INF-3DP: Implicit Neural Fields for Collision-Free Multi-Axis 3D Printing
作者: Jiasheng Qu, Zhuo Huang, Dezhao Guo, Hailin Sun, Aoran Lyu, Chengkai Dai, Yeung Yam, Guoxin Fang
分类: cs.RO, cs.CG
发布日期: 2025-09-02
💡 一句话要点
INF-3DP:基于隐式神经场的无碰撞多轴3D打印框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 隐式神经场 多轴3D打印 刀具路径生成 运动规划 碰撞避免
📋 核心要点
- 传统多轴3D打印方法在刀具路径生成和运动规划上存在挑战,难以实现全局无碰撞和高效优化。
- INF-3DP利用隐式神经场统一表示模型、制造目标和运动规划,实现端到端的可微优化。
- 实验表明,INF-3DP相比传统方法速度提升高达两个数量级,并显著降低了路径点到表面的误差。
📝 摘要(中文)
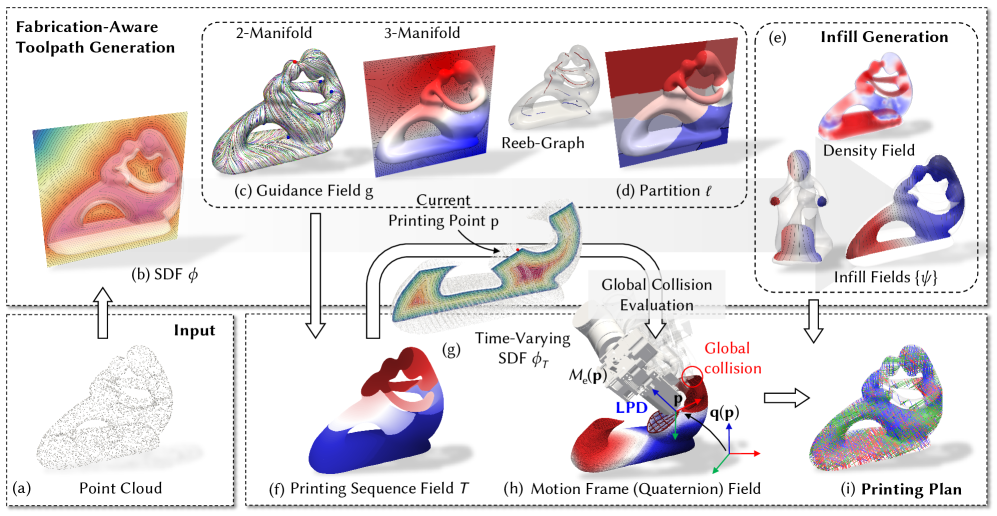
本文提出了一种通用的、可扩展的计算框架INF-3DP,用于多轴3D打印。该框架基于隐式神经场(INFs),统一了刀具路径生成和全局无碰撞运动规划的所有阶段。在我们的流程中,输入模型被表示为有符号距离场(SDF),诸如无支撑打印、表面光洁度质量和挤出控制等制造目标被直接编码到隐式引导场的优化中。这种统一的方法能够跨表面和内部域进行刀具路径优化,允许通过隐式场插值生成壳体和填充路径。然后,在连续四元数场上联合优化打印顺序和多轴运动。我们的连续公式将不断演变的打印对象构建为随时间变化的SDF,支持基于INF的运动规划中的可微全局碰撞处理。与基于显式表示的方法相比,INF-3DP实现了高达两个数量级的加速,并显著降低了路径点到表面的误差。我们通过各种复杂的模型验证了我们的框架,并通过使用机器人辅助多轴系统的物理制造实验证明了其效率。
🔬 方法详解
问题定义:多轴3D打印需要生成优化的刀具路径,同时避免碰撞,并满足特定的制造目标(如无支撑打印、表面质量等)。传统方法通常依赖于显式几何表示,计算复杂度高,难以进行全局优化,并且在处理复杂模型时容易出现碰撞。现有的基于显式表示的方法在速度和精度上存在瓶颈。
核心思路:INF-3DP的核心在于使用隐式神经场(INFs)来统一表示3D模型、制造目标和运动规划。通过将模型表示为有符号距离场(SDF),并将制造目标编码到隐式引导场的优化中,可以实现端到端的优化。此外,使用连续四元数场来表示打印顺序和多轴运动,从而支持可微的全局碰撞处理。
技术框架:INF-3DP的整体框架包括以下几个主要阶段:1) 使用隐式神经场表示输入模型为SDF。2) 将制造目标(如无支撑打印)编码到隐式引导场的优化中。3) 通过隐式场插值生成壳体和填充路径。4) 在连续四元数场上联合优化打印顺序和多轴运动。5) 使用时间变化的SDF进行可微的全局碰撞处理。
关键创新:INF-3DP的关键创新在于使用隐式神经场统一表示和优化3D打印的各个阶段,包括刀具路径生成、运动规划和碰撞避免。与传统的基于显式表示的方法相比,INF-3DP能够实现更高的效率和精度,并支持全局优化。此外,使用连续四元数场进行运动规划,可以实现可微的碰撞处理。
关键设计:INF-3DP的关键设计包括:1) 使用MLP网络表示隐式神经场,并使用SDF作为监督信号。2) 设计损失函数来编码制造目标,例如,使用惩罚项来避免悬垂结构。3) 使用连续四元数场表示旋转,并使用B样条曲线进行平滑。4) 使用时间变化的SDF进行碰撞检测,并使用惩罚项来避免碰撞。
🖼️ 关键图片


📊 实验亮点
实验结果表明,INF-3DP在刀具路径生成速度上比传统方法快两个数量级,并显著降低了路径点到表面的误差。在复杂的模型上,INF-3DP能够生成无碰撞的刀具路径,并实现高质量的打印效果。通过物理实验验证了该框架在机器人辅助多轴3D打印系统中的有效性。
🎯 应用场景
INF-3DP可应用于机器人辅助的多轴3D打印,尤其适用于制造具有复杂几何形状和高精度要求的零部件,例如航空航天、医疗器械和定制化产品。该框架能够提高打印效率、降低材料成本,并实现更灵活的制造过程。未来,该技术有望推动3D打印在高端制造领域的广泛应用。
📄 摘要(原文)
We introduce a general, scalable computational framework for multi-axis 3D printing based on implicit neural fields (INFs) that unifies all stages of toolpath generation and global collision-free motion planning. In our pipeline, input models are represented as signed distance fields, with fabrication objectives such as support-free printing, surface finish quality, and extrusion control being directly encoded in the optimization of an implicit guidance field. This unified approach enables toolpath optimization across both surface and interior domains, allowing shell and infill paths to be generated via implicit field interpolation. The printing sequence and multi-axis motion are then jointly optimized over a continuous quaternion field. Our continuous formulation constructs the evolving printing object as a time-varying SDF, supporting differentiable global collision handling throughout INF-based motion planning. Compared to explicit-representation-based methods, INF-3DP achieves up to two orders of magnitude speedup and significantly reduces waypoint-to-surface error. We validate our framework on diverse, complex models and demonstrate its efficiency with physical fabrication experiments using a robot-assisted multi-axis system.