为安全关键型海洋机器人应用中可信赖的人机协作自主建立模块化和可扩展的基础。
🔬 方法详解
问题定义:船舶船体检测任务通常需要在复杂且不确定的海洋环境中进行,现有自主系统难以有效整合人类操作员的意图和知识,导致操作员认知负荷过高,系统适应性不足。现有方法在处理高级任务规范、人机交互和任务管理方面存在局限性。
核心思路:论文的核心思路是构建一个多层架构,利用LLM进行高级任务规划,通过人机交互框架实现意图感知和自适应协调,并使用基于行为树的任务管理器实现灵活的任务控制。这种分层设计旨在将人类操作员的专业知识和LLM的推理能力与机器人的执行能力相结合,从而提高系统的整体性能和可靠性。
技术框架:该系统包含三个主要模块:1) LLM任务规划器:负责接收高级任务指令,并将其转化为机器人可执行的子任务序列。2) 人机交互框架:允许操作员实时监控机器人状态,并根据需要进行干预和调整。3) 基于行为树的任务管理器:负责根据当前环境和操作员指令,动态调整机器人的行为策略。这三个模块协同工作,共同完成船体检测任务。
关键创新:该论文的关键创新在于将LLM、人机交互和行为树三种技术有机结合,构建了一个多层次的共享自主系统。这种集成方式能够充分利用各种技术的优势,实现更高级别的自主性和人机协作。与传统的自主系统相比,该系统具有更强的适应性、鲁棒性和可解释性。
关键设计:LLM采用预训练模型,并通过微调来适应船体检测任务的特定需求。人机交互框架采用图形化界面,允许操作员直观地监控机器人状态和进行干预。行为树采用模块化设计,允许灵活地组合和调整机器人的行为策略。具体的参数设置和损失函数等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文通过仿真和真实湖泊环境实验验证了所提出架构的有效性。初步结果表明,该系统能够降低操作员的认知负荷,增强系统的透明度,并提高与人类意图对齐的自适应行为。虽然论文中没有提供具体的性能数据和对比基线,但实验结果表明该架构具有良好的应用潜力。
🎯 应用场景
该研究成果可应用于各种海洋机器人任务,例如水下基础设施检测、海洋环境监测、搜救行动等。通过提高人机协作效率和系统自主性,可以降低操作成本,提高任务安全性,并扩展海洋机器人的应用范围。未来,该技术有望在港口管理、海上安全和海洋资源开发等领域发挥重要作用。
📄 摘要(原文)
Shared autonomy is a promising paradigm in robotic systems, particularly within the maritime domain, where complex, high-risk, and uncertain environments necessitate effective human-robot collaboration. This paper investigates the interaction of three complementary approaches to advance shared autonomy in heterogeneous marine robotic fleets: (i) the integration of Large Language Models (LLMs) to facilitate intuitive high-level task specification and support hull inspection missions, (ii) the implementation of human-in-the-loop interaction frameworks in multi-agent settings to enable adaptive and intent-aware coordination, and (iii) the development of a modular Mission Manager based on Behavior Trees to provide interpretable and flexible mission control. Preliminary results from simulation and real-world lake-like environments demonstrate the potential of this multi-layered architecture to reduce operator cognitive load, enhance transparency, and improve adaptive behaviour alignment with human intent. Ongoing work focuses on fully integrating these components, refining coordination mechanisms, and validating the system in operational port scenarios. This study contributes to establishing a modular and scalable foundation for trustworthy, human-collaborative autonomy in safety-critical maritime robotics applications.