Scaling Fabric-Based Piezoresistive Sensor Arrays for Whole-Body Tactile Sensing
作者: Curtis C. Johnson, Daniel Webb, David Hill, Marc D. Killpack
分类: cs.RO, eess.SP
发布日期: 2025-08-28
备注: In submission to IEEE Sensors
💡 一句话要点
提出基于柔性织物压阻传感器阵列和菊花链SPI总线的全身触觉感知方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉感知 柔性传感器 压阻传感器 SPI总线 全身控制
📋 核心要点
- 全身触觉感知面临布线复杂、数据吞吐量和系统可靠性等挑战,限制了机器人操作的鲁棒性。
- 论文提出一种基于织物压阻传感器阵列和菊花链SPI总线的架构,降低串扰并简化布线。
- 实验结果表明,该系统能以超过50FPS的速率从8000多个触觉单元获取数据,并成功应用于全身抓取任务。
📝 摘要(中文)
为了实现稳健的全身操作,扩展触觉感知能力面临着布线复杂性、数据吞吐量和系统可靠性的挑战。本文提出了一种完整的架构来克服这些障碍。该方法将开源的织物传感器与定制的读出电路相结合,通过硬件缓解将信号串扰降低到3.3%以下。关键在于,我们引入了一种新颖的菊花链SPI总线拓扑,避免了常用无线协议的实际限制以及基于USB集线器系统的复杂布线。该架构以超过50 FPS的更新速率,从超过1平方米的传感区域中的8000多个触觉单元流式传输同步数据,验证了其适用于实时控制。通过全身抓取任务验证了系统的有效性,在没有反馈的情况下,机器人的开环轨迹导致了不可控的力施加,缓慢地压碎了一个可变形的纸板箱。通过实时触觉反馈,机器人将此运动转变为轻柔、稳定的抓取,成功地操纵物体而不会造成结构性损坏。这项工作提供了一个稳健且经过充分表征的平台,以支持未来在高级全身控制和物理人机交互方面的研究。
🔬 方法详解
问题定义:现有全身触觉感知系统面临的主要问题是传感器数量增加带来的布线复杂性,以及由此导致的数据吞吐量瓶颈和系统可靠性问题。传统的无线方案存在延迟和带宽限制,而基于USB集线器的方案则布线过于复杂,难以扩展到全身尺度。因此,需要一种能够支持大量传感器、高数据速率和低延迟的触觉感知架构。
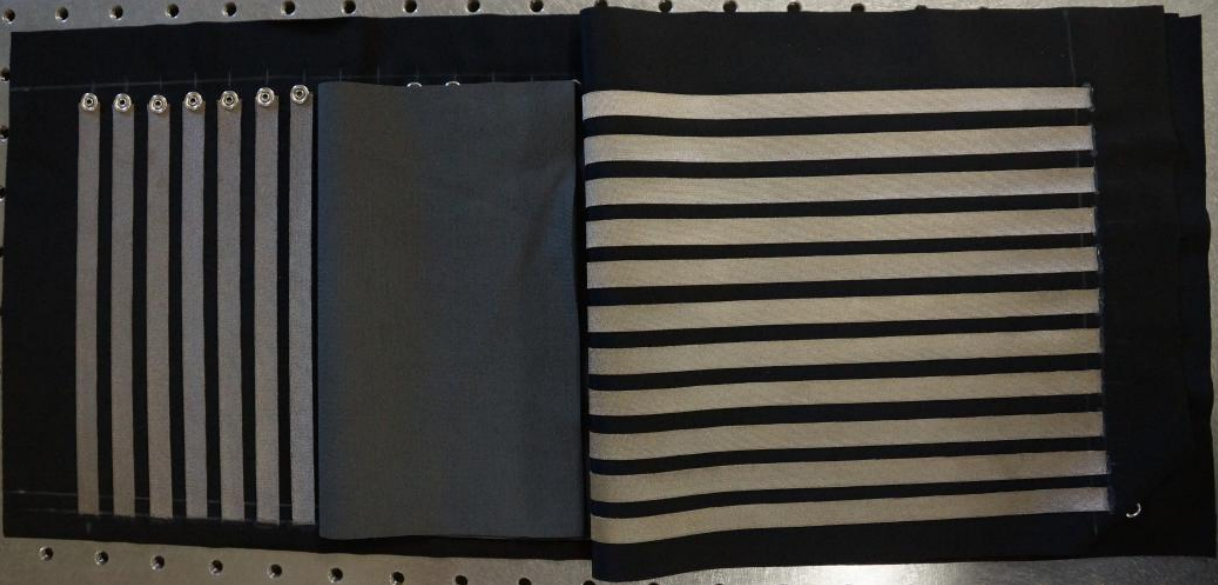
