FGO-SLAM: Enhancing Gaussian SLAM with Globally Consistent Opacity Radiance Field
作者: Fan Zhu, Yifan Zhao, Ziyu Chen, Biao Yu, Hui Zhu
分类: cs.RO
发布日期: 2025-09-01
备注: ICRA 2025
💡 一句话要点
FGO-SLAM:利用全局一致的不透明度辐射场增强高斯SLAM的几何重建性能
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 视觉SLAM 高斯SLAM 不透明度辐射场 三维重建 全局优化
📋 核心要点
- 传统SLAM在高质量场景重建方面存在不足,高斯SLAM缺乏有效的位姿优化方法和几何重建能力。
- FGO-SLAM利用不透明度辐射场作为场景表示,通过全局调整优化位姿和点云,提升跟踪鲁棒性。
- 该方法维护全局一致的3D高斯不透明度辐射场,并引入深度失真和法线一致性项来优化场景表示。
📝 摘要(中文)
视觉SLAM因其为具身智能提供感知能力和仿真测试数据而备受关注。然而,传统SLAM方法难以满足高质量场景重建的需求。高斯SLAM系统虽然具有快速渲染和高质量映射能力,但缺乏有效的位姿优化方法,并且在几何重建方面面临挑战。为了解决这些问题,我们提出了FGO-SLAM,一种高斯SLAM系统,它采用不透明度辐射场作为场景表示,以增强几何映射性能。在初始位姿估计后,我们应用全局调整来优化相机位姿和稀疏点云,确保我们方法的鲁棒跟踪。此外,我们维护一个基于3D高斯函数的全局一致的不透明度辐射场,并引入深度失真和法线一致性项来细化场景表示。更进一步,在构建四面体网格后,我们识别水平集以直接从3D高斯函数中提取表面。在各种真实世界和大规模合成数据集上的结果表明,我们的方法实现了最先进的跟踪精度和映射性能。
🔬 方法详解
问题定义:现有SLAM方法,特别是高斯SLAM,在几何重建方面存在不足,缺乏有效的位姿优化方法,导致重建质量不高。传统方法难以兼顾高质量的场景重建和快速的渲染能力。
核心思路:FGO-SLAM的核心思路是利用不透明度辐射场来增强高斯SLAM的几何重建能力。通过将场景表示为不透明度辐射场,并结合全局优化策略,可以更准确地估计相机位姿和场景几何结构。
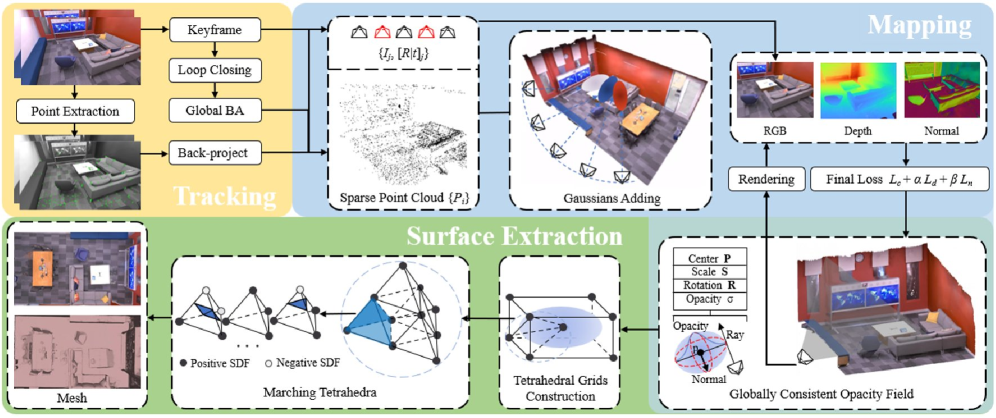
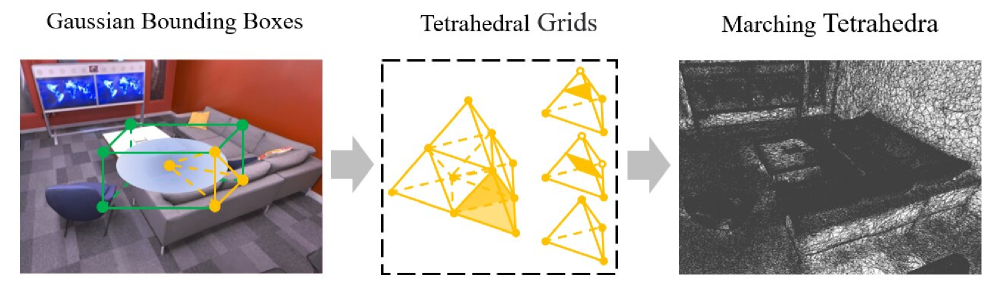
技术框架:FGO-SLAM的整体框架包括以下几个主要阶段:1) 初始位姿估计;2) 全局调整,优化相机位姿和稀疏点云;3) 基于3D高斯函数维护全局一致的不透明度辐射场;4) 引入深度失真和法线一致性项来细化场景表示;5) 构建四面体网格,并提取水平集以获得表面。
关键创新:该方法最重要的创新点在于将不透明度辐射场与高斯SLAM相结合,并引入了全局优化策略。通过维护全局一致的不透明度辐射场,可以更有效地利用场景信息,从而提高几何重建的精度和鲁棒性。此外,深度失真和法线一致性项的引入进一步提升了场景表示的质量。
关键设计:该方法的关键设计包括:1) 使用3D高斯函数表示不透明度辐射场;2) 设计深度失真和法线一致性损失函数,用于优化场景表示;3) 利用四面体网格和水平集提取表面,实现高效的几何重建。具体的参数设置和网络结构在论文中应该有详细描述(未知)。
🖼️ 关键图片
📊 实验亮点
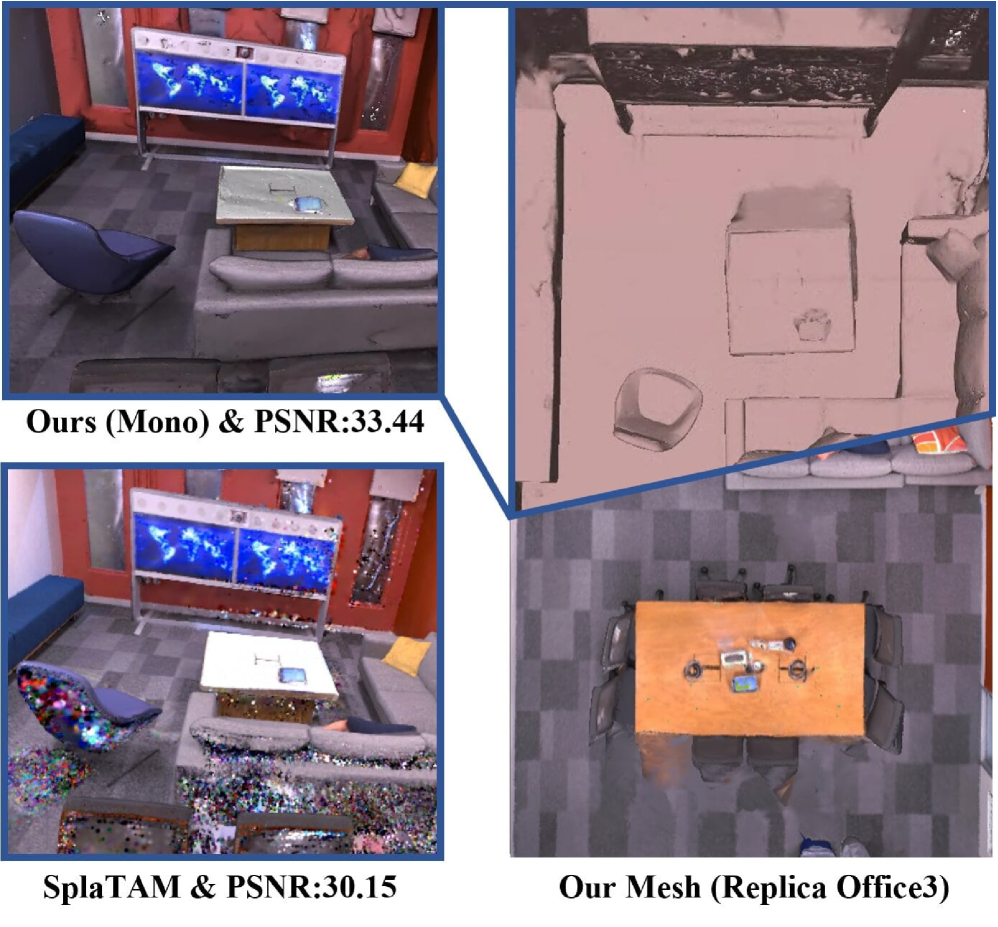
