FLORES: A Reconfigured Wheel-Legged Robot for Enhanced Steering and Adaptability
作者: Zhicheng Song, Jinglan Xu, Chunxin Zheng, Yulin Li, Zhihai Bi, Jun Ma
分类: cs.RO
发布日期: 2025-07-30
🔗 代码/项目: GITHUB
💡 一句话要点
FLORES:一种新型轮腿机器人,通过重构前腿实现增强的转向和适应性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 轮腿机器人 强化学习 运动控制 地形适应 机器人设计
📋 核心要点
- 现有轮腿机器人设计未能充分利用腿式和轮式结构的优势,限制了系统的灵活性和效率。
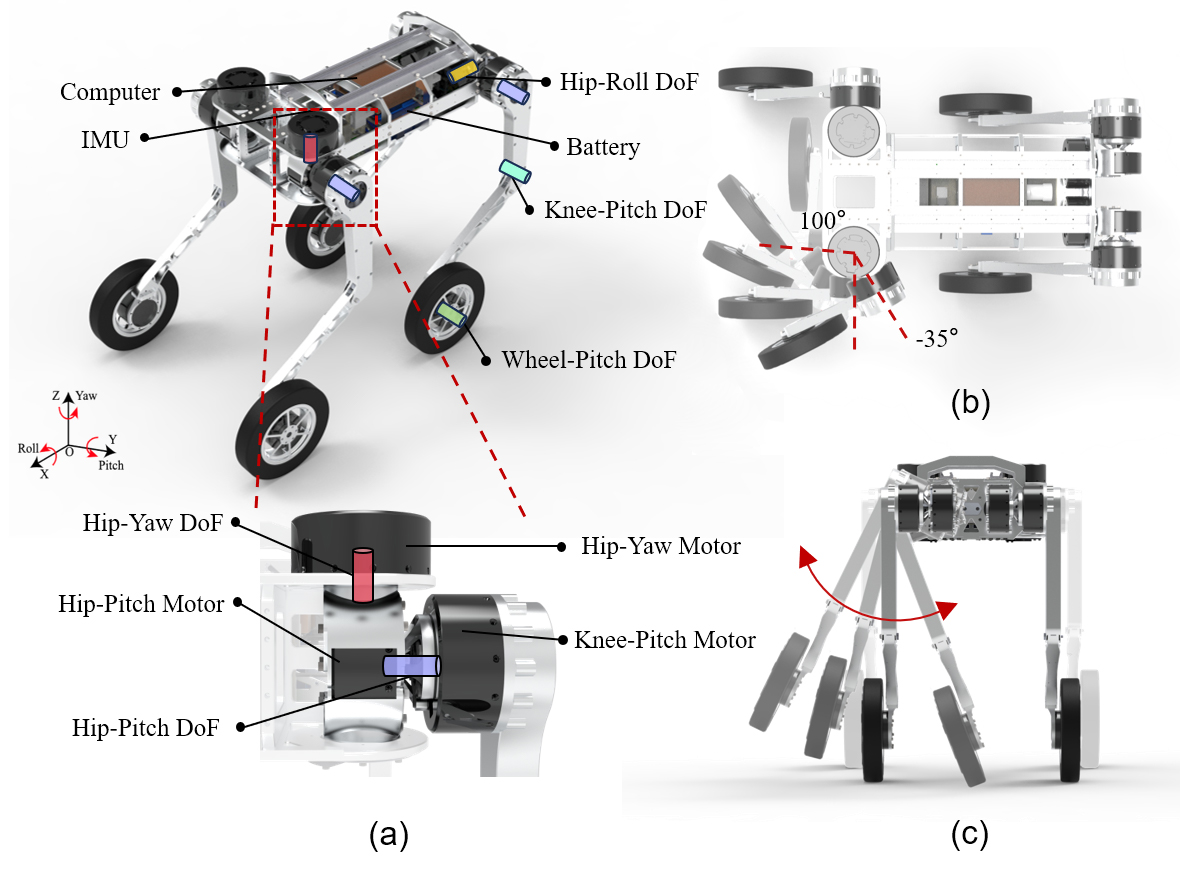
- FLORES通过将前腿的髋关节横滚自由度替换为髋关节偏航自由度,实现了平坦地形的高效运动和复杂地形的适应性。
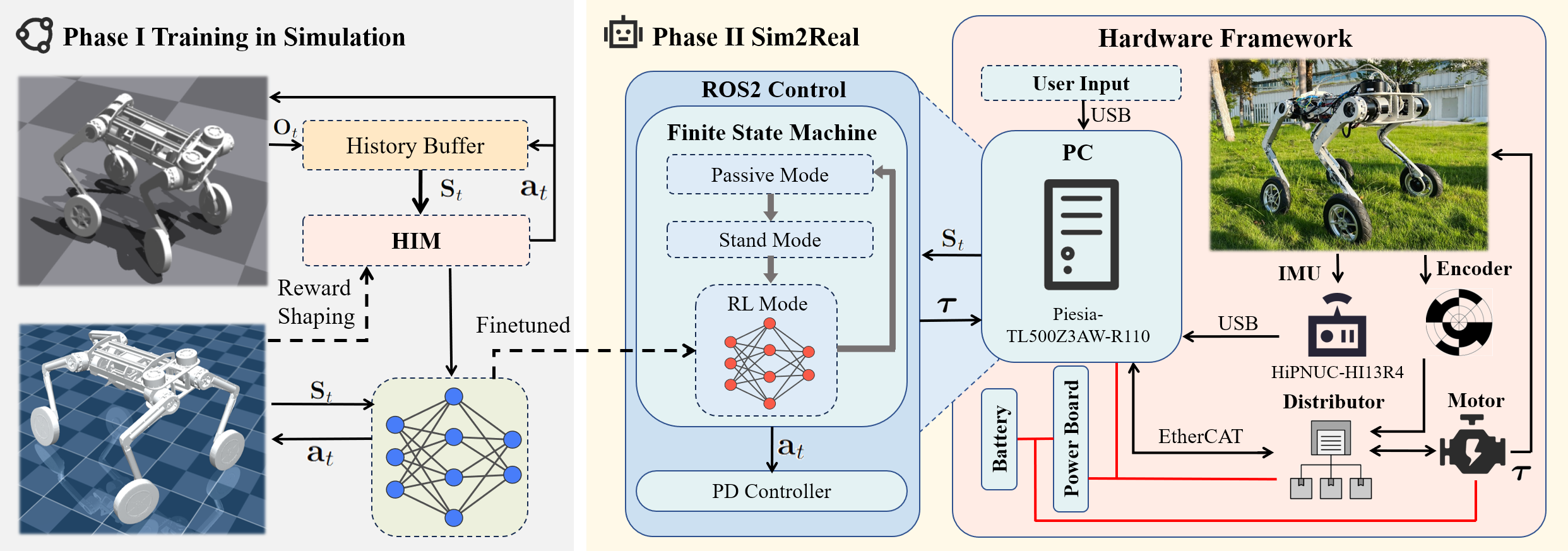
- 定制的强化学习控制器结合混合内部模型和优化奖励结构,使FLORES能够在不同运动模式间平滑切换,并在多种地形上表现出增强的性能。
📝 摘要(中文)
本文提出了一种名为FLORES的新型轮腿机器人,旨在提升转向能力和环境适应性。与传统设计不同,FLORES采用独特的前腿配置,将传统髋关节横滚自由度(DoF)替换为髋关节偏航自由度。这种创新设计既保证了在平坦地面上的高效移动,又确保了在复杂地形中的适应性。该设计促进了不同运动模式(即腿式运动和轮式运动)之间的无缝切换,并优化了在各种环境中的性能。为了充分利用FLORES的机械能力,我们开发了一种定制的强化学习(RL)控制器,该控制器采用混合内部模型(HIM),并结合针对我们独特机械配置优化的定制奖励结构。该框架能够生成自适应的多模态运动策略,从而促进轮式和腿式运动之间的平滑过渡。此外,我们独特的关节设计使机器人能够展示新型且高效的运动步态,从而充分利用两种运动模式的协同优势。通过全面的实验,我们证明了FLORES增强的转向能力、改进的导航效率以及在各种地形中的通用运动能力。
🔬 方法详解
问题定义:现有轮腿机器人在复杂地形的适应性和平坦地形的运动效率之间难以兼顾,传统的髋关节横滚自由度限制了其转向能力和运动模式的切换效率。因此,需要一种能够同时适应多种地形并具备高效转向能力的轮腿机器人。
核心思路:FLORES的核心思路是通过重新配置前腿的关节自由度,将传统的髋关节横滚自由度替换为髋关节偏航自由度。这种设计使得机器人能够更好地利用轮式运动的效率,同时保持腿式运动的适应性,从而实现更灵活的运动模式切换和更强的地形适应能力。
技术框架:FLORES的整体框架包括机械结构设计和控制算法设计两部分。机械结构方面,重点在于前腿的髋关节偏航自由度设计。控制算法方面,采用强化学习方法,结合混合内部模型(HIM)和定制的奖励函数,训练机器人学习在不同地形下的最优运动策略。该框架能够生成自适应的多模态运动策略,实现轮式和腿式运动之间的平滑过渡。
