Benchmarking Shortcutting Techniques for Multi-Robot-Arm Motion Planning
作者: Philip Huang, Yorai Shaoul, Jiaoyang Li
分类: cs.RO
发布日期: 2025-08-07
备注: 9 pages, 6 figures, accepted for publication at 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
多臂机器人运动规划中优化技巧的基准测试与策略融合
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多臂机器人 运动规划 轨迹优化 捷径优化 基准测试
📋 核心要点
- 多臂机器人运动规划面临高维度和碰撞避免的挑战,传统方法难以保证轨迹的平滑性和执行效率。
- 论文核心在于系统性地评估和比较现有的轨迹优化(捷径优化)方法,并提出组合策略以提升性能。
- 通过大量模拟实验,分析了各种捷径优化方法的优缺点,并验证了组合策略在性能和效率上的优势。
📝 摘要(中文)
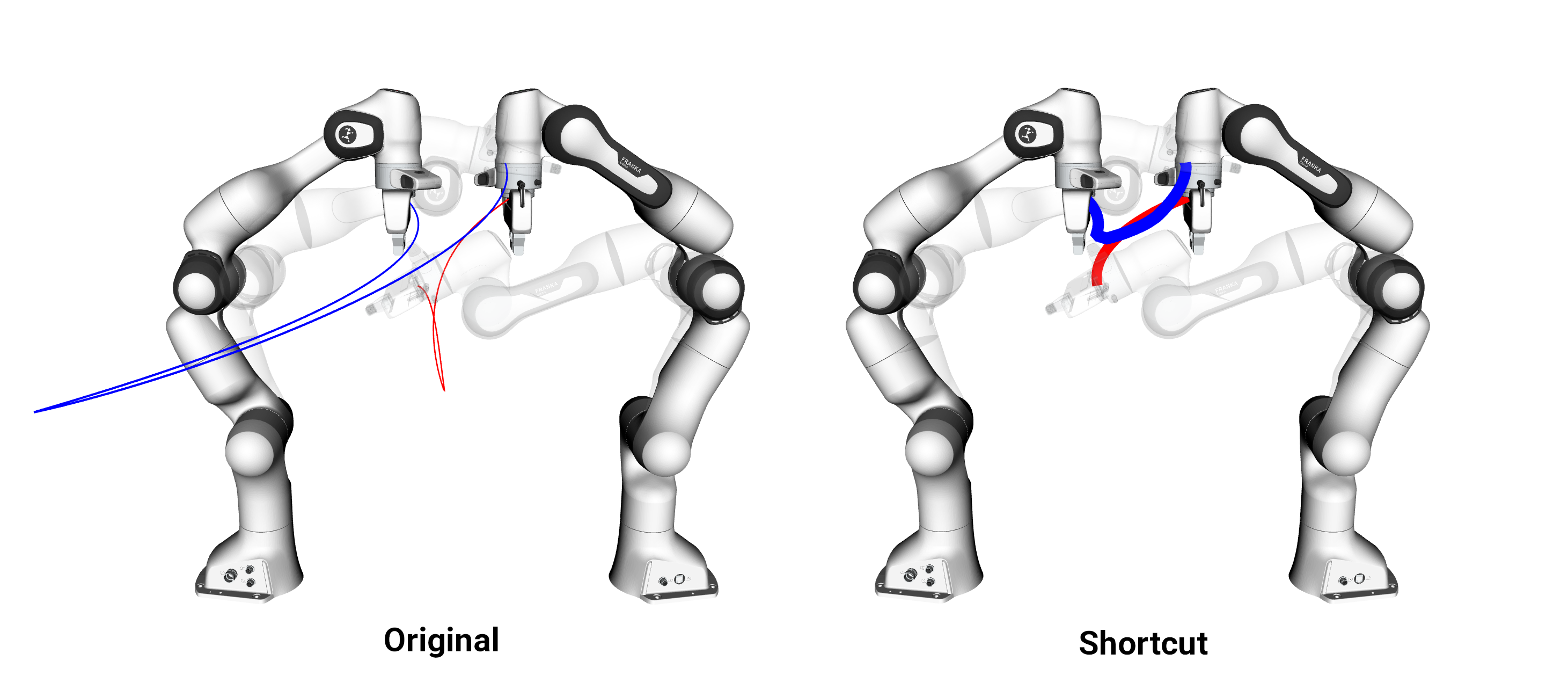
为多臂机器人生成高质量的运动规划轨迹极具挑战,因为系统维度高且臂间容易发生碰撞。传统运动规划方法通常产生次优的运动,在平滑性和多臂系统的执行时间方面表现不佳。通过捷径优化进行后处理是提高运动质量以实现高效和平稳执行的常用方法。然而,在多臂场景中,优化一个手臂的运动不得与其他手臂发生碰撞。尽管现有的多臂规划工作通常使用某种形式的捷径优化技术,但它们的确切方法和对性能的影响通常描述得不够清楚。在这项工作中,我们提出了一个全面的研究,定量比较了现有捷径优化方法在各种模拟场景中对多臂轨迹的影响。我们仔细分析了每种捷径优化方法的优缺点,并提出了两种简单的策略来组合这些方法,以实现最佳的性能-运行时间权衡。
🔬 方法详解
问题定义:多臂机器人运动规划旨在生成无碰撞、平滑且高效的运动轨迹。现有方法,尤其是传统运动规划方法,在高维空间中搜索时效率较低,生成的轨迹往往不够平滑,执行时间较长。此外,在多臂系统中,优化单个手臂的运动必须避免与其他手臂发生碰撞,这增加了问题的复杂性。现有的多臂规划工作通常使用一些轨迹优化技术,但缺乏对其方法和效果的详细分析和比较。
核心思路:论文的核心思路是对现有的轨迹优化(捷径优化)方法进行全面的基准测试,分析其在多臂机器人运动规划中的性能表现。通过对比不同方法的优缺点,提出一种将多种方法组合使用的策略,以在性能和运行时间之间取得最佳平衡。这种组合策略旨在利用不同方法的优势,克服各自的局限性。
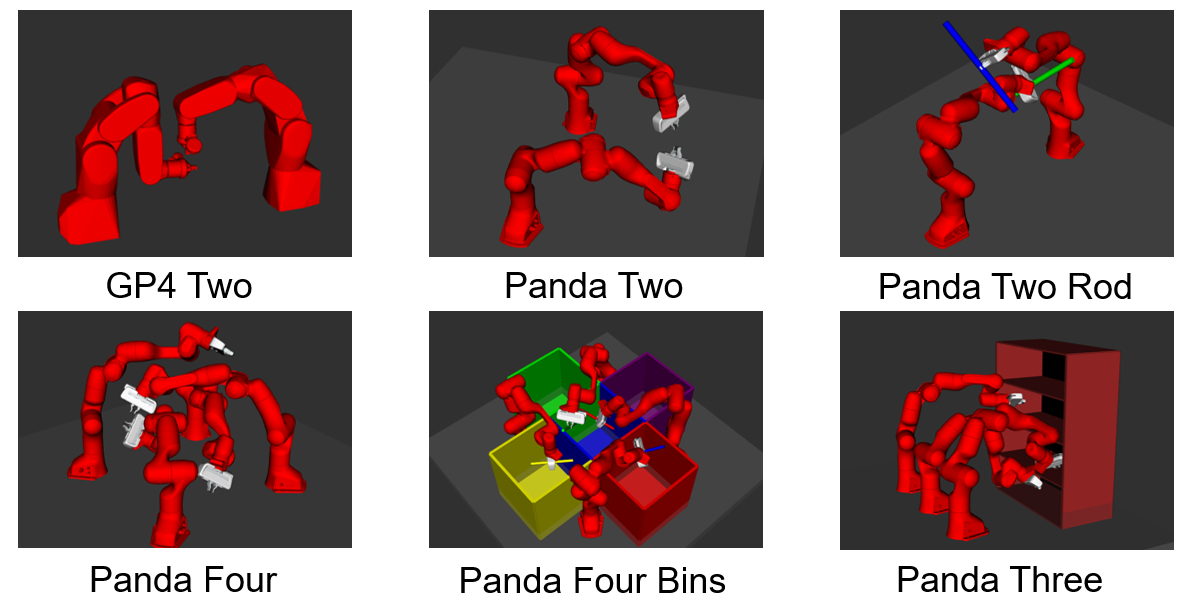
技术框架:该研究的技术框架主要包括以下几个阶段:1) 收集和实现现有的多种轨迹优化(捷径优化)方法。2) 设计多种多臂机器人运动规划场景,包括不同数量的手臂、不同的任务和不同的环境。3) 在这些场景中,对每种捷径优化方法进行测试,并记录其性能指标,如轨迹长度、平滑度、执行时间以及碰撞检测次数。4) 分析实验结果,比较不同方法的优缺点。5) 提出将多种方法组合使用的策略,并验证其有效性。
关键创新:该研究的关键创新在于:1) 对现有的轨迹优化方法进行了全面的基准测试,填补了多臂机器人运动规划领域在这方面的空白。2) 提出了将多种方法组合使用的策略,以在性能和运行时间之间取得最佳平衡。这种组合策略能够根据具体场景选择合适的优化方法,从而提高规划效率和轨迹质量。3) 通过大量的实验验证了所提出的组合策略的有效性。
