Odometry Calibration and Pose Estimation of a 4WIS4WID Mobile Wall Climbing Robot
作者: Branimir Ćaran, Vladimir Milić, Marko Švaco, Bojan Jerbić
分类: cs.RO
发布日期: 2025-09-04
备注: ACCEPTED FOR IEEE EUROPEAN CONFERENCE ON MOBILE ROBOTS 2025. PREPRINT VERSION. ACCEPTED JUNE, 2025 AND PRESENTED SEPTEMBER, 2025
💡 一句话要点
针对壁面爬行机器人,提出融合多模态数据的里程计标定与位姿估计方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 壁面爬行机器人 位姿估计 里程计标定 多传感器融合 扩展卡尔曼滤波
📋 核心要点
- 壁面爬行机器人依赖里程计进行定位,但易受系统和非系统误差影响,导致漂移。
- 提出融合轮式里程计、视觉里程计和IMU数据的位姿估计器,使用EKF和UKF进行数据融合。
- 采用非线性优化(Levenberg-Marquardt)和随机方法(遗传算法、粒子群)进行系统参数标定,并在实验机器人上验证。
📝 摘要(中文)
本文提出了一种用于四轮独立转向四轮独立驱动(4WIS4WID)壁面爬行移动机器人的位姿估计器设计方案。该方案基于多模态测量数据的融合,包括轮式里程计、视觉里程计和惯性测量单元(IMU)数据,并采用扩展卡尔曼滤波器(EKF)和无迹卡尔曼滤波器(UKF)进行融合。位姿估计器是壁面爬行移动机器人的关键组成部分,因为它们的操作环境涉及在建筑施工中携带精确的测量设备和维护工具,需要在测量时提供关于建筑物上姿态的信息。由于建筑物外墙复杂的几何形状和材料特性,传统的定位传感器(如激光、超声波或雷达)通常不适用于壁面爬行机器人。此外,基于GPS的定位通常在这些环境中不可靠,因为钢筋混凝土和电磁干扰会导致信号退化。因此,机器人里程计仍然是速度和位置信息的主要来源,尽管它容易受到系统误差和非系统误差引起的漂移的影响。机器人的系统参数标定采用非线性优化和Levenberg-Marquardt方法(作为Newton-Gauss和基于梯度的模型拟合方法),而遗传算法和粒子群算法被用作运动学参数标定的基于随机的方法。标定方法和位姿估计器的性能和结果通过在实验性移动壁面爬行机器人上进行的实验进行了详细验证。
🔬 方法详解
问题定义:壁面爬行机器人需要在复杂且受限的环境中进行精确定位,但传统定位方法(如GPS、激光雷达)受限。轮式里程计是主要信息来源,但存在系统误差和非系统误差导致的漂移,影响定位精度。因此,需要一种鲁棒的位姿估计方法,能够校正里程计误差并融合多传感器数据。
核心思路:核心思路是融合多种传感器数据(轮式里程计、视觉里程计、IMU),利用各自的优势互补,提高位姿估计的准确性和鲁棒性。同时,通过标定方法校正里程计的系统误差,减少漂移。选择EKF和UKF作为融合算法,是因为它们在非线性系统状态估计中应用广泛。
技术框架:整体框架包括以下几个主要模块:1) 数据采集:从轮式里程计、视觉里程计和IMU获取数据。2) 里程计标定:使用非线性优化和随机方法校正里程计的系统误差。3) 数据融合:使用EKF或UKF将多传感器数据融合,估计机器人位姿。4) 位姿输出:输出机器人在全局坐标系下的位置和姿态。
关键创新:主要创新点在于针对壁面爬行机器人的特点,设计了一种多模态数据融合的位姿估计方案,并结合了多种标定方法来校正里程计误差。与传统方法相比,该方案更适用于复杂环境下的壁面爬行机器人定位。
关键设计:在里程计标定方面,采用了Levenberg-Marquardt算法进行非线性优化,以及遗传算法和粒子群算法进行随机搜索。在数据融合方面,分别使用了EKF和UKF,并比较了它们的性能。具体参数设置和损失函数的设计细节在论文中应该有更详细的描述(未知)。
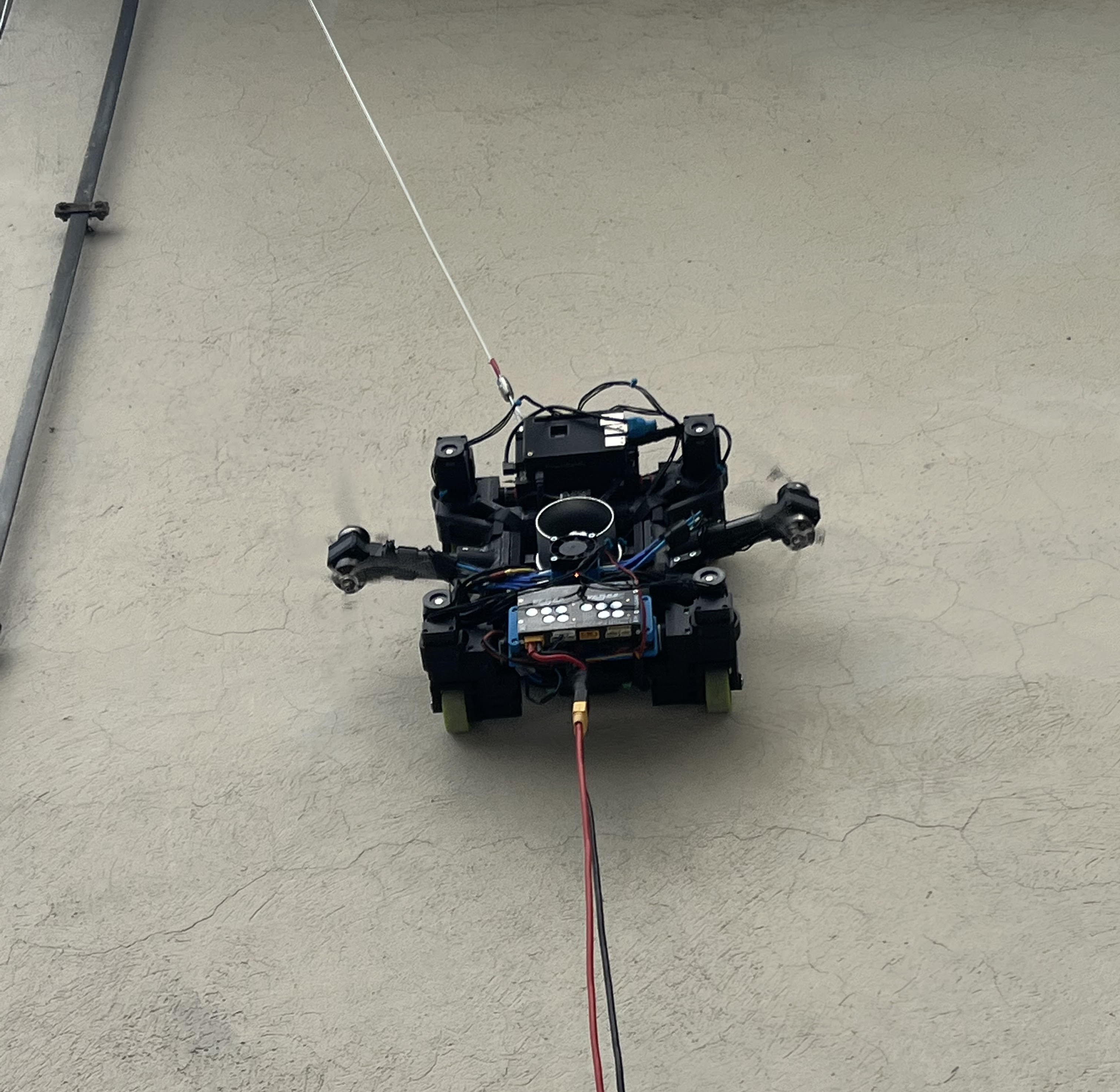
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了所提出的里程计标定和位姿估计方法的有效性。虽然摘要中没有给出具体的性能数据和对比基线,但强调了实验是在真实的壁面爬行机器人上进行的,这表明该方法具有实际应用价值。通过对比不同的标定方法和融合算法(EKF和UKF),可以评估各种方案的优劣,为实际应用提供参考。