核心思路:本文的核心思路是利用织物基压阻传感器阵列实现大面积的触觉感知,并采用定制的读出电路和菊花链SPI总线拓扑来解决布线复杂性和数据吞吐量问题。通过硬件层面的串扰抑制和高效的数据传输协议,实现实时、高分辨率的全身触觉感知。
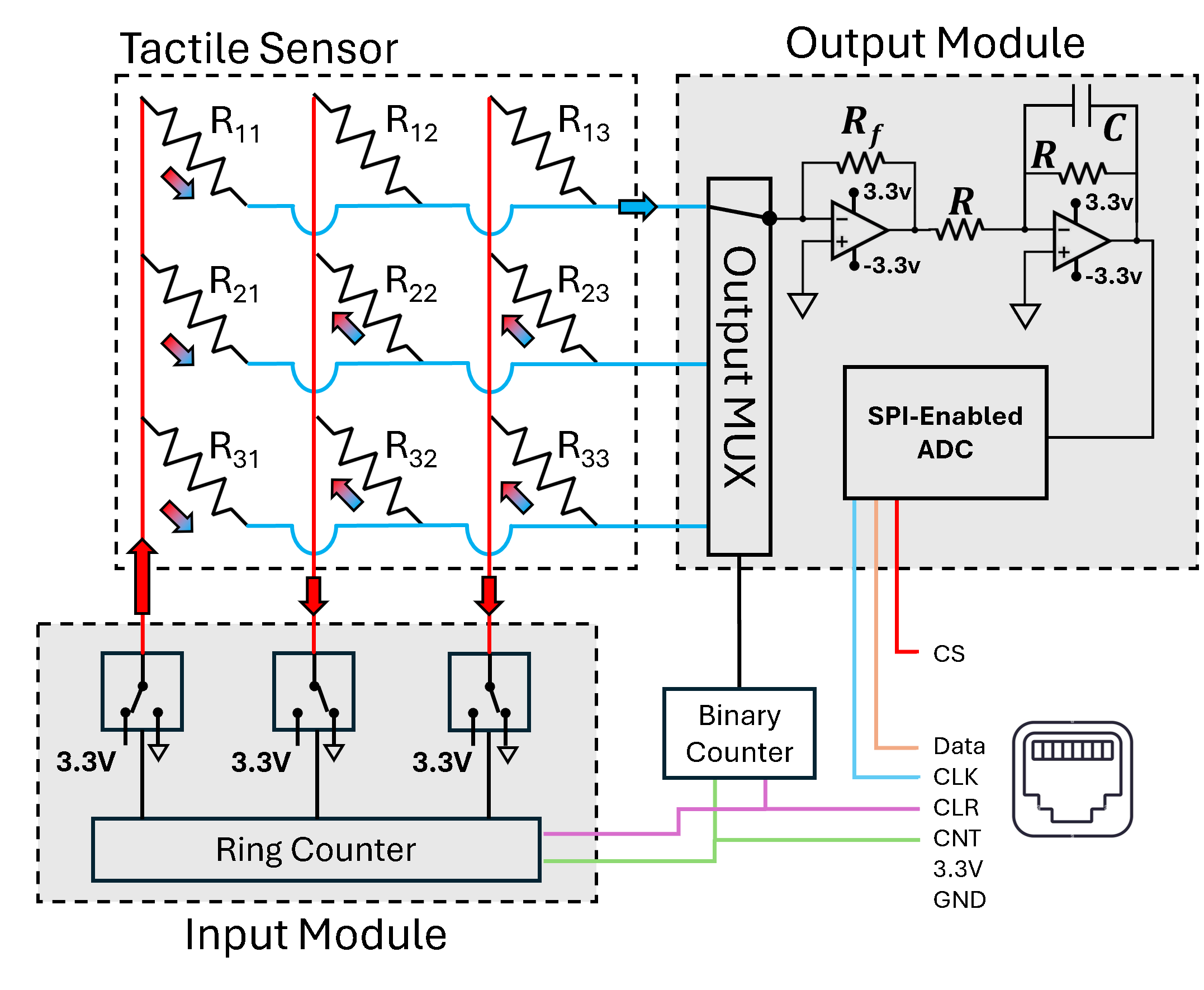
技术框架:该系统的整体架构包括三个主要部分:1) 织物基压阻传感器阵列,用于感知触觉信息;2) 定制的读出电路,用于将传感器信号转换为数字信号,并进行串扰抑制;3) 菊花链SPI总线,用于将多个读出电路连接在一起,并将数据传输到主控制器。整个系统能够以超过50FPS的速率,从超过1平方米的传感区域中的8000多个触觉单元流式传输同步数据。
关键创新:该论文最重要的技术创新点在于采用了菊花链SPI总线拓扑,有效地解决了大规模触觉感知系统的布线复杂性和数据吞吐量问题。与传统的无线方案和USB集线器方案相比,菊花链SPI总线具有更高的带宽、更低的延迟和更简单的布线方式,使其能够支持更大规模的传感器阵列和更高的采样速率。此外,硬件层面的串扰抑制也是一个重要的创新点,能够提高触觉感知的准确性和可靠性。
关键设计:在传感器设计方面,采用了织物基压阻材料,具有良好的柔性和可扩展性。在读出电路设计方面,采用了差分放大器和滤波器来降低噪声和串扰。在SPI总线设计方面,采用了高速SPI接口和优化的数据传输协议,以实现高数据速率和低延迟。具体的参数设置和网络结构等技术细节在论文中进行了详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该系统能够以超过50 FPS的速率,从超过1平方米的传感区域中的8000多个触觉单元流式传输同步数据。在全身抓取任务中,通过实时触觉反馈,机器人能够将原本会压碎纸箱的动作转变为轻柔、稳定的抓取,成功地操纵物体而不会造成结构性损坏。信号串扰被降低到3.3%以下。
🎯 应用场景
该研究成果可应用于机器人全身控制、人机交互、康复医疗等领域。例如,可以利用全身触觉感知提高机器人在复杂环境中的操作能力,实现更安全、更自然的物理人机交互,以及为康复患者提供更精准的触觉反馈训练。
📄 摘要(原文)
Scaling tactile sensing for robust whole-body manipulation is a significant challenge, often limited by wiring complexity, data throughput, and system reliability. This paper presents a complete architecture designed to overcome these barriers. Our approach pairs open-source, fabric-based sensors with custom readout electronics that reduce signal crosstalk to less than 3.3% through hardware-based mitigation. Critically, we introduce a novel, daisy-chained SPI bus topology that avoids the practical limitations of common wireless protocols and the prohibitive wiring complexity of USB hub-based systems. This architecture streams synchronized data from over 8,000 taxels across 1 square meter of sensing area at update rates exceeding 50 FPS, confirming its suitability for real-time control. We validate the system's efficacy in a whole-body grasping task where, without feedback, the robot's open-loop trajectory results in an uncontrolled application of force that slowly crushes a deformable cardboard box. With real-time tactile feedback, the robot transforms this motion into a gentle, stable grasp, successfully manipulating the object without causing structural damage. This work provides a robust and well-characterized platform to enable future research in advanced whole-body control and physical human-robot interaction.