Classification of Vision-Based Tactile Sensors: A Review
作者: Haoran Li, Yijiong Lin, Chenghua Lu, Max Yang, Efi Psomopoulou, Nathan F Lepora
分类: cs.RO
发布日期: 2025-09-02 (更新: 2025-09-04)
备注: 15 pages
期刊: IEEE Sensors Journal (2025)
DOI: 10.1109/JSEN.2025.3599236
💡 一句话要点
提出一种基于视觉的触觉传感器分类方法,旨在促进机器人触觉感知技术发展。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉触觉传感器 触觉感知 机器人 传感器分类 标记追踪 图像处理 力感应
📋 核心要点
- 现有基于视觉的触觉传感器设计多样,缺乏统一分类标准,限制了技术交流和发展。
- 论文提出基于标记和强度的两大类传感原理,并细分为四种具体机制,构建了清晰的分类体系。
- 通过比较不同类型传感器的硬件特性和数据解释方法,揭示了当前技术的挑战和未来研究方向。
📝 摘要(中文)
本文提出了一种新颖的基于视觉的触觉传感器(VBTS)分类方法。由于VBTS具有高空间分辨率、低制造成本和易于定制等优点,已被广泛应用于机器人手、夹具和假肢中。尽管VBTS具有共同的设计特征,例如相机模块,但它们的传感原理、材料组成、多模态方法和数据解释方法却千差万别。本文将VBTS技术分为两大类,基于接触到触觉图像的底层转换原理:基于标记的转换原理和基于强度的转换原理。基于标记的转换通过检测标记位移和标记密度变化来解释触觉信息。相比之下,基于强度的转换通过像素值的变化来映射外部扰动。根据接触模块的设计,基于标记的转换可以进一步分为两种亚型:简单标记型(SMB)和形态标记型(MMB)机制。类似地,基于强度的转换原理包括基于反射层型(RLB)和基于透明层型(TLB)机制。本文对这四种类型的传感器的硬件特性进行了比较研究,包括各种组合类型,并讨论了解释触觉信息的常用方法。该比较揭示了VBTS技术目前面临的一些挑战以及未来的研究方向。
🔬 方法详解
问题定义:现有基于视觉的触觉传感器(VBTS)种类繁多,在传感原理、材料、模态和数据解释上存在显著差异,缺乏一个系统性的分类框架。这使得研究人员难以比较和选择合适的传感器,也阻碍了该领域的整体发展。现有方法通常针对特定传感器进行研究,缺乏通用性和可比性。
核心思路:本文的核心思路是根据VBTS将接触转换为触觉图像的底层转换原理进行分类。作者认为,所有VBTS都可以归结为两种主要的转换原理:基于标记的转换和基于强度的转换。这种分类方法抓住了VBTS的本质特征,能够有效地组织和比较不同类型的传感器。
