U-ARM : Ultra low-cost general teleoperation interface for robot manipulation
作者: Yanwen Zou, Zhaoye Zhou, Chenyang Shi, Zewei Ye, Junda Huang, Yan Ding, Bo Zhao
分类: cs.RO
发布日期: 2025-09-02 (更新: 2025-10-17)
🔗 代码/项目: GITHUB
💡 一句话要点
提出一种超低成本通用遥操作界面U-Arm,用于机器人操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作 机器人手臂 低成本 3D打印 leader-follower 机器人控制 开源硬件
📋 核心要点
- 现有遥操作界面成本高昂或兼容性差,限制了其在机器人操作中的广泛应用。
- U-Arm通过低成本3D打印leader手臂和优化的控制逻辑,实现了与多种商用机器人手臂的兼容。
- 实验表明,U-Arm在数据收集效率和任务成功率上优于现有低成本遥操作方案,并开源了相关数据和模型。
📝 摘要(中文)
本文提出了一种低成本且快速适应的leader-follower遥操作框架U-Arm,旨在与大多数商用机器人手臂连接。该系统支持通过三种结构不同的3D打印leader手臂进行遥操作,这些手臂共享一致的控制逻辑,从而与各种商用机器人配置无缝兼容。与之前的开源leader-follower界面相比,我们进一步优化了机械设计和舵机选择,使得6自由度leader手臂的材料清单(BOM)成本仅为50.5美元,7自由度版本的成本为56.8美元。为了提高可用性,我们通过机械和控制优化来缓解控制冗余自由度时遇到的常见挑战。实验结果表明,与另一种低成本遥操作界面Joycon相比,U-Arm在多个操作场景中实现了高39%的数据收集效率和相当的任务成功率。我们已经开源了三种配置的所有CAD模型,并提供了用于验证遥操作工作流程的仿真支持。我们还开源了使用U-Arm收集的真实世界操作数据。项目网站是https://github.com/MINT-SJTU/LeRobot-Anything-U-Arm。
