Sensing, Social, and Motion Intelligence in Embodied Navigation: A Comprehensive Survey
作者: Chaoran Xiong, Yulong Huang, Fangwen Yu, Changhao Chen, Yue Wang, Songpengchen Xia, Ling Pei
分类: cs.RO
发布日期: 2025-08-21
🔗 代码/项目: GITHUB
💡 一句话要点
具身导航综述:融合感知、社交与运动智能实现类人自主导航
🎯 匹配领域: 支柱六:视频提取与匹配 (Video Extraction)
关键词: 具身导航 机器人导航 深度学习 强化学习 社交智能
📋 核心要点
- 传统导航依赖预定义地图和精确定位,难以应对复杂动态环境和类人交互需求。
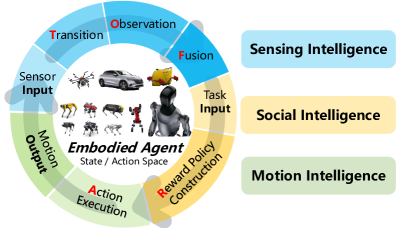
- 论文提出TOFRA框架,将具身导航分解为状态转移、观察、融合、奖励策略构建和动作五个阶段。
- 该综述系统回顾了具身导航领域的研究进展,并指出了未来研究的关键挑战和方向。
📝 摘要(中文)
具身导航(EN)通过融合感知、社交和运动智能,使机器人能够执行复杂的以自我为中心的任务,从而推进了传统导航技术。与依赖显式定位和预定义地图的经典方法不同,EN利用以自我为中心的感知和类人交互策略。本综述介绍了一个全面的EN公式,该公式被组织成五个阶段:Transition(状态转移)、Observation(观察)、Fusion(融合)、Reward-policy construction(奖励策略构建)和Action(动作)(TOFRA)。TOFRA框架旨在综合当前最先进的技术,对相关平台和评估指标进行批判性回顾,并确定关键的开放研究挑战。相关研究列表可在https://github.com/Franky-X/Awesome-Embodied-Navigation上找到。
🔬 方法详解
问题定义:具身导航旨在使机器人能够在复杂环境中自主导航,并与环境和人类进行交互。现有方法通常依赖于预定义的地图和精确的定位,这在动态和未知的环境中表现不佳。此外,传统方法缺乏对社交线索的理解和利用,难以实现类人化的导航行为。
核心思路:论文的核心思路是将具身导航分解为五个关键阶段:状态转移(Transition)、观察(Observation)、融合(Fusion)、奖励策略构建(Reward-policy construction)和动作(Action),即TOFRA框架。通过这种分解,可以更清晰地理解每个阶段的任务和挑战,并促进模块化和可扩展的解决方案的设计。
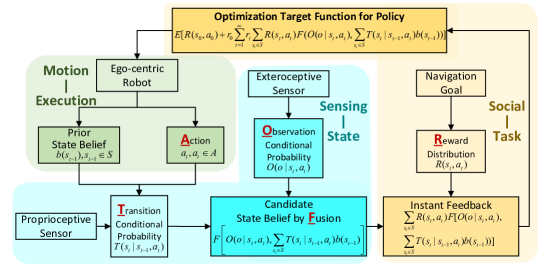
技术框架:TOFRA框架将具身导航过程划分为五个阶段。状态转移阶段负责根据当前状态和动作预测下一个状态。观察阶段利用传感器数据获取环境信息。融合阶段将来自不同传感器和模态的信息进行整合。奖励策略构建阶段定义了导航任务的目标和约束,并生成奖励信号。动作阶段根据当前状态和策略选择合适的动作。整个框架形成一个闭环控制系统,使机器人能够自主导航。
关键创新:该综述的关键创新在于提出了TOFRA框架,为具身导航的研究提供了一个统一的视角和组织结构。TOFRA框架不仅可以帮助研究人员更好地理解现有方法,还可以促进新方法的开发和比较。此外,该综述还对具身导航领域的关键挑战和未来方向进行了深入的分析。
关键设计:TOFRA框架本身是一个概念性的框架,并没有具体的参数设置或网络结构。然而,每个阶段的具体实现都需要仔细的设计。例如,观察阶段需要选择合适的传感器和感知算法。融合阶段需要设计有效的融合策略,以处理来自不同模态的信息。奖励策略构建阶段需要仔细定义奖励函数,以引导机器人学习期望的行为。动作阶段需要选择合适的控制算法,以实现精确的运动控制。
🖼️ 关键图片

📊 实验亮点
该综述系统地总结了具身导航领域的研究进展,并提出了TOFRA框架,为该领域的研究提供了一个统一的视角。此外,该综述还对现有的平台和评估指标进行了批判性的回顾,并指出了未来研究的关键挑战,例如如何有效地融合多模态信息、如何设计更鲁棒的奖励函数、如何实现更自然的社交交互等。
🎯 应用场景
具身导航技术在机器人自主服务、智能家居、自动驾驶、搜索救援等领域具有广泛的应用前景。通过赋予机器人感知、社交和运动智能,可以使其在复杂环境中安全高效地完成各种任务,例如送货、导游、清洁等。未来,具身导航技术有望成为实现通用人工智能的关键组成部分。
📄 摘要(原文)
Embodied navigation (EN) advances traditional navigation by enabling robots to perform complex egocentric tasks through sensing, social, and motion intelligence. In contrast to classic methodologies that rely on explicit localization and pre-defined maps, EN leverages egocentric perception and human-like interaction strategies. This survey introduces a comprehensive EN formulation structured into five stages: Transition, Observation, Fusion, Reward-policy construction, and Action (TOFRA). The TOFRA framework serves to synthesize the current state of the art, provide a critical review of relevant platforms and evaluation metrics, and identify critical open research challenges. A list of studies is available at https://github.com/Franky-X/Awesome-Embodied-Navigation.