实验结果表明,FGO-SLAM在多个真实世界和大规模合成数据集上实现了最先进的跟踪精度和映射性能。具体的性能数据和对比基线需要在论文中查找(未知)。该方法在几何重建质量和跟踪鲁棒性方面均优于现有方法。
🎯 应用场景
FGO-SLAM具有广泛的应用前景,包括机器人导航、虚拟现实、增强现实、三维地图构建等领域。该方法可以为机器人提供更准确的环境感知能力,从而实现更智能的自主导航。同时,高质量的场景重建结果可以用于创建逼真的虚拟环境,提升VR/AR体验。此外,该方法还可以应用于城市建模、文物保护等领域。
📄 摘要(原文)
Visual SLAM has regained attention due to its ability to provide perceptual capabilities and simulation test data for Embodied AI. However, traditional SLAM methods struggle to meet the demands of high-quality scene reconstruction, and Gaussian SLAM systems, despite their rapid rendering and high-quality mapping capabilities, lack effective pose optimization methods and face challenges in geometric reconstruction. To address these issues, we introduce FGO-SLAM, a Gaussian SLAM system that employs an opacity radiance field as the scene representation to enhance geometric mapping performance. After initial pose estimation, we apply global adjustment to optimize camera poses and sparse point cloud, ensuring robust tracking of our approach. Additionally, we maintain a globally consistent opacity radiance field based on 3D Gaussians and introduce depth distortion and normal consistency terms to refine the scene representation. Furthermore, after constructing tetrahedral grids, we identify level sets to directly extract surfaces from 3D Gaussians. Results across various real-world and large-scale synthetic datasets demonstrate that our method achieves state-of-the-art tracking accuracy and mapping performance.