🔬 方法详解
问题定义:现有商用机器人手臂的遥操作界面通常成本较高,限制了其在教育、研究和小型企业中的应用。同时,已有的开源遥操作界面在机械设计和控制优化方面存在不足,导致操作效率和任务成功率较低。此外,控制冗余自由度也是一个挑战。
核心思路:U-Arm的核心思路是设计一种低成本、易于制造和使用的leader-follower遥操作系统。通过3D打印leader手臂,并优化机械结构和舵机选择,显著降低了硬件成本。同时,采用一致的控制逻辑,实现了与多种商用机器人手臂的兼容。通过机械和控制优化,缓解了冗余自由度控制的难题。
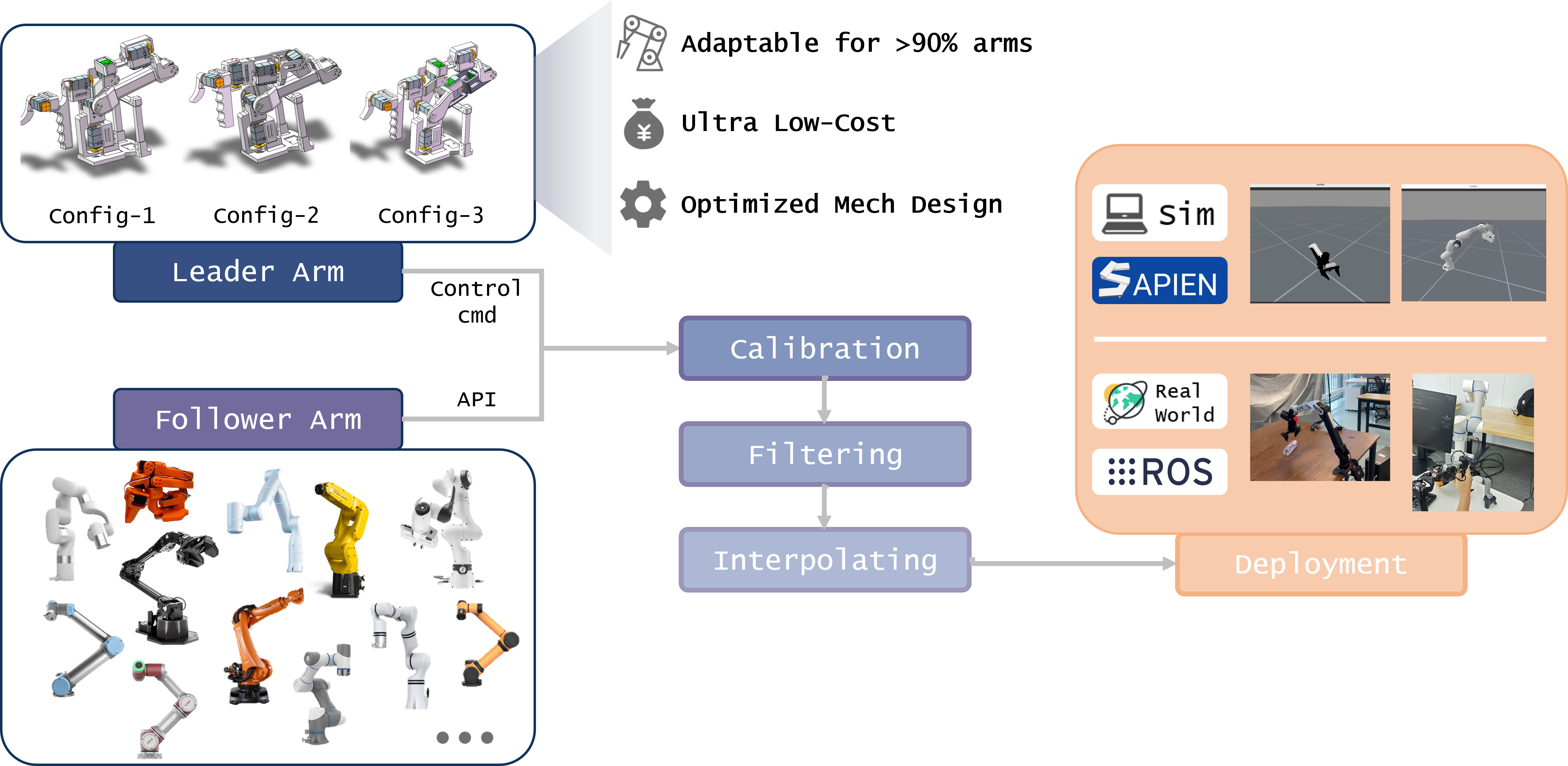
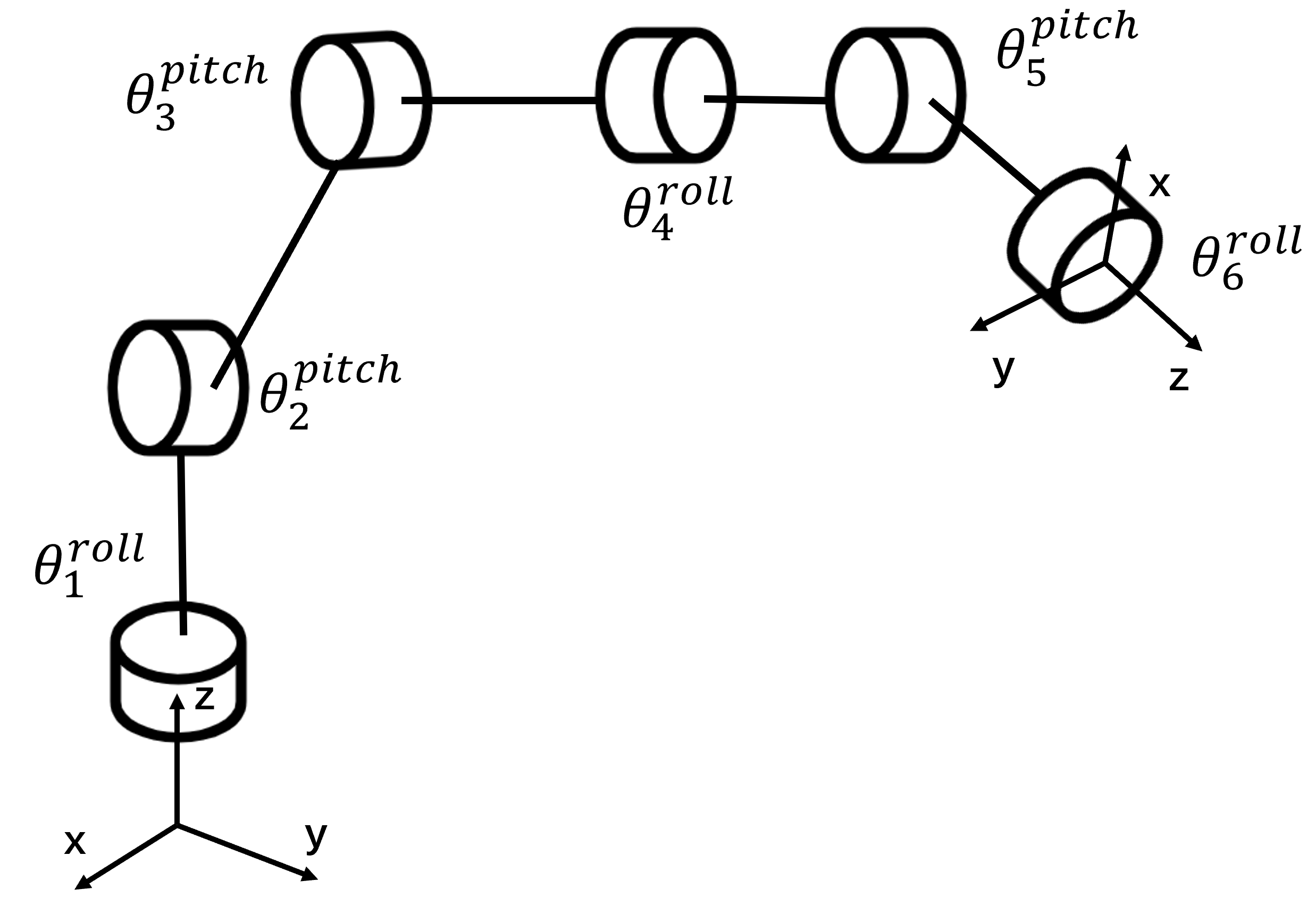
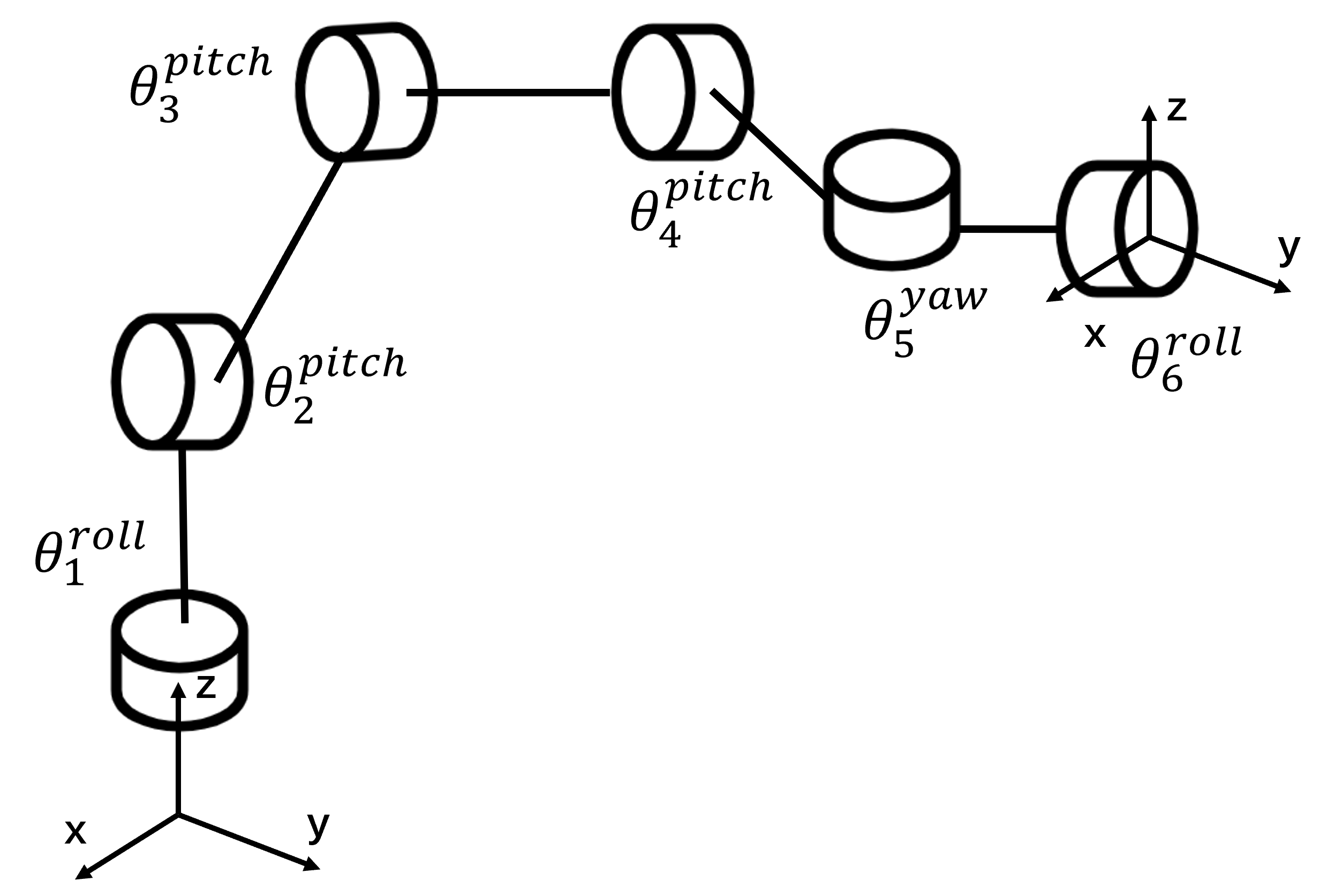
技术框架:U-Arm系统主要包含三个部分:3D打印的leader手臂、控制系统和follower机器人手臂。用户通过操作leader手臂,控制信号传递给控制系统,控制系统再将指令发送给follower机器人手臂,实现遥操作。系统支持多种leader手臂配置(6自由度和7自由度),并提供了仿真环境用于验证遥操作流程。
关键创新:U-Arm的关键创新在于其超低的硬件成本和高度的兼容性。通过优化机械设计和舵机选择,显著降低了leader手臂的制造成本。同时,采用一致的控制逻辑,实现了与多种商用机器人手臂的无缝连接。此外,开源了CAD模型、仿真环境和真实世界操作数据,方便其他研究者使用和改进。