关键创新:FLORES最重要的技术创新点在于前腿的髋关节偏航自由度设计。与传统的髋关节横滚自由度相比,髋关节偏航自由度能够更好地支持轮式运动,提高转向效率,并简化腿式运动的控制。此外,定制的强化学习控制器能够充分利用这种新的机械结构,学习到高效的运动策略。
关键设计:在强化学习控制器的设计中,奖励函数的设计至关重要。论文针对FLORES的独特机械结构,设计了定制的奖励函数,鼓励机器人学习高效的轮式运动和适应性强的腿式运动。混合内部模型(HIM)用于预测机器人的状态,并为强化学习提供指导。具体的参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文通过实验验证了FLORES的增强转向能力、改进的导航效率和通用运动能力。具体性能数据和对比基线未在摘要中明确给出,但强调了FLORES在各种地形下的优越表现。开源项目地址为 https://github.com/ZhichengSong6/FLORES-A-Reconfigured-Wheel-Legged-Robot-for-Enhanced-Steering-and-Adaptability.git,方便研究者复现和进一步研究。
🎯 应用场景
FLORES轮腿机器人具有广泛的应用前景,例如在复杂地形下的搜索救援、工业巡检、农业采摘等领域。其增强的转向能力和地形适应性使其能够在各种复杂环境中高效地完成任务。未来,FLORES有望应用于物流、安防、勘探等领域,为人类提供更安全、高效的服务。
📄 摘要(原文)
Wheel-legged robots integrate the agility of legs for navigating rough terrains while harnessing the efficiency of wheels for smooth surfaces. However, most existing designs do not fully capitalize on the benefits of both legged and wheeled structures, which limits overall system flexibility and efficiency. We present FLORES (reconfigured wheel-legged robot for enhanced steering and adaptability), a novel wheel-legged robot design featuring a distinctive front-leg configuration that sets it beyond standard design approaches. Specifically, FLORES replaces the conventional hip-roll degree of freedom (DoF) of the front leg with hip-yaw DoFs, and this allows for efficient movement on flat surfaces while ensuring adaptability when navigating complex terrains. This innovative design facilitates seamless transitions between different locomotion modes (i.e., legged locomotion and wheeled locomotion) and optimizes the performance across varied environments. To fully exploit FLORES's mechanical capabilities, we develop a tailored reinforcement learning (RL) controller that adapts the Hybrid Internal Model (HIM) with a customized reward structure optimized for our unique mechanical configuration. This framework enables the generation of adaptive, multi-modal locomotion strategies that facilitate smooth transitions between wheeled and legged movements. Furthermore, our distinctive joint design enables the robot to exhibit novel and highly efficient locomotion gaits that capitalize on the synergistic advantages of both locomotion modes. Through comprehensive experiments, we demonstrate FLORES's enhanced steering capabilities, improved navigation efficiency, and versatile locomotion across various terrains. The open-source project can be found at https://github.com/ZhichengSong6/FLORES-A-Reconfigured-Wheel-Legged-Robot-for-Enhanced-Steering-and-Adaptability.git.