Efficient Active Training for Deep LiDAR Odometry
作者: Beibei Zhou, Zhiyuan Zhang, Zhenbo Song, Jianhui Guo, Hui Kong
分类: cs.RO, cs.CV
发布日期: 2025-09-03
💡 一句话要点
提出高效主动学习框架,提升深度LiDAR里程计在复杂环境下的训练效率与泛化性
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: LiDAR里程计 主动学习 深度学习 训练效率 环境适应性
📋 核心要点
- 深度LiDAR里程计模型需要大量多样化的训练数据以适应不同环境,导致训练效率低下。
- 提出主动训练框架,通过初始训练集选择(ITSS)和主动增量选择(AIS)策略,选择最具信息量的训练数据。
- 实验表明,该方法仅使用52%的数据量即可达到全数据集训练的性能,提升了训练效率和模型鲁棒性。
📝 摘要(中文)
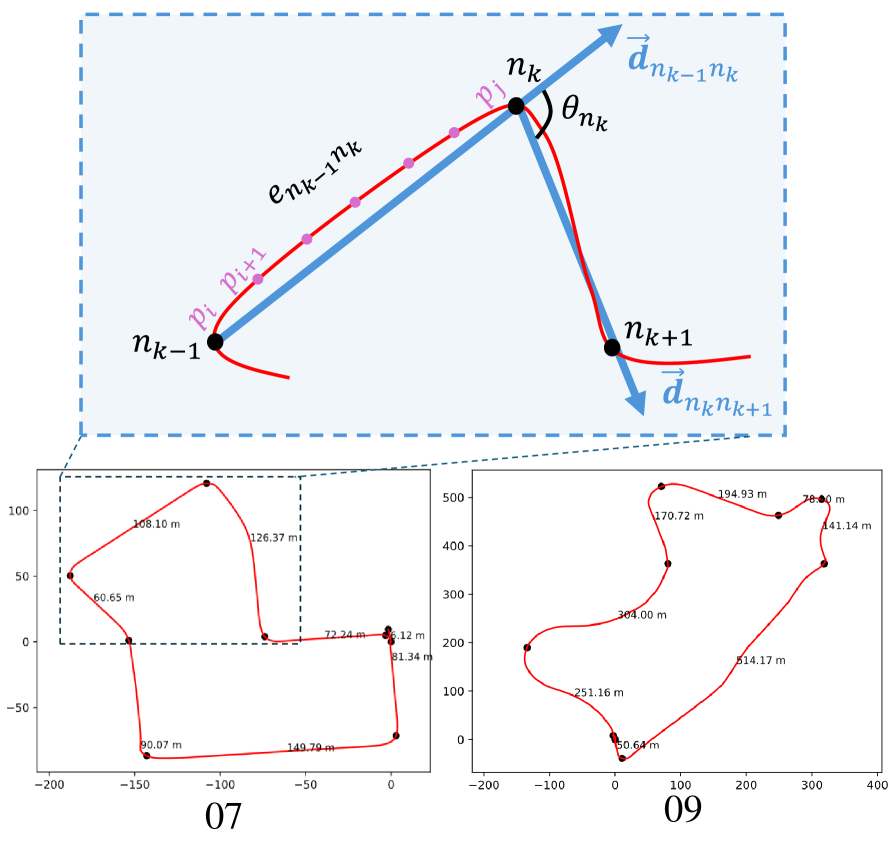
本文提出了一种主动训练框架,旨在提升深度LiDAR里程计模型的训练效率和泛化能力,使其能够适应多样化的环境。该框架通过选择性地提取训练数据,减少训练负担并增强模型泛化能力。框架包含两个关键策略:初始训练集选择(ITSS)和主动增量选择(AIS)。ITSS通过将一般天气下的运动序列分解为节点和边,进行详细的轨迹分析,优先选择多样化的序列来构建丰富的初始训练数据集。对于难以分析的复杂序列,尤其是在具有挑战性的雪天条件下,AIS使用场景重建和预测不一致性来迭代地选择训练样本,从而改进模型以处理各种真实场景。实验结果表明,该方法仅使用52%的序列数据量即可达到全数据集训练的性能,验证了主动训练范式的有效性和鲁棒性。
🔬 方法详解
问题定义:深度LiDAR里程计需要大量数据进行训练,尤其是在复杂多变的环境下。传统方法通常采用全量数据训练,计算资源消耗大,效率低,且容易过拟合。现有方法难以在保证性能的同时,降低训练成本和提升泛化能力。
核心思路:本文的核心思路是主动学习,即并非使用所有数据进行训练,而是通过某种策略选择最具信息量的数据进行训练,从而在减少数据量的同时,保证甚至提升模型的性能。通过主动选择训练样本,模型可以更快地学习到关键特征,提高泛化能力。
技术框架:该主动训练框架包含两个主要阶段:初始训练集选择(ITSS)和主动增量选择(AIS)。ITSS阶段,首先将一般天气下的运动序列分解为节点和边,进行轨迹分析,选择具有代表性的序列构建初始训练集。AIS阶段,针对复杂场景(如雪天),利用场景重建和预测不一致性指标,迭代地选择对模型提升最大的样本加入训练集。整个流程旨在构建一个高效且具有代表性的训练数据集。
关键创新:该方法的主要创新在于结合了基于轨迹分析的初始训练集选择和基于预测不一致性的主动增量选择。ITSS利用轨迹信息,保证初始训练集的多样性;AIS则关注模型在复杂场景下的表现,通过预测不一致性来选择最具价值的样本,从而提升模型在困难场景下的鲁棒性。这种结合使得模型能够快速适应各种环境。
关键设计:ITSS阶段,轨迹分析的具体指标(例如轨迹长度、曲率等)用于评估序列的多样性。AIS阶段,场景重建可能采用点云配准等方法,预测不一致性可以通过比较不同时刻的位姿预测结果来衡量。具体的损失函数和网络结构取决于所使用的深度LiDAR里程计模型,但主动学习框架可以与多种模型结合使用。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在多个数据集和天气条件下均表现出色。尤其值得注意的是,该方法仅使用52%的序列数据量,即可达到与全数据集训练相当的性能。这显著提升了训练效率,并验证了主动训练范式的有效性。
🎯 应用场景
该研究成果可应用于自动驾驶、机器人导航、三维地图重建等领域。通过减少训练数据量,降低了模型部署和维护的成本,使得深度LiDAR里程计系统能够更快速、更可靠地适应各种复杂环境,具有重要的实际应用价值和商业前景。
📄 摘要(原文)
Robust and efficient deep LiDAR odometry models are crucial for accurate localization and 3D reconstruction, but typically require extensive and diverse training data to adapt to diverse environments, leading to inefficiencies. To tackle this, we introduce an active training framework designed to selectively extract training data from diverse environments, thereby reducing the training load and enhancing model generalization. Our framework is based on two key strategies: Initial Training Set Selection (ITSS) and Active Incremental Selection (AIS). ITSS begins by breaking down motion sequences from general weather into nodes and edges for detailed trajectory analysis, prioritizing diverse sequences to form a rich initial training dataset for training the base model. For complex sequences that are difficult to analyze, especially under challenging snowy weather conditions, AIS uses scene reconstruction and prediction inconsistency to iteratively select training samples, refining the model to handle a wide range of real-world scenarios. Experiments across datasets and weather conditions validate our approach's effectiveness. Notably, our method matches the performance of full-dataset training with just 52\% of the sequence volume, demonstrating the training efficiency and robustness of our active training paradigm. By optimizing the training process, our approach sets the stage for more agile and reliable LiDAR odometry systems, capable of navigating diverse environmental conditions with greater precision.