Hybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis
作者: Kejun Li, Jeeseop Kim, Maxime Brunet, Marine Pétriaux, Yisong Yue, Aaron D. Ames
分类: cs.RO
发布日期: 2025-08-14
备注: 8 pages; 8 figures
💡 一句话要点
提出混合数据驱动预测控制,实现外骨骼稳健和反应式步态合成
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion) 支柱八:物理动画 (Physics-based Animation)
关键词: 外骨骼机器人 预测控制 数据驱动控制 步态合成 汉克尔矩阵
📋 核心要点
- 外骨骼步态控制需要在动态环境中实时响应变化,现有方法难以兼顾鲁棒性和反应性。
- HDDPC框架通过结合数据驱动的预测控制和步间转移模型,实现了接触调度和轨迹规划的统一优化。
- 在Atalante外骨骼上的实验验证表明,该方法能够提高外骨骼在复杂环境中的鲁棒性和适应性。
📝 摘要(中文)
本文提出了一种混合数据驱动预测控制(HDDPC)框架,它是数据使能预测控制的扩展,旨在解决外骨骼稳健双足运动中实时动态响应环境变化的问题。该框架利用基于汉克尔矩阵的表示来建模系统动力学,并结合步间(S2S)转移来增强在动态环境中的适应性。通过将接触调度与轨迹规划相结合,该框架为步态运动合成提供了一种高效、统一的解决方案,通过在线重规划实现稳健和反应式行走。我们在Atalante外骨骼上验证了该方法,证明了其改进的鲁棒性和适应性。
🔬 方法详解
问题定义:论文旨在解决外骨骼在复杂动态环境中难以实现稳健且具有实时反应能力的步态控制问题。现有方法通常难以同时优化足部接触时序和连续轨迹,导致对外骨骼的控制在面对环境变化时缺乏足够的适应性和鲁棒性。
核心思路:论文的核心思路是将数据驱动的预测控制与步间转移模型相结合,从而实现足部接触时序和连续轨迹的联合优化。通过数据驱动的方式学习系统动力学,并利用预测控制实现在线轨迹规划,步间转移模型则用于增强系统对环境变化的适应性。
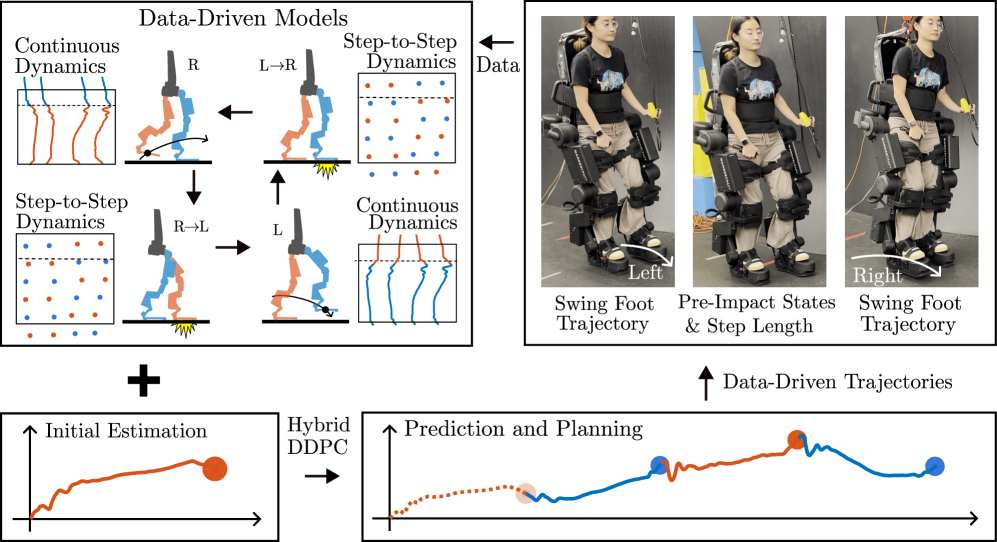
技术框架:HDDPC框架主要包含以下几个模块:1) 基于汉克尔矩阵的系统动力学建模模块,利用历史数据学习系统动态特性;2) 步间转移(S2S)模型,用于描述不同步态之间的转移关系,增强适应性;3) 预测控制模块,根据当前状态和预测的未来状态,在线优化足部接触时序和连续轨迹。整个框架通过在线重规划,实现对外骨骼的实时控制。
关键创新:该方法最重要的创新在于将数据驱动的预测控制与步间转移模型相结合,实现了接触调度和轨迹规划的统一优化。与传统的基于模型的控制方法相比,该方法能够更好地适应复杂动态环境,提高外骨骼的鲁棒性和反应性。此外,基于汉克尔矩阵的系统动力学建模方法能够有效地利用历史数据,提高模型精度。
关键设计:论文中,汉克尔矩阵的构建方式和大小,以及预测控制中的优化目标函数是关键的设计细节。优化目标函数通常包含对轨迹平滑性、能量消耗和跟踪误差的约束。步间转移模型的具体形式(例如,基于神经网络或高斯过程)也会影响最终的控制效果。具体的参数设置和损失函数细节在论文正文中应该有更详细的描述(未知)。
🖼️ 关键图片


📊 实验亮点
论文在Atalante外骨骼上进行了实验验证,结果表明,与传统的控制方法相比,HDDPC框架能够显著提高外骨骼在动态环境中的鲁棒性和适应性。具体的性能数据(例如,在特定扰动下的步态稳定性和恢复时间)和对比基线(例如,基于模型的控制方法)需要在论文正文中查找(未知)。实验结果表明,该方法能够有效地实现外骨骼的稳健和反应式行走。
🎯 应用场景
该研究成果可应用于各种外骨骼机器人,例如用于康复训练、辅助行走和增强人体能力的设备。通过提高外骨骼在复杂环境中的鲁棒性和适应性,该方法可以显著改善外骨骼的使用体验,并扩展其应用范围,例如在崎岖地形或拥挤人群中行走。此外,该方法还可以推广到其他类型的机器人控制问题,例如人形机器人和四足机器人的运动规划。
📄 摘要(原文)
Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. The proposed framework utilizes a Hankel matrix-based representation to model system dynamics, incorporating step-to-step (S2S) transitions to enhance adaptability in dynamic environments. By integrating contact scheduling with trajectory planning, the framework offers an efficient, unified solution for locomotion motion synthesis that enables robust and reactive walking through online replanning. We validate the approach on the Atalante exoskeleton, demonstrating improved robustness and adaptability.