关键设计:论文的关键设计包括:1) 精心设计的多种多臂机器人运动规划场景,涵盖了不同的任务和环境,以保证实验结果的泛化性。2) 详细的性能指标,包括轨迹长度、平滑度、执行时间以及碰撞检测次数,用于全面评估不同方法的性能。3) 两种简单的组合策略,具体细节未知,但目标是实现性能-运行时间的最优权衡。
🖼️ 关键图片

📊 实验亮点
该研究通过大量模拟实验,定量比较了多种现有捷径优化方法在多臂机器人运动规划中的性能。实验结果表明,不同的方法在不同的场景下表现各异。论文提出的两种简单的组合策略能够有效地结合不同方法的优势,在性能和运行时间之间取得更好的平衡,具体性能提升数据未知。
🎯 应用场景
该研究成果可应用于各种多臂机器人系统,例如工业自动化中的装配线、医疗手术机器人以及家庭服务机器人等。通过优化多臂机器人的运动轨迹,可以提高生产效率、降低能源消耗、提升操作精度和安全性。未来的研究可以进一步探索更复杂的组合策略,并将其应用于实际的机器人系统中。
📄 摘要(原文)
Generating high-quality motion plans for multiple robot arms is challenging due to the high dimensionality of the system and the potential for inter-arm collisions. Traditional motion planning methods often produce motions that are suboptimal in terms of smoothness and execution time for multi-arm systems. Post-processing via shortcutting is a common approach to improve motion quality for efficient and smooth execution. However, in multi-arm scenarios, optimizing one arm's motion must not introduce collisions with other arms. Although existing multi-arm planning works often use some form of shortcutting techniques, their exact methodology and impact on performance are often vaguely described. In this work, we present a comprehensive study quantitatively comparing existing shortcutting methods for multi-arm trajectories across diverse simulated scenarios. We carefully analyze the pros and cons of each shortcutting method and propose two simple strategies for combining these methods to achieve the best performance-runtime tradeoff. Video, code, and dataset are available at https://philip-huang.github.io/mr-shortcut/.