Learning Stack-of-Tasks Management for Redundant Robots
作者: Alessandro Adami, Aris Synodinos, Matteo Iovino, Ruggero Carli, Pietro Falco
分类: cs.RO, eess.SY
发布日期: 2025-08-14 (更新: 2025-12-23)
💡 一句话要点
提出基于遗传编程的Stack-of-Tasks学习框架,用于冗余机器人控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Stack-of-Tasks 冗余机器人 遗传编程 机器人控制 自主学习
📋 核心要点
- 传统Stack-of-Tasks方法依赖手动设计和调整任务层级,耗时且难以适应复杂环境和多目标优化。
- 该论文提出一种基于遗传编程的自动SoT学习框架,直接从用户定义的成本函数中优化任务优先级、激活逻辑和控制参数。
- 实验表明,该方法在双臂机器人上实现了安全、精确的运动控制,并成功从仿真迁移到真实机器人,无需额外调整。
📝 摘要(中文)
本文提出了一种新颖的框架,用于自动学习冗余机器人系统的完整Stack-of-Tasks (SoT) 控制器,包括任务优先级、激活逻辑和控制参数。与传统的手动定义和调整任务层级的SoT流程不同,我们的方法直接从用户指定的成本函数中优化完整的SoT结构,该成本函数编码了诸如安全性、精度、可操作性或执行速度等直观偏好。该方法结合了遗传编程和基于仿真的评估,以探索控制器的离散(优先级顺序、任务激活)和连续(增益、轨迹持续时间)组件。我们在双臂移动机械臂(ABB mobile-YuMi研究平台)上验证了该框架,证明了其在多种成本定义下的鲁棒收敛性、自动抑制不相关任务以及对干扰的强大弹性。学习到的SoT表现出类似专家的分层结构,并自然地适应多目标权衡。至关重要的是,所有控制器都从Gazebo仿真转移到真实机器人,无需额外调整即可实现安全和精确的运动。在静态和动态环境中的实验表明,在存在人类的情况下,该方法具有可靠的避障、高跟踪精度和可预测的行为。所提出的方法为手动SoT设计提供了一种可解释且可扩展的替代方案,从而能够快速、用户驱动地生成复杂机器人系统的任务执行层级。
🔬 方法详解
问题定义:论文旨在解决冗余机器人系统中Stack-of-Tasks (SoT) 控制器设计的问题。传统SoT方法需要人工定义任务优先级和控制参数,过程繁琐且难以优化。尤其是在复杂环境中,手动调整SoT结构以满足多目标(如安全、精度、速度)的需求极具挑战。现有方法缺乏自动学习和适应环境变化的能力。
核心思路:论文的核心思路是利用遗传编程自动搜索最优的SoT结构和参数。通过将SoT的离散组件(任务优先级、激活逻辑)和连续组件(控制增益、轨迹时长)编码为基因,遗传编程算法能够探索不同的SoT配置,并根据用户定义的成本函数进行评估。这种方法避免了手动设计的局限性,能够自动发现满足特定任务需求的SoT结构。
技术框架:整体框架包含以下几个主要阶段:1) SoT编码:将SoT的结构和参数编码为遗传算法的基因。2) 初始化种群:随机生成一组SoT个体作为初始种群。3) 仿真评估:在Gazebo仿真环境中评估每个SoT个体的性能,根据用户定义的成本函数计算适应度。4) 遗传操作:利用选择、交叉和变异等遗传操作生成新的SoT个体。5) 迭代优化:重复仿真评估和遗传操作,直到找到满足要求的SoT结构。6) 真实机器人部署:将学习到的SoT控制器部署到真实机器人上进行验证。
关键创新:该方法最重要的创新点在于实现了SoT结构的自动学习和优化,无需人工干预。与传统的基于规则或优化的SoT设计方法相比,该方法能够自动发现满足特定任务需求的SoT结构,并适应环境变化。此外,该方法将遗传编程与仿真评估相结合,能够有效地探索SoT的离散和连续参数空间。
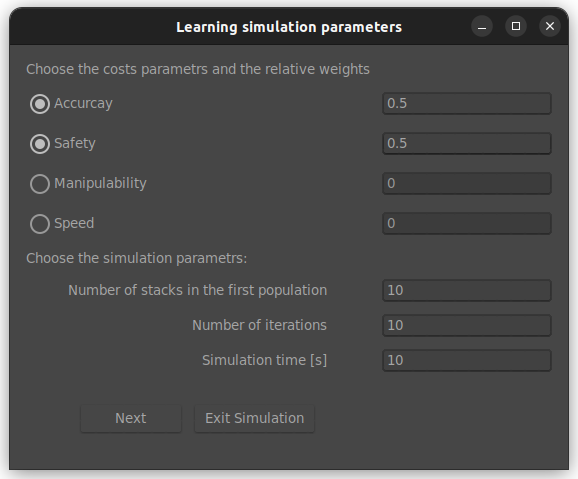
关键设计:关键设计包括:1) 成本函数设计:用户需要定义一个成本函数,用于评估SoT个体的性能。成本函数可以包含多个目标,如安全性、精度、可操作性等。2) 遗传算子设计:需要设计合适的选择、交叉和变异算子,以保证遗传算法的有效性。3) 仿真环境搭建:需要搭建一个真实的仿真环境,用于评估SoT个体的性能。4) 参数设置:需要设置遗传算法的参数,如种群大小、迭代次数、交叉概率和变异概率等。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法能够在双臂移动机器人ABB YuMi上成功学习到有效的SoT控制器。学习到的控制器能够实现安全、精确的运动控制,并在静态和动态环境中表现出良好的避障能力和跟踪精度。更重要的是,学习到的控制器可以直接从Gazebo仿真迁移到真实机器人,无需额外的调整,这大大简化了机器人控制系统的开发过程。实验还表明,该方法能够自动抑制不相关的任务,并适应多目标权衡。
🎯 应用场景
该研究成果可广泛应用于各种冗余机器人系统,例如双臂机器人、移动机械臂和人形机器人。通过自动学习SoT控制器,可以显著降低机器人控制系统的开发成本和时间,提高机器人的自主性和适应性。该方法在工业自动化、医疗机器人、服务机器人等领域具有广阔的应用前景,能够实现更安全、高效和智能的机器人操作。
📄 摘要(原文)
This paper presents a novel framework for automatically learning complete Stack-of-Tasks (SoT) controllers for redundant robotic systems, including task priorities, activation logic, and control parameters. Unlike classical SoT pipelines-where task hierarchies are manually defined and tuned-our approach optimizes the full SoT structure directly from a user-specified cost function encoding intuitive preferences such as safety, precision, manipulability, or execution speed. The method combines Genetic Programming with simulation-based evaluation to explore both discrete (priority order, task activation) and continuous (gains, trajectory durations) components of the controller. We validate the framework on a dual-arm mobile manipulator (the ABB mobile-YuMi research platform), demonstrating robust convergence across multiple cost definitions, automatic suppression of irrelevant tasks, and strong resilience to distractors. Learned SoTs exhibit expert-like hierarchical structure and adapt naturally to multi-objective trade-offs. Crucially, all controllers transfer from Gazebo simulation to the real robot, achieving safe and precise motion without additional tuning. Experiments in static and dynamic environments show reliable obstacle avoidance, high tracking accuracy, and predictable behavior in the presence of humans. The proposed method provides an interpretable and scalable alternative to manual SoT design, enabling rapid, user-driven generation of task execution hierarchies for complex robotic systems.