GelSLAM: A Real-time, High-Fidelity, and Robust 3D Tactile SLAM System
作者: Hung-Jui Huang, Mohammad Amin Mirzaee, Michael Kaess, Wenzhen Yuan
分类: cs.RO, cs.CV
发布日期: 2025-08-21
备注: 18 pages
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
GelSLAM:一种实时、高保真、鲁棒的3D触觉SLAM系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉SLAM 三维重建 机器人操作 表面法线 曲率 实时系统 高精度 触觉感知
📋 核心要点
- 精确感知物体的姿态和形状对于精确抓取和操作至关重要,但传统视觉方法易受遮挡影响。
- GelSLAM利用触觉传感器获取的表面法线和曲率信息,实现鲁棒的物体跟踪和形状重建。
- 实验表明,GelSLAM能够实时跟踪物体运动,并以亚毫米级的精度重建物体形状,即使对于低纹理物体也有效。
📝 摘要(中文)
本文提出了一种名为GelSLAM的实时3D SLAM系统,该系统仅依赖触觉传感,即可长时间估计物体的姿态并高保真地重建物体形状。与传统的基于点云的方法不同,GelSLAM利用触觉导出的表面法线和曲率进行鲁棒的跟踪和回环检测。该系统能够以低误差和最小漂移实时跟踪物体的运动,并以亚毫米级的精度重建形状,即使对于木制工具等低纹理物体也是如此。GelSLAM将触觉传感扩展到局部接触之外,实现了全局、长期的空间感知,我们相信它将为许多涉及手中物体交互的精确操作任务奠定基础。
🔬 方法详解
问题定义:现有的SLAM方法主要依赖视觉信息,但在物体被遮挡或纹理信息不足的情况下,性能会显著下降。尤其是在手部操作等精细操作场景中,遮挡问题更为突出。因此,需要一种能够克服遮挡和纹理依赖的SLAM系统,以实现更精确的物体姿态估计和形状重建。
核心思路:GelSLAM的核心思路是利用触觉传感器获取的物体表面法线和曲率信息,代替传统的点云信息。触觉传感器可以直接感知物体表面的几何特征,不受光照和遮挡的影响。通过对触觉数据进行处理,可以提取出稳定的表面法线和曲率信息,用于物体跟踪和地图构建。
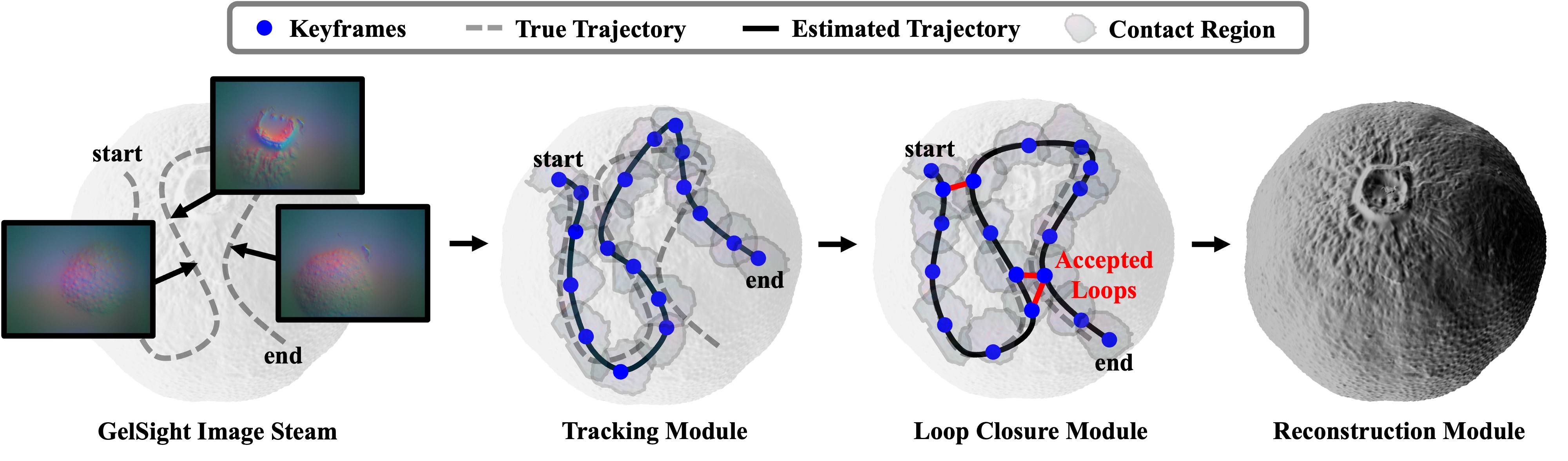
技术框架:GelSLAM系统主要包含以下几个模块:1) 触觉数据采集模块:使用触觉传感器获取物体表面的触觉数据。2) 特征提取模块:从触觉数据中提取表面法线和曲率等几何特征。3) 跟踪模块:利用提取的几何特征,采用迭代最近点(ICP)等算法,估计物体在连续帧之间的运动。4) 地图构建模块:将每一帧的物体姿态和几何特征融合到全局地图中,实现物体的形状重建。5) 回环检测模块:检测到重复访问的区域,消除累积误差,提高地图的精度。
关键创新:GelSLAM最重要的创新在于使用触觉导出的表面法线和曲率信息进行SLAM。与传统的基于点云的SLAM方法相比,GelSLAM对光照和遮挡具有更强的鲁棒性,能够在低纹理环境下实现高精度的物体跟踪和形状重建。此外,GelSLAM还实现了实时的性能,使其能够应用于实际的机器人操作任务。
关键设计:GelSLAM的关键设计包括:1) 使用高分辨率的触觉传感器,以获取更精确的表面几何信息。2) 采用卡尔曼滤波等方法,对物体姿态进行平滑和优化。3) 设计高效的回环检测算法,以减少累积误差。4) 针对触觉数据的特点,设计专门的特征提取算法,以提高特征的稳定性和鲁棒性。
