CHILD (Controller for Humanoid Imitation and Live Demonstration): a Whole-Body Humanoid Teleoperation System
作者: Noboru Myers, Obin Kwon, Sankalp Yamsani, Joohyung Kim
分类: cs.RO
发布日期: 2025-07-31 (更新: 2025-09-24)
备注: 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
CHILD:一种全身人形机器人遥操作系统,实现类人模仿与实时演示
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 全身控制 力反馈 可穿戴设备 人机交互 机器人控制
📋 核心要点
- 现有遥操作系统很少支持人形机器人的全身关节级控制,限制了任务的多样性。
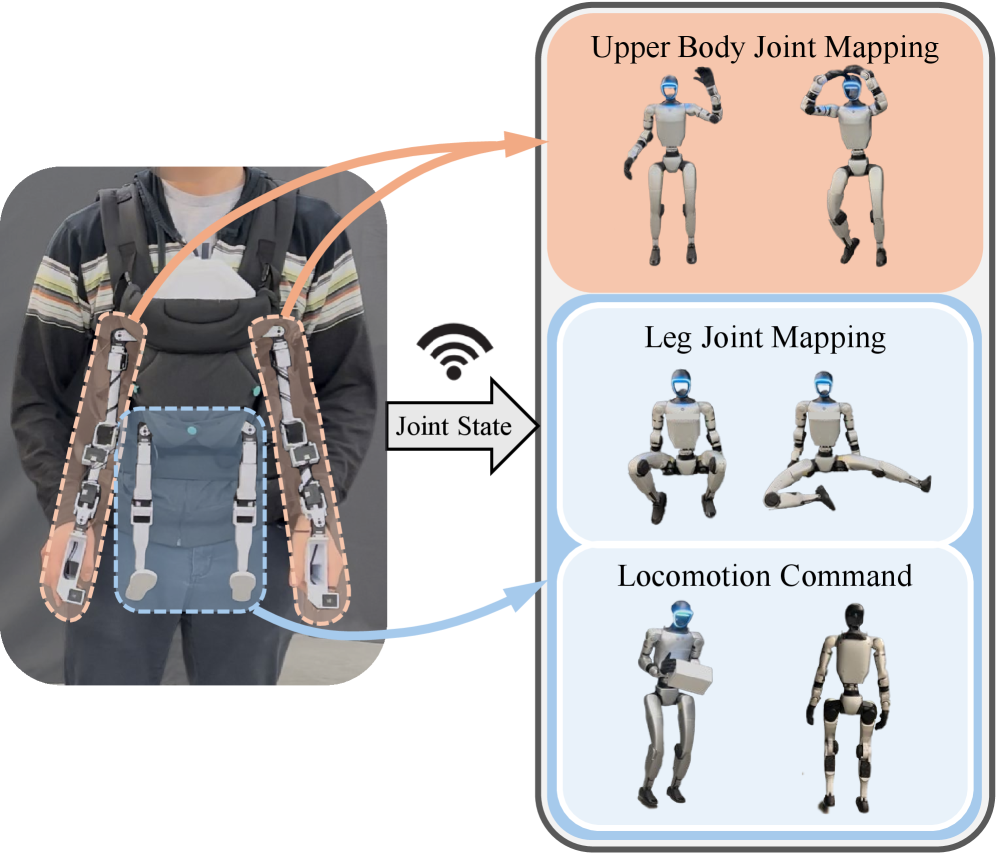
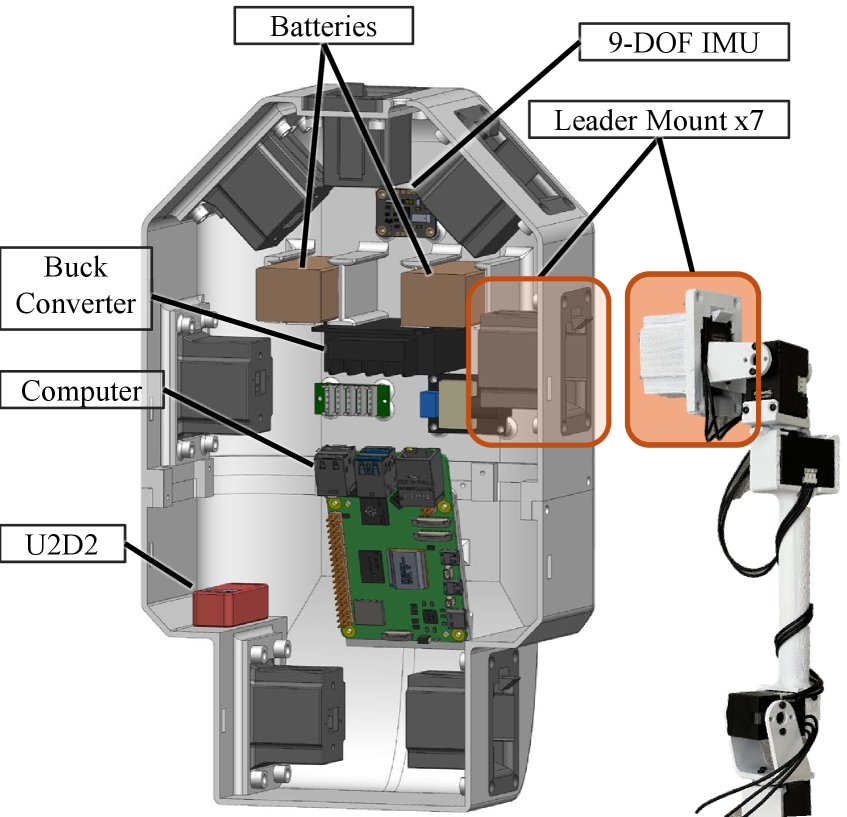
- CHILD系统通过紧凑的可重构硬件,实现对人形机器人的全身关节级遥操作控制。
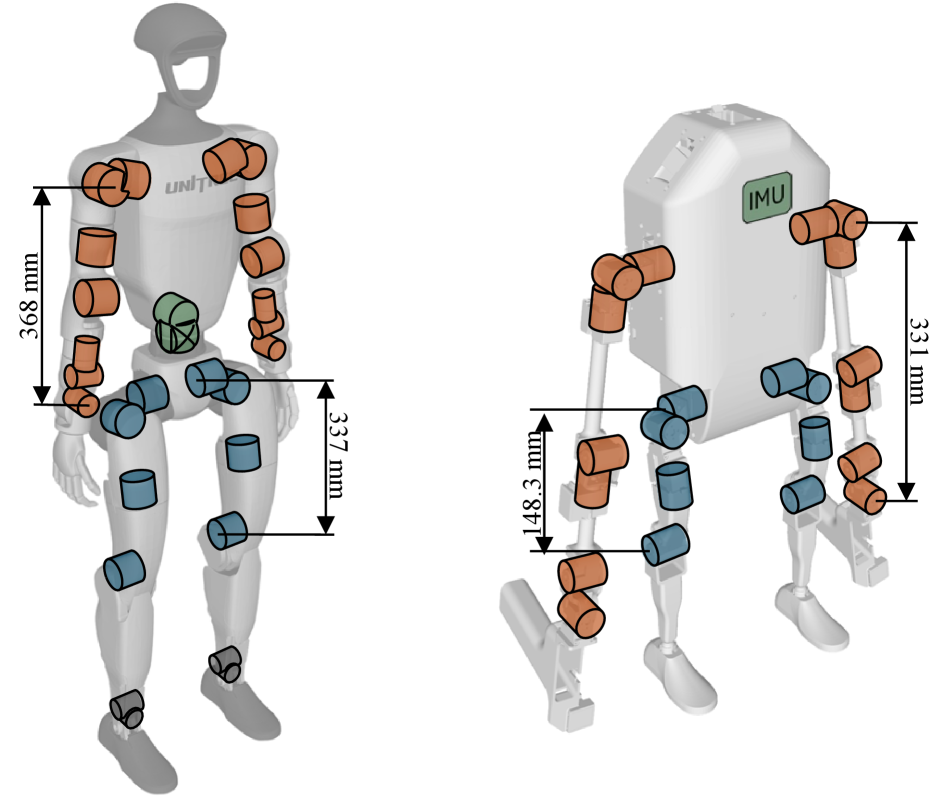
- 通过在人形机器人和双臂系统上的实验,验证了CHILD系统在移动操作和全身控制方面的能力。
📝 摘要(中文)
本文提出了一种紧凑且可重构的遥操作系统——人形模仿与实时演示控制器(CHILD),它能够实现对人形机器人的关节级控制。CHILD系统可以安装在标准的婴儿背带中,使操作者能够控制所有四个肢体,并支持用于全身控制的直接关节映射和移动操作。该系统集成了自适应力反馈,以增强操作者的体验并防止不安全的关节运动。通过在人形机器人和多个双臂系统上进行移动操作和全身控制演示,验证了该系统的能力。此外,我们开源了硬件设计,以提高可访问性和可重复性。更多细节和开源信息可在我们的项目网站上找到:https://uiuckimlab.github.io/CHILD-pages。
🔬 方法详解
问题定义:现有遥操作系统在控制人形机器人时,通常难以实现全身的、关节级别的精细控制。这限制了人形机器人在复杂环境和任务中的应用,例如需要全身协调的装配、维护等任务。现有方法往往侧重于简单的运动控制或预定义的动作序列,缺乏灵活性和实时性。
