Understanding and Utilizing Dynamic Coupling in Free-Floating Space Manipulators for On-Orbit Servicing
作者: Gargi Das, Daegyun Choi, Donghoon Kim
分类: cs.RO, eess.SY
发布日期: 2025-08-21
备注: 17 pages, 7 figures, 2025 AAS/AIAA Astrodynamics Specialist Conference
💡 一句话要点
提出动态耦合感知的空间机械臂轨迹优化算法,提升在轨服务效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空间机械臂 动态耦合 轨迹优化 奇异值分解 在轨服务
📋 核心要点
- 现有空间机械臂研究主要致力于最小化动态耦合,忽略了其潜在的积极作用,限制了系统性能。
- 本研究通过奇异值分解分析动态耦合矩阵,提取关键耦合信息,并将其融入轨迹优化过程。
- 仿真结果验证了该方法的可行性,表明显式考虑动态耦合能够提升空间机械臂的操作效率。
📝 摘要(中文)
本研究提出了一种针对自由漂浮空间机械臂系统(SMSs)的动态耦合感知轨迹优化算法。基座和机械臂之间的动态耦合对系统的行为有重要影响。以往的研究主要集中在最小化这种耦合,往往忽略了其潜在优势。本文探讨了如何利用动态耦合来改进轨迹规划。采用动态耦合矩阵的奇异值分解(SVD)来识别控制耦合行为的主导分量。然后,制定一个定量指标来表征耦合的强度和方向性,并将其纳入轨迹优化框架。为了评估优化轨迹的可行性,设计了一个基于滑模控制的跟踪控制器来生成所需的关节力矩输入。仿真结果表明,在轨迹规划中显式地考虑动态耦合能够实现更明智、更高效的操作,为自由漂浮SMSs的控制提供了新的方向。
🔬 方法详解
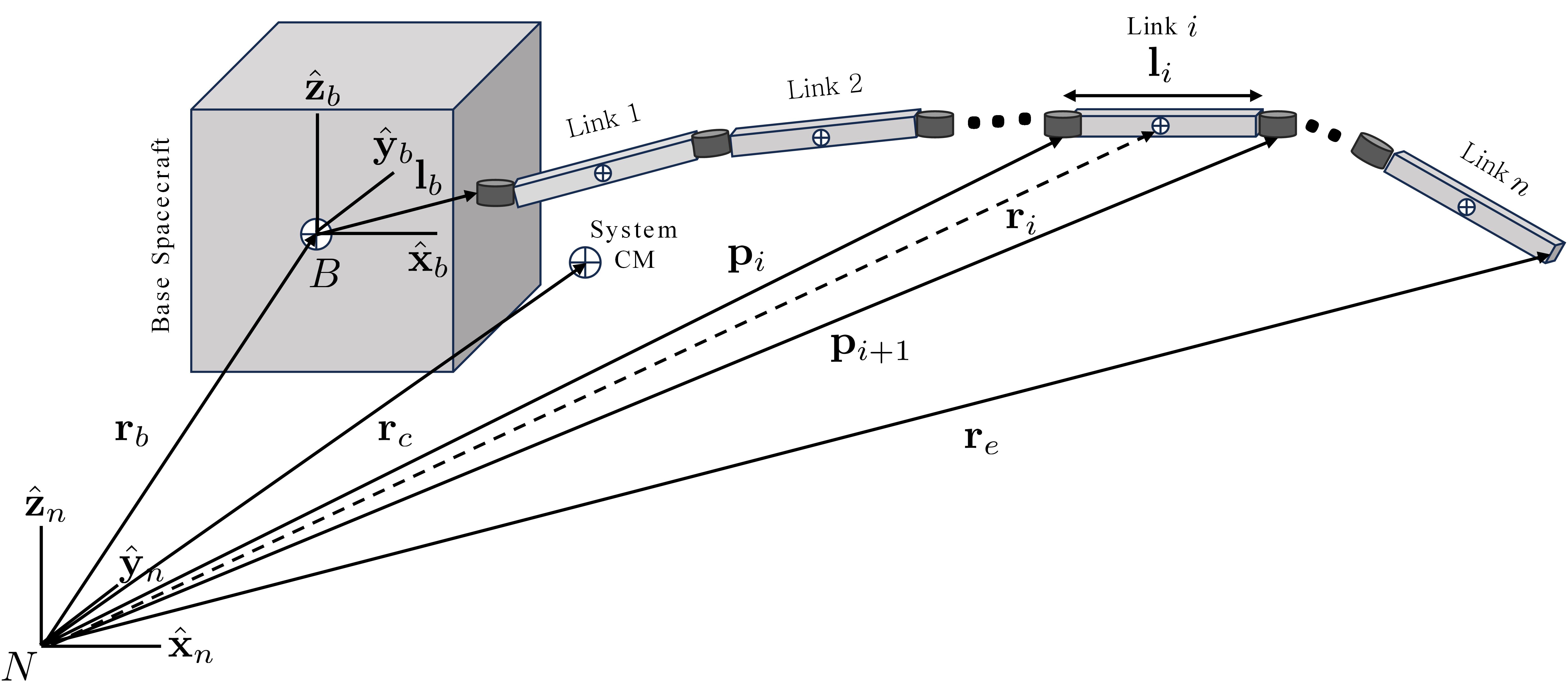
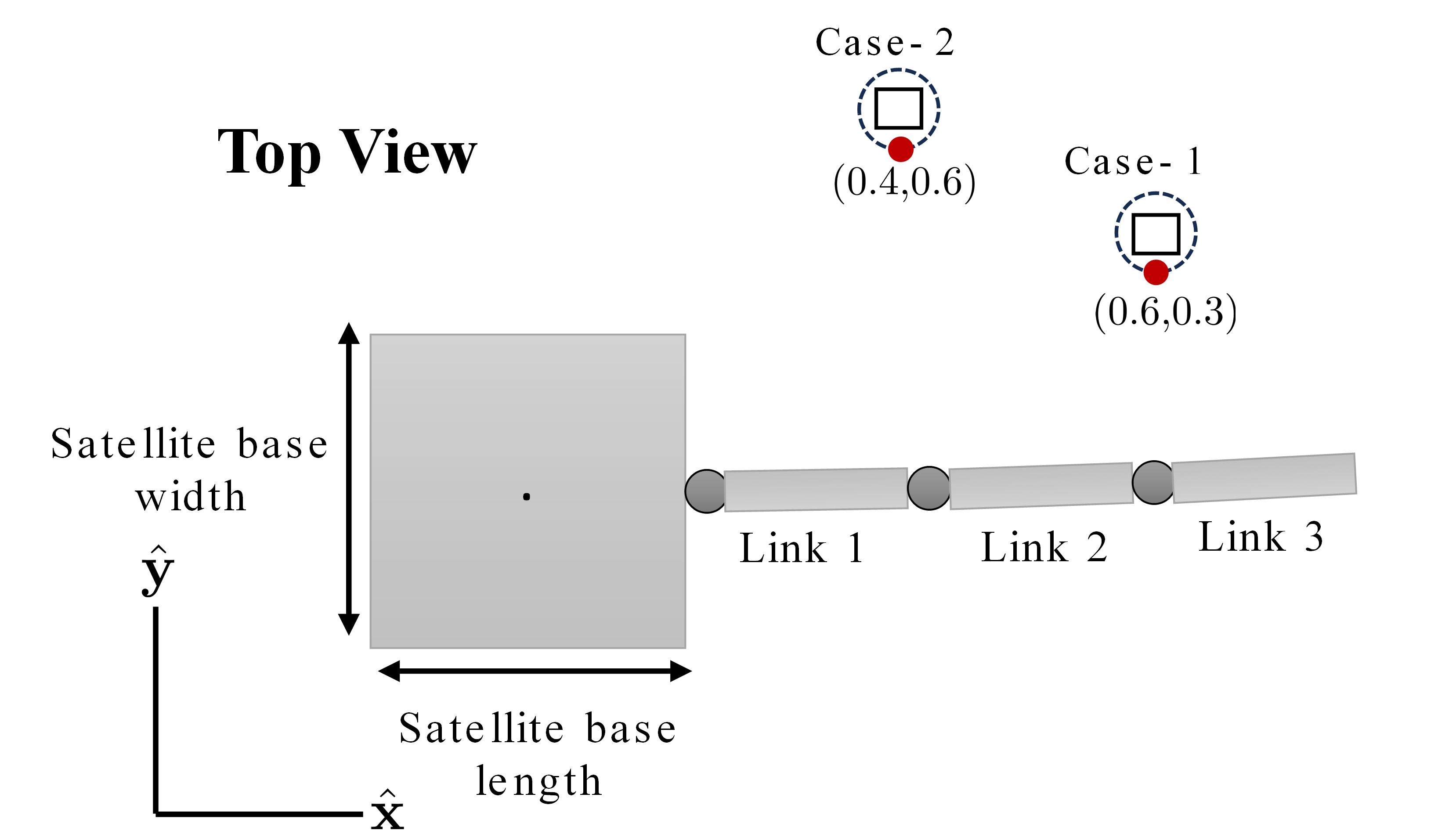
问题定义:自由漂浮空间机械臂在轨服务时,基座与机械臂之间的动态耦合会显著影响系统的运动。传统方法通常试图最小化这种耦合,但忽略了其潜在的利用价值。因此,如何有效地理解和利用动态耦合,以提升轨迹规划的效率和性能,是一个关键问题。现有方法的痛点在于,未能充分挖掘动态耦合所蕴含的信息,导致轨迹优化受限。