🖼️ 关键图片


📊 实验亮点
GelSLAM在实验中表现出优异的性能。在物体跟踪方面,GelSLAM能够以低误差和最小漂移实时跟踪物体的运动。在形状重建方面,GelSLAM能够以亚毫米级的精度重建物体形状,即使对于木制工具等低纹理物体也是如此。实验结果表明,GelSLAM的性能优于传统的基于视觉的SLAM方法,尤其是在遮挡和低纹理环境下。
🎯 应用场景
GelSLAM在机器人灵巧操作、假肢控制、虚拟现实交互等领域具有广泛的应用前景。例如,可以应用于机器人手部操作,使机器人能够更精确地抓取和操作物体。在假肢控制方面,可以帮助残疾人更好地感知和控制假肢。在虚拟现实交互方面,可以提供更真实的触觉反馈,增强用户的沉浸感。
📄 摘要(原文)
Accurately perceiving an object's pose and shape is essential for precise grasping and manipulation. Compared to common vision-based methods, tactile sensing offers advantages in precision and immunity to occlusion when tracking and reconstructing objects in contact. This makes it particularly valuable for in-hand and other high-precision manipulation tasks. In this work, we present GelSLAM, a real-time 3D SLAM system that relies solely on tactile sensing to estimate object pose over long periods and reconstruct object shapes with high fidelity. Unlike traditional point cloud-based approaches, GelSLAM uses tactile-derived surface normals and curvatures for robust tracking and loop closure. It can track object motion in real time with low error and minimal drift, and reconstruct shapes with submillimeter accuracy, even for low-texture objects such as wooden tools. GelSLAM extends tactile sensing beyond local contact to enable global, long-horizon spatial perception, and we believe it will serve as a foundation for many precise manipulation tasks involving interaction with objects in hand. The video demo is available on our website: https://joehjhuang.github.io/gelslam.