Robot Policy Evaluation for Sim-to-Real Transfer: A Benchmarking Perspective
作者: Xuning Yang, Clemens Eppner, Jonathan Tremblay, Dieter Fox, Stan Birchfield, Fabio Ramos
分类: cs.RO
发布日期: 2025-08-14
备注: 2025 Robot: Science and Systems (RSS) Workshop on Robot Evaluation for the Real World
💡 一句话要点
提出机器人策略评估基准,提升模拟到真实环境的策略迁移能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 策略评估 模拟到真实迁移 基准测试 视觉逼真度
📋 核心要点
- 现有机器人仿真基准缺乏对真实世界应用的充分评估,阻碍了通用策略的开发和部署。
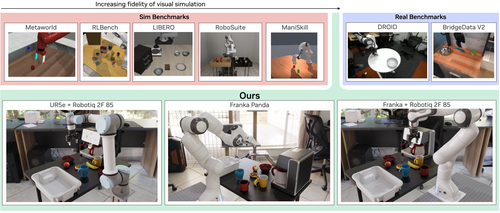
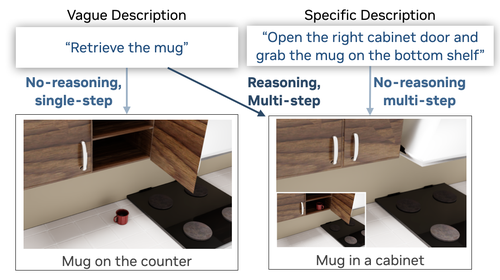
- 论文提出利用高视觉逼真度仿真、增加任务复杂度和场景扰动等方法,系统性地评估策略的鲁棒性。
- 该研究旨在量化真实世界和仿真环境之间的性能差距,为改进模拟到真实迁移提供指导。
📝 摘要(中文)
当前基于视觉的机器人仿真基准显著推动了机器人操作研究。然而,机器人本质上是一个现实世界的问题,通用策略在真实世界应用中的评估滞后于仿真评估。本文讨论了为实现模拟到真实策略迁移的通用机器人操作策略基准设计中的挑战和需求。我们提出:1) 利用高视觉逼真度的仿真来改进模拟到真实迁移;2) 通过系统地增加任务复杂性和场景扰动来评估策略,以评估其鲁棒性;3) 量化真实世界性能与其仿真对应物之间的性能对齐。
🔬 方法详解
问题定义:现有机器人操作策略的评估主要集中在仿真环境中,缺乏对真实世界性能的有效评估。这导致在仿真环境中表现良好的策略,在实际部署时往往效果不佳,阻碍了机器人技术的实际应用。现有的评估方法难以衡量策略的泛化能力和鲁棒性,无法应对真实世界中存在的各种复杂性和不确定性。
核心思路:论文的核心思路是构建一个更贴近真实世界的机器人策略评估基准。该基准通过提高仿真环境的视觉逼真度、增加任务的复杂性和场景的扰动,来模拟真实世界中的各种挑战。同时,该基准还关注真实世界性能与仿真性能之间的对齐,旨在量化和缩小两者之间的差距。
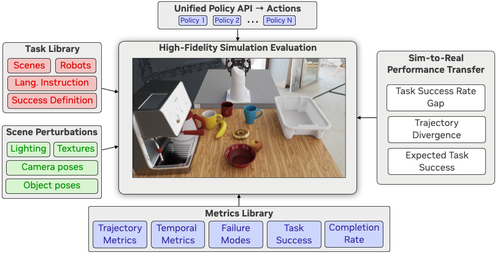
技术框架:该论文主要讨论了基准的设计原则和 desiderata,并没有提出一个具体的、完整的技术框架。但是,可以推断出,一个理想的基准应该包含以下几个主要模块:1) 高逼真度的仿真环境,能够尽可能真实地模拟物理世界;2) 多样化的任务集,涵盖各种常见的机器人操作任务,并具有不同的难度级别;3) 场景扰动模块,能够模拟真实世界中存在的各种干扰因素,如光照变化、物体位置不确定性等;4) 评估指标,能够全面衡量策略的性能,包括成功率、效率、鲁棒性等。
关键创新:该论文的关键创新在于提出了一个系统性的机器人策略评估基准设计思路,强调了高视觉逼真度仿真、任务复杂性和场景扰动的重要性。与以往的仿真基准相比,该基准更注重真实世界性能的评估,旨在弥合仿真与真实世界之间的差距。
关键设计:论文中没有提供具体的参数设置、损失函数或网络结构等技术细节。但是,可以推断出,在具体实现该基准时,需要考虑以下关键设计:1) 如何构建高逼真度的仿真环境,例如使用高质量的3D模型、真实的物理引擎等;2) 如何设计多样化的任务集,例如根据任务的难度、类型等进行分类;3) 如何模拟真实世界中的各种干扰因素,例如使用随机噪声、图像增强等;4) 如何选择合适的评估指标,例如使用成功率、平均完成时间、鲁棒性指标等。
🖼️ 关键图片
📊 实验亮点
论文提出了机器人策略评估基准的设计原则,强调了高视觉逼真度仿真、任务复杂性和场景扰动的重要性。虽然没有提供具体的实验结果,但该研究为未来的机器人策略评估和模拟到真实迁移研究提供了重要的指导。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如工业自动化、家庭服务机器人、医疗机器人等。通过使用该基准评估和改进机器人策略,可以提高机器人在真实世界中的性能和可靠性,加速机器人技术的实际应用。此外,该研究还可以促进模拟到真实迁移技术的发展,降低机器人开发的成本和时间。
📄 摘要(原文)
Current vision-based robotics simulation benchmarks have significantly advanced robotic manipulation research. However, robotics is fundamentally a real-world problem, and evaluation for real-world applications has lagged behind in evaluating generalist policies. In this paper, we discuss challenges and desiderata in designing benchmarks for generalist robotic manipulation policies for the goal of sim-to-real policy transfer. We propose 1) utilizing high visual-fidelity simulation for improved sim-to-real transfer, 2) evaluating policies by systematically increasing task complexity and scenario perturbation to assess robustness, and 3) quantifying performance alignment between real-world performance and its simulation counterparts.