核心思路:本研究的核心思路是,将动态耦合视为一种可利用的资源,而非需要消除的干扰。通过分析动态耦合矩阵,提取其主导分量,并将其纳入轨迹优化框架,从而实现对动态耦合的有效利用。这种方法旨在找到一种平衡,既能利用动态耦合的优势,又能避免其带来的负面影响。
技术框架:该方法的技术框架主要包括以下几个阶段:1) 动态耦合建模:建立自由漂浮空间机械臂系统的动力学模型,并推导出动态耦合矩阵。2) 奇异值分解(SVD):对动态耦合矩阵进行SVD,提取其主导分量,用于表征耦合的强度和方向性。3) 轨迹优化:构建轨迹优化问题,将动态耦合信息作为约束或目标函数的一部分,优化机械臂的关节轨迹。4) 控制器设计:设计基于滑模控制的跟踪控制器,用于实现优化后的关节轨迹。
关键创新:本研究的关键创新在于,首次提出将动态耦合视为一种可利用的资源,并将其显式地纳入轨迹优化框架。与传统方法不同,该方法不再试图最小化动态耦合,而是通过分析和利用其主导分量,来提升轨迹规划的效率和性能。这种思路的转变为自由漂浮空间机械臂的控制提供了新的方向。
关键设计:在轨迹优化阶段,需要设计一个合适的定量指标来表征动态耦合的强度和方向性。该指标可以基于SVD分解得到的主导奇异值和奇异向量来构建。此外,还需要选择合适的优化算法,如序列二次规划(SQP)或内点法,来求解轨迹优化问题。滑模控制器的设计需要仔细选择滑模面和控制增益,以保证跟踪精度和鲁棒性。
🖼️ 关键图片

📊 实验亮点
仿真结果表明,通过显式考虑动态耦合进行轨迹规划,可以显著提高机械臂的操作效率。具体而言,优化后的轨迹能够减少关节力矩的需求,降低能源消耗,并提高任务的完成速度。与传统忽略动态耦合的方法相比,该方法在性能上取得了显著提升(具体提升幅度未知,原文未提供具体数据)。
🎯 应用场景
该研究成果可应用于各类在轨服务任务,如卫星维修、燃料加注、碎片清理等。通过优化机械臂的运动轨迹,可以提高任务的执行效率和安全性,降低能源消耗。此外,该方法还可以推广到其他具有复杂动态耦合的机器人系统,如水下机器人、柔性机器人等,具有广阔的应用前景。
📄 摘要(原文)
This study proposes a dynamic coupling-informed trajectory optimization algorithm for free-floating space manipulator systems (SMSs). Dynamic coupling between the base and the manipulator arms plays a critical role in influencing the system's behavior. While prior research has predominantly focused on minimizing this coupling, often overlooking its potential advantages, this work investigates how dynamic coupling can instead be leveraged to improve trajectory planning. Singular value decomposition (SVD) of the dynamic coupling matrix is employed to identify the dominant components governing coupling behavior. A quantitative metric is then formulated to characterize the strength and directionality of the coupling and is incorporated into a trajectory optimization framework. To assess the feasibility of the optimized trajectory, a sliding mode control-based tracking controller is designed to generate the required joint torque inputs. Simulation results demonstrate that explicitly accounting for dynamic coupling in trajectory planning enables more informed and potentially more efficient operation, offering new directions for the control of free-floating SMSs.