关键设计:U-Arm的关键设计包括:1) 3D打印的leader手臂的机械结构设计,需要保证足够的强度和灵活性;2) 舵机的选择,需要在成本和性能之间进行权衡;3) 控制算法的设计,需要保证操作的精度和稳定性;4) 仿真环境的搭建,需要尽可能真实地模拟真实世界的环境。
🖼️ 关键图片
📊 实验亮点
实验结果表明,U-Arm在多个操作场景中实现了比Joycon高39%的数据收集效率,并且在任务成功率上与Joycon相当。这表明U-Arm在低成本遥操作界面中具有显著的优势。此外,U-Arm的材料清单成本仅为50.5美元(6自由度)和56.8美元(7自由度),远低于其他同类产品。
🎯 应用场景
U-Arm具有广泛的应用前景,包括机器人教育、远程医疗、危险环境下的机器人操作等。其低成本和易用性使其能够被广泛应用于教育领域,帮助学生学习机器人操作和控制。在远程医疗领域,医生可以通过U-Arm远程控制机器人进行手术或诊断。在危险环境中,U-Arm可以用于远程控制机器人进行排爆、救援等任务,降低人员伤亡风险。
📄 摘要(原文)
We propose U-Arm, a low-cost and rapidly adaptable leader-follower teleoperation framework designed to interface with most of commercially available robotic arms. Our system supports teleoperation through three structurally distinct 3D-printed leader arms that share consistent control logic, enabling seamless compatibility with diverse commercial robot configurations. Compared with previous open-source leader-follower interfaces, we further optimized both the mechanical design and servo selection, achieving a bill of materials (BOM) cost of only \$50.5 for the 6-DoF leader arm and \$56.8 for the 7-DoF version. To enhance usability, we mitigate the common challenge in controlling redundant degrees of freedom by %engineering methods mechanical and control optimizations. Experimental results demonstrate that U-Arm achieves 39\% higher data collection efficiency and comparable task success rates across multiple manipulation scenarios compared with Joycon, another low-cost teleoperation interface. We have open-sourced all CAD models of three configs and also provided simulation support for validating teleoperation workflows. We also open-sourced real-world manipulation data collected with U-Arm. The project website is https://github.com/MINT-SJTU/LeRobot-Anything-U-Arm.