🎯 应用场景
该研究成果可应用于建筑检测、维护和修复等领域。壁面爬行机器人可以携带检测设备,对建筑物外墙进行安全、高效的检测,例如裂缝检测、涂层评估等。此外,还可以用于高空作业,例如外墙清洁、喷涂等,降低人工成本和安全风险。未来,该技术有望推广到其他复杂环境下的移动机器人定位应用。
📄 摘要(原文)
This paper presents the design of a pose estimator for a four wheel independent steer four wheel independent drive (4WIS4WID) wall climbing mobile robot, based on the fusion of multimodal measurements, including wheel odometry, visual odometry, and an inertial measurement unit (IMU) data using Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF). The pose estimator is a critical component of wall climbing mobile robots, as their operational environment involves carrying precise measurement equipment and maintenance tools in construction, requiring information about pose on the building at the time of measurement. Due to the complex geometry and material properties of building facades, the use of traditional localization sensors such as laser, ultrasonic, or radar is often infeasible for wall-climbing robots. Moreover, GPS-based localization is generally unreliable in these environments because of signal degradation caused by reinforced concrete and electromagnetic interference. Consequently, robot odometry remains the primary source of velocity and position information, despite being susceptible to drift caused by both systematic and non-systematic errors. The calibrations of the robot's systematic parameters were conducted using nonlinear optimization and Levenberg-Marquardt methods as Newton-Gauss and gradient-based model fitting methods, while Genetic algorithm and Particle swarm were used as stochastic-based methods for kinematic parameter calibration. Performance and results of the calibration methods and pose estimators were validated in detail with experiments on the experimental mobile wall climbing robot.