Uncertainty Aware-Predictive Control Barrier Functions: Safer Human Robot Interaction through Probabilistic Motion Forecasting
作者: Lorenzo Busellato, Federico Cunico, Diego Dall'Alba, Marco Emporio, Andrea Giachetti, Riccardo Muradore, Marco Cristani
分类: cs.RO, cs.AI
发布日期: 2025-08-28
💡 一句话要点
提出不确定性感知预测控制障碍函数,通过概率运动预测实现更安全的人机交互。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人机交互 运动预测 控制障碍函数 不确定性感知 机器人安全
📋 核心要点
- 现有方法在人机协作中,对人类运动预测的不确定性处理不足,导致机器人行为过于保守,影响任务效率。
- 提出UA-PCBFs框架,融合概率人类运动预测与控制障碍函数,动态调整安全裕度,提升人机交互的流畅性。
- 通过真实实验验证,UA-PCBFs在任务关键指标上优于现有HRI架构,显著减少了机器人安全空间被侵犯的次数。
📝 摘要(中文)
为了在人与机器人共享工作空间的场景中实现灵活、高吞吐量的自动化,协作机器人单元必须兼顾严格的安全保证和响应迅速、高效行为的需求。动态障碍是人类运动的随机性、任务依赖性变化。当机器人依赖纯粹的反应式或最坏情况包络时,它们会不必要地制动,阻碍任务进度,并破坏真正的人机交互所需的流畅性。近年来,基于学习的人类运动预测发展迅速,但大多数方法产生的是最坏情况预测,通常没有以结构良好的方式处理预测不确定性,导致过度保守的规划算法,限制了其灵活性。我们引入了不确定性感知预测控制障碍函数(UA-PCBFs),这是一个统一的框架,它将概率人类手部运动预测与控制障碍函数的正式安全保证融合在一起。与其他变体相比,我们的框架允许动态调整安全裕度,这得益于预测模块提供的人类运动不确定性估计。由于不确定性估计,UA-PCBFs使协作机器人能够更深入地了解未来的人类状态,通过知情的运动规划促进更流畅和智能的交互。我们通过全面的真实世界实验验证了UA-PCBFs,实验的真实性不断提高,包括使用机器人手进行自动化设置(以执行完全可重复的运动)和直接的人机交互(以验证及时性、可用性和人类信心)。相对于最先进的HRI架构,UA-PCBFs在任务关键指标方面表现更好,与最先进技术相比,显著减少了人机交互期间机器人安全空间被侵犯的次数。
🔬 方法详解
问题定义:论文旨在解决人机协作场景中,由于人类运动的随机性和预测不确定性,导致机器人行为过于保守的问题。现有方法通常采用最坏情况预测,忽略了预测的不确定性,使得机器人在规划路径时过于谨慎,影响了任务效率和人机交互的流畅性。
核心思路:论文的核心思路是利用概率运动预测来估计人类运动的不确定性,并将其融入到控制障碍函数中,从而动态调整机器人的安全裕度。通过考虑预测的不确定性,机器人可以在保证安全的前提下,更加灵活地规划路径,提高任务效率和人机交互的流畅性。
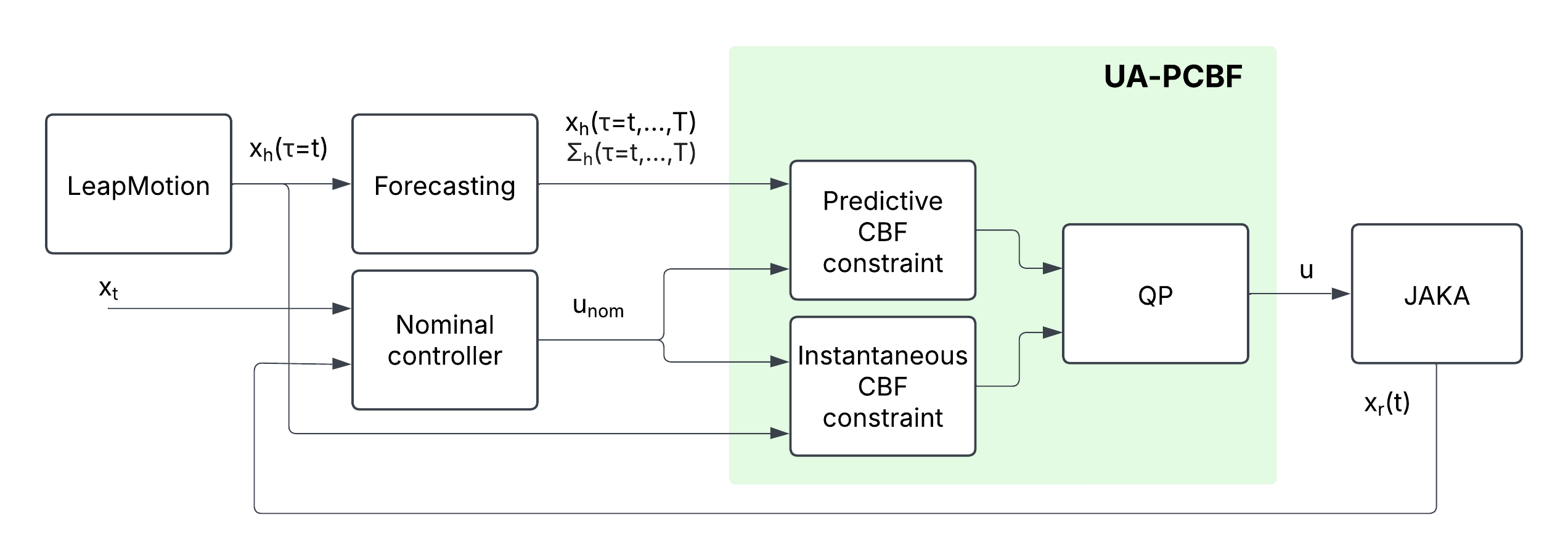
技术框架:UA-PCBFs框架主要包含两个模块:概率人类运动预测模块和不确定性感知预测控制障碍函数模块。首先,概率人类运动预测模块负责预测人类手部运动的未来轨迹,并估计预测的不确定性。然后,不确定性感知预测控制障碍函数模块利用预测的轨迹和不确定性信息,动态调整机器人的安全裕度,并生成安全的控制指令。整体流程是:人类运动 -> 概率运动预测 -> 不确定性估计 -> UA-PCBF -> 机器人控制。
关键创新:该论文的关键创新在于提出了不确定性感知的控制障碍函数(UA-PCBFs)。与传统的控制障碍函数相比,UA-PCBFs能够根据人类运动预测的不确定性动态调整安全裕度,从而在保证安全的前提下,提高机器人的灵活性和任务效率。本质区别在于,传统方法采用静态的安全裕度,而UA-PCBFs采用动态的安全裕度,能够更好地适应人类运动的不确定性。
关键设计:论文的关键设计包括:1) 使用概率模型(具体模型未知)进行人类运动预测,并输出预测轨迹的均值和方差,用于表示预测的不确定性。2) 将预测的不确定性融入到控制障碍函数中,通过调整控制障碍函数的参数,动态调整安全裕度。3) 具体的损失函数和网络结构未知,但可以推测损失函数可能包含安全约束项和任务目标项,网络结构可能包含用于运动预测的循环神经网络或Transformer。
🖼️ 关键图片

📊 实验亮点
