From Canada to Japan: How 10,000 km Affect User Perception in Robot Teleoperation
作者: Siméon Capy, Thomas M. Kwok, Kevin Joseph, Yuichiro Kawasumi, Koichi Nagashima, Tomoya Sasaki, Yue Hu, Eiichi Yoshida
分类: cs.RO
发布日期: 2025-08-07 (更新: 2025-10-31)
备注: Author preprint - Accepted for Humanoids 2025
DOI: 10.1109/Humanoids65713.2025.11203134
💡 一句话要点
研究长距离遥操作对用户感知的影响,探索其在老年人护理中的潜力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人遥操作 用户感知 长距离通信 老年人护理 ROS Unity
📋 核心要点
- 机器人遥操作作为本地控制的替代方案,在需要人工干预时具有优势,但长距离操作对用户感知的影响尚不明确。
- 本研究通过设计问卷和软件架构,评估用户在本地和远程遥操作机器人时的感知差异,旨在探索其在老年人护理中的潜力。
- 实验结果表明,本地和远程机器人操作在用户感知上没有显著差异,验证了机器人遥操作作为本地控制替代方案的可行性。
📝 摘要(中文)
本研究旨在探讨距离对机器人遥操作(RTo)中用户感知的影响,尤其关注其在老年人护理中的应用潜力。我们评估了非专业用户对长距离RTo的感知,考察了他们在交互前后感知的变化,并将其与本地操作机器人的感知进行了比较。我们设计了一个包含多个问卷的特定协议,以及一个使用机器人操作系统(ROS)和Unity的专用软件架构。结果表明,本地和远程机器人条件之间没有统计学上的显著差异,这表明机器人可能是传统本地控制的可行替代方案。
🔬 方法详解
问题定义:论文旨在研究在机器人遥操作(RTo)中,长距离(加拿大到日本,约10000公里)对用户感知的影响。现有方法主要关注本地控制,缺乏对长距离遥操作用户体验的深入研究,尤其是在老年人护理等需要远程协助的场景下。现有研究未能充分评估用户在实际操作前后,以及与本地操作对比下的感知差异。
核心思路:论文的核心思路是通过对比用户在本地和远程遥操作机器人时的感知差异,来评估长距离遥操作的可行性和用户体验。通过问卷调查收集用户的主观感受,并结合客观数据进行分析,从而量化距离对用户感知的影响。这种对比研究方法能够更清晰地揭示长距离遥操作的优势和不足。
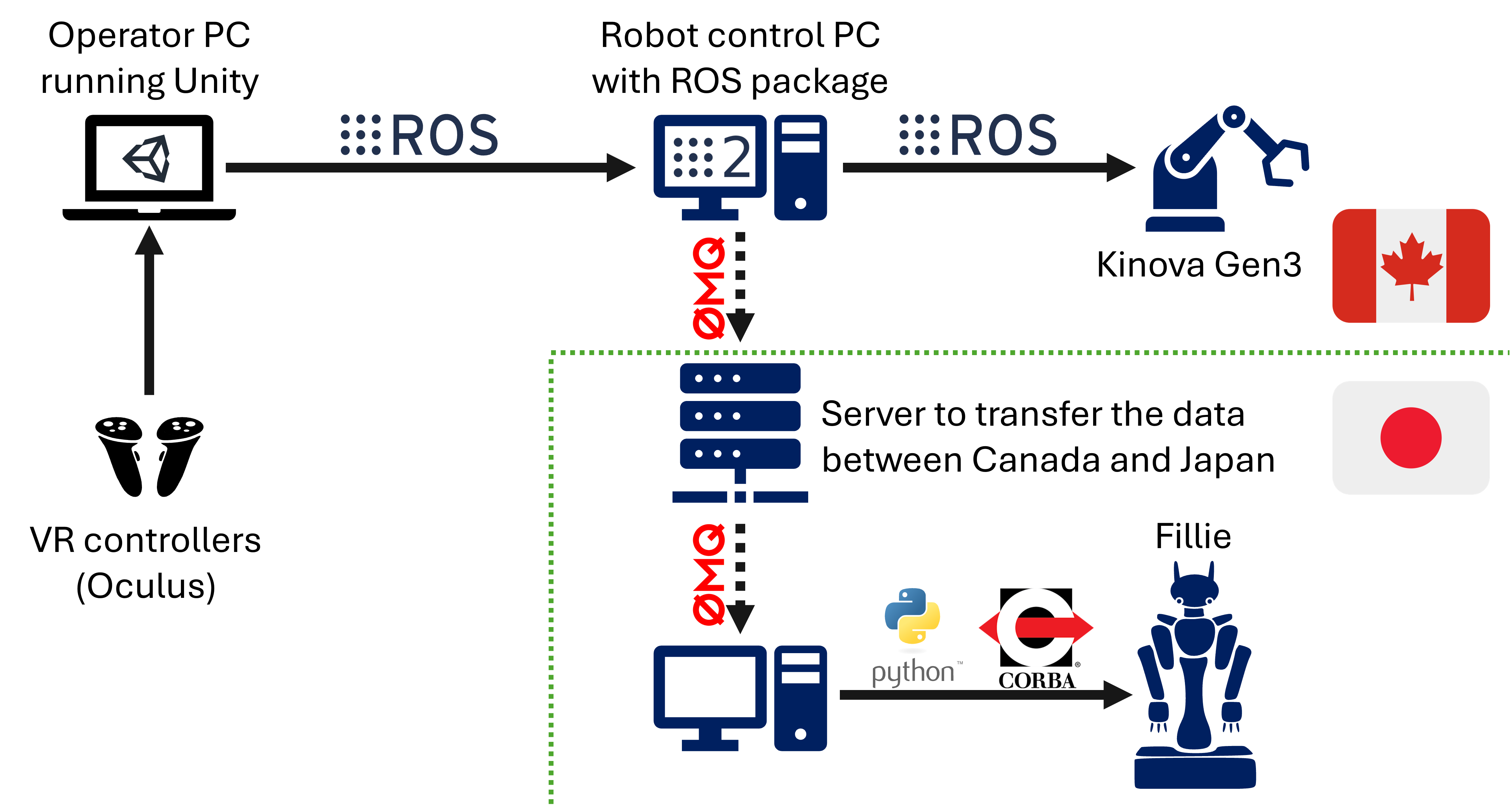
技术框架:整体架构包括:1) 用户招募和分组(本地组和远程组);2) 问卷设计,用于评估用户在操作前后对机器人的感知;3) 机器人遥操作平台,基于ROS和Unity构建,提供远程控制界面;4) 数据采集,记录用户操作数据和问卷结果;5) 数据分析,对比本地组和远程组的感知差异。