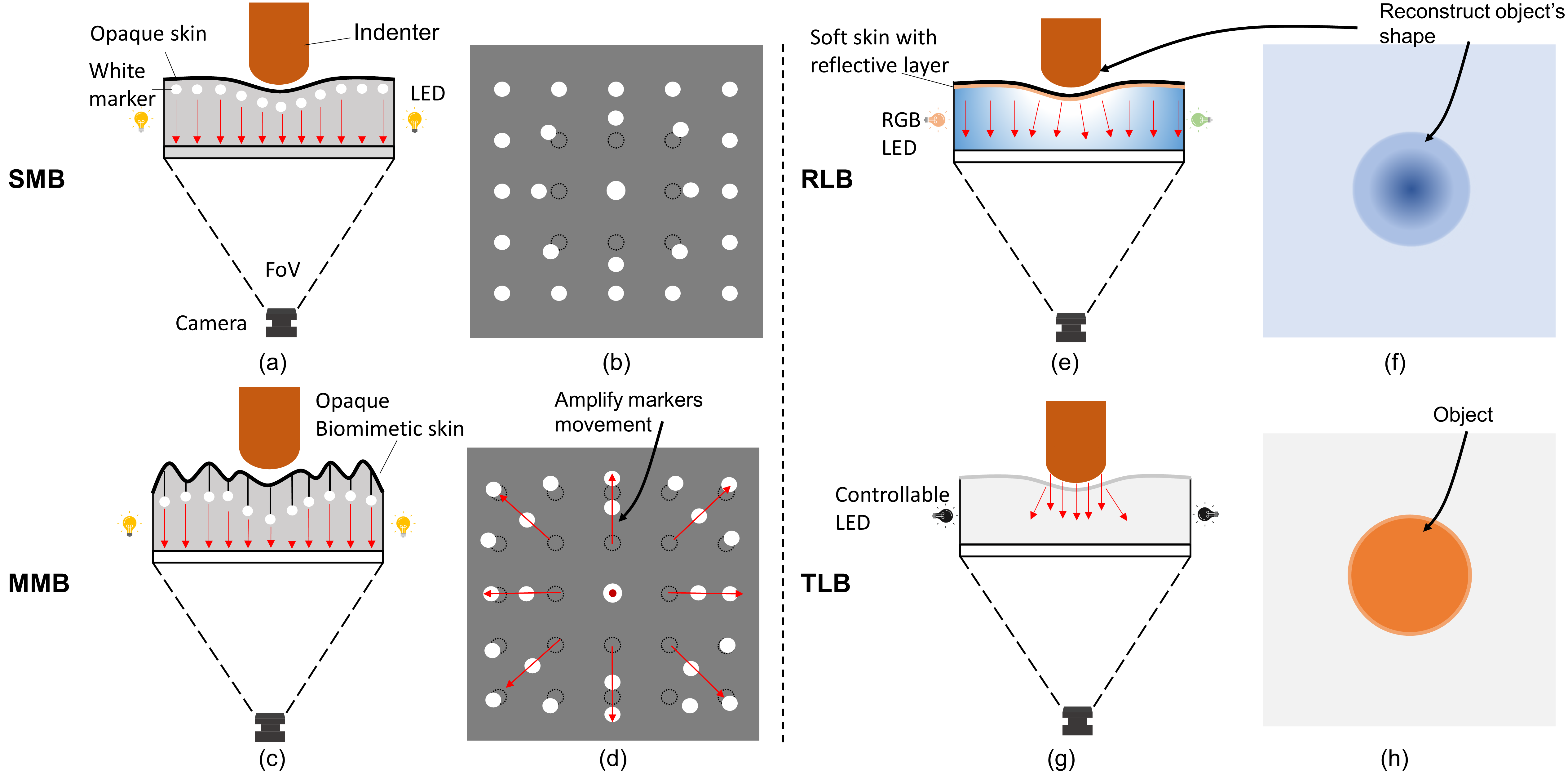
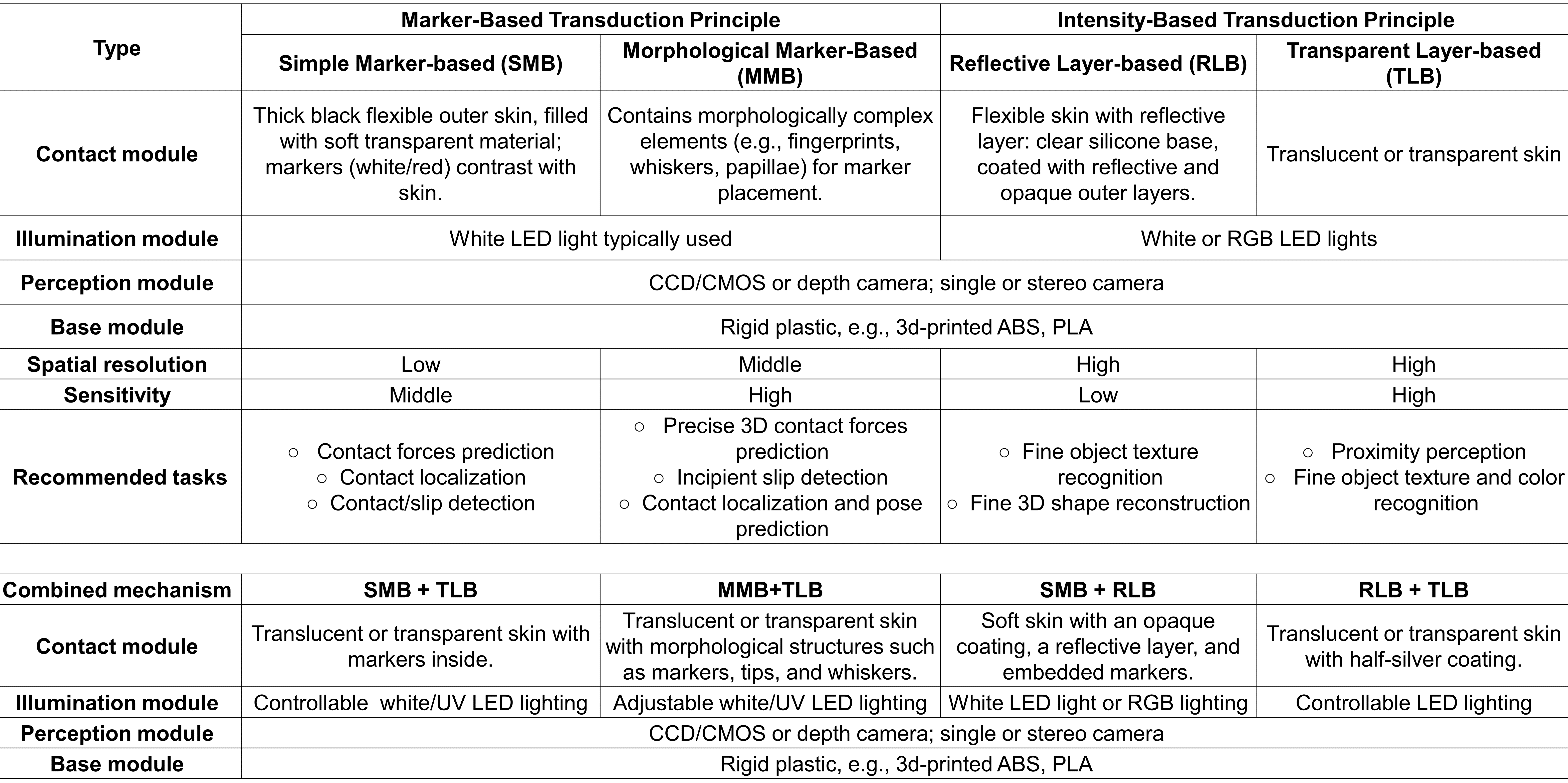
技术框架:该论文提出了一个两层分类框架。第一层将VBTS分为两大类:基于标记的转换(Marker-Based Transduction)和基于强度的转换(Intensity-Based Transduction)。第二层在每一大类下进一步细分:基于标记的转换分为简单标记型(SMB)和形态标记型(MMB),基于强度的转换分为基于反射层型(RLB)和基于透明层型(TLB)。论文随后对这四种类型的传感器的硬件特性、数据解释方法以及优缺点进行了详细的比较分析。
关键创新:该论文最重要的技术创新在于提出了基于底层转换原理的VBTS分类方法。这种分类方法不仅能够有效地组织现有VBTS,而且能够指导新型VBTS的设计和开发。与现有方法相比,该分类方法更加通用和系统化,能够更好地促进该领域的研究和发展。
关键设计:论文的关键设计在于对四种类型的VBTS进行了详细的硬件特性分析,包括相机类型、光源、接触材料、标记设计等。此外,论文还对各种数据解释方法进行了比较,包括图像处理算法、机器学习模型等。这些分析为研究人员选择合适的VBTS和开发有效的数据解释方法提供了重要的参考。
🖼️ 关键图片

📊 实验亮点
论文通过对四种主要VBTS类型(SMB, MMB, RLB, TLB)的硬件特性和数据处理方法进行对比分析,总结了各类传感器的优势与局限性。例如,基于标记的传感器在高分辨率和形变测量方面表现出色,而基于强度的传感器在力感应方面更具优势。这些结论为未来的传感器设计提供了指导。
🎯 应用场景
该研究成果可应用于机器人灵巧操作、假肢触觉反馈、虚拟现实交互等领域。通过提供清晰的传感器分类,有助于工程师根据具体应用需求选择合适的触觉传感器,并加速相关产品的研发进程。未来,该分类方法有望促进触觉感知技术的标准化和模块化。
📄 摘要(原文)
Vision-based tactile sensors (VBTS) have gained widespread application in robotic hands, grippers and prosthetics due to their high spatial resolution, low manufacturing costs, and ease of customization. While VBTSs have common design features, such as a camera module, they can differ in a rich diversity of sensing principles, material compositions, multimodal approaches, and data interpretation methods. Here, we propose a novel classification of VBTS that categorizes the technology into two primary sensing principles based on the underlying transduction of contact into a tactile image: the Marker-Based Transduction Principle and the Intensity-Based Transduction Principle. Marker-Based Transduction interprets tactile information by detecting marker displacement and changes in marker density. In contrast, Intensity-Based Transduction maps external disturbances with variations in pixel values. Depending on the design of the contact module, Marker-Based Transduction can be further divided into two subtypes: Simple Marker-Based (SMB) and Morphological Marker-Based (MMB) mechanisms. Similarly, the Intensity-Based Transduction Principle encompasses the Reflective Layer-based (RLB) and Transparent Layer-Based (TLB) mechanisms. This paper provides a comparative study of the hardware characteristics of these four types of sensors including various combination types, and discusses the commonly used methods for interpreting tactile information. This~comparison reveals some current challenges faced by VBTS technology and directions for future research.