实验结果表明,UA-PCBFs在任务关键指标方面优于现有HRI架构,显著减少了人机交互期间机器人安全空间被侵犯的次数。具体性能数据未知,但论文强调了在真实世界实验中,UA-PCBFs能够更好地平衡安全性和任务效率,提高了人机交互的流畅性和人类的信心。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:工业自动化、医疗康复、家庭服务等。通过提高人机交互的安全性、流畅性和效率,可以显著提升生产力、改善用户体验,并促进人机协作的广泛应用。未来,该技术有望应用于更复杂的机器人系统,例如:自动驾驶汽车、无人机等。
📄 摘要(原文)
To enable flexible, high-throughput automation in settings where people and robots share workspaces, collaborative robotic cells must reconcile stringent safety guarantees with the need for responsive and effective behavior. A dynamic obstacle is the stochastic, task-dependent variability of human motion: when robots fall back on purely reactive or worst-case envelopes, they brake unnecessarily, stall task progress, and tamper with the fluidity that true Human-Robot Interaction demands. In recent years, learning-based human-motion prediction has rapidly advanced, although most approaches produce worst-case scenario forecasts that often do not treat prediction uncertainty in a well-structured way, resulting in over-conservative planning algorithms, limiting their flexibility. We introduce Uncertainty-Aware Predictive Control Barrier Functions (UA-PCBFs), a unified framework that fuses probabilistic human hand motion forecasting with the formal safety guarantees of Control Barrier Functions. In contrast to other variants, our framework allows for dynamic adjustment of the safety margin thanks to the human motion uncertainty estimation provided by a forecasting module. Thanks to uncertainty estimation, UA-PCBFs empower collaborative robots with a deeper understanding of future human states, facilitating more fluid and intelligent interactions through informed motion planning. We validate UA-PCBFs through comprehensive real-world experiments with an increasing level of realism, including automated setups (to perform exactly repeatable motions) with a robotic hand and direct human-robot interactions (to validate promptness, usability, and human confidence). Relative to state-of-the-art HRI architectures, UA-PCBFs show better performance in task-critical metrics, significantly reducing the number of violations of the robot's safe space during interaction with respect to the state-of-the-art.