核心思路:CHILD系统的核心思路是设计一个紧凑、可穿戴的遥操作设备,能够捕捉操作者的全身运动,并将其映射到人形机器人的关节运动上。通过直接的关节映射,操作者可以直观地控制机器人的每一个关节,实现全身的精细操作。同时,系统还集成了力反馈机制,增强操作者的沉浸感和安全性。
技术框架:CHILD系统的整体架构包括三个主要模块:操作者界面、控制系统和机器人平台。操作者界面由可穿戴的传感器组成,用于捕捉操作者的运动。控制系统负责将操作者的运动数据映射到机器人的关节控制指令,并进行力反馈控制。机器人平台是执行控制指令的人形机器人或双臂系统。整个流程是操作者通过穿戴设备进行操作,数据传输到控制系统进行处理,然后控制机器人执行相应的动作,同时机器人将力反馈信息传递给操作者。
关键创新:CHILD系统的关键创新在于其紧凑的可穿戴设计和全身关节级控制能力。与传统的遥操作系统相比,CHILD系统更加便携和易于使用,操作者可以自由地移动和操作。此外,CHILD系统能够实现对机器人全身关节的精细控制,从而可以完成更加复杂和精细的任务。自适应力反馈的加入也提升了操作体验和安全性。
关键设计:CHILD系统的关键设计包括:1) 紧凑的可穿戴传感器设计,使其能够方便地安装在婴儿背带中;2) 自适应力反馈算法,根据机器人的关节状态和环境力,动态调整反馈力的大小;3) 可配置的关节映射方案,允许操作者根据不同的任务需求,自定义关节映射关系。
🖼️ 关键图片
📊 实验亮点
该论文通过在人形机器人和双臂系统上进行实验,验证了CHILD系统的有效性。实验结果表明,操作者可以使用CHILD系统流畅地控制机器人的全身运动,完成复杂的移动操作和全身协调任务。例如,操作者可以控制机器人进行开门、搬运物体等操作。此外,力反馈系统能够有效地防止不安全的关节运动,提高了操作的安全性。
🎯 应用场景
CHILD系统在多个领域具有潜在的应用价值。例如,在危险环境或灾难救援中,操作者可以通过CHILD系统远程控制人形机器人进行搜救和清理工作。在医疗领域,医生可以使用CHILD系统进行远程手术或辅助康复治疗。在工业制造领域,工人可以使用CHILD系统控制机器人进行精细的装配和维护工作。该系统有望提高工作效率、降低安全风险,并扩展人形机器人的应用范围。
📄 摘要(原文)
Recent advances in teleoperation have demonstrated robots performing complex manipulation tasks. However, existing works rarely support whole-body joint-level teleoperation for humanoid robots, limiting the diversity of tasks that can be accomplished. This work presents Controller for Humanoid Imitation and Live Demonstration (CHILD), a compact reconfigurable teleoperation system that enables joint level control over humanoid robots. CHILD fits within a standard baby carrier, allowing the operator control over all four limbs, and supports both direct joint mapping for full-body control and loco-manipulation. Adaptive force feedback is incorporated to enhance operator experience and prevent unsafe joint movements. We validate the capabilities of this system by conducting loco-manipulation and full-body control demonstrations on a humanoid robot and multiple dual-arm systems. Lastly, we open-source the design of the hardware promoting accessibility and reproducibility. Additional details and open-source information are available at our project website: https://uiuckimlab.github.io/CHILD-pages.