关键创新:论文的关键创新在于:1) 关注长距离机器人遥操作的用户感知,填补了相关研究的空白;2) 设计了专门的实验协议和软件架构,用于评估用户在本地和远程条件下的感知差异;3) 采用非专业用户进行测试,更贴近实际应用场景,结果更具参考价值。
关键设计:问卷设计包括多个维度,例如机器人的可控性、安全性、实用性等。机器人遥操作平台基于ROS实现机器人控制,Unity提供用户界面和可视化。实验过程中,用户需要完成特定的任务,例如移动物体、进行对话等。数据分析采用统计方法,例如t检验、方差分析等,来评估本地组和远程组的感知差异。
🖼️ 关键图片


📊 实验亮点
实验结果表明,在用户感知方面,本地和远程机器人操作之间没有统计学上的显著差异。这意味着即使距离遥远(10000公里),用户在使用机器人进行遥操作时,其感知体验与本地操作相似。这一发现验证了长距离机器人遥操作的可行性,并为远程服务提供了新的可能性。
🎯 应用场景
该研究成果可应用于远程医疗、老年人护理、灾难救援等领域。通过机器人遥操作,专家可以在远距离为患者提供诊断和治疗,老年人可以获得远程协助,救援人员可以在危险环境中进行作业。该研究有助于推动机器人遥操作技术的发展和应用,提高远程服务的效率和质量。
📄 摘要(原文)
Robot teleoperation (RTo) has emerged as a viable alternative to local control, particularly when human intervention is still necessary. This research aims to study the distance effect on user perception in RTo, exploring the potential of teleoperated robots for older adult care. We propose an evaluation of non-expert users' perception of long-distance RTo, examining how their perception changes before and after interaction, as well as comparing it to that of locally operated robots. We have designed a specific protocol consisting of multiple questionnaires, along with a dedicated software architecture using the Robotics Operating System (ROS) and Unity. The results revealed no statistically significant differences between the local and remote robot conditions, suggesting that robots may be a viable alternative to traditional local control.