A Nonlinear MPC Framework for Loco-Manipulation of Quadrupedal Robots with Non-Negligible Manipulator Dynamics
作者: Ruturaj Sambhus, Kapi Ketan Mehta, Ali MirMohammad Sadeghi, Basit Muhammad Imran, Jeeseop Kim, Taizoon Chunawala, Vittorio Pastore, Sujith Vijayan, Kaveh Akbari Hamed
分类: cs.RO, math.OC
发布日期: 2025-07-29
💡 一句话要点
提出一种非线性MPC框架,用于解决四足机器人非轻量级机械臂的协同操作控制问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 协同操作 非线性模型预测控制 运动规划 全身控制
📋 核心要点
- 四足机器人协同操作任务复杂,需要能处理高自由度模型的计算高效的MPC算法。
- 该论文提出一种分解策略,将运动模板模型与机械臂的完整动力学模型结合,实现扭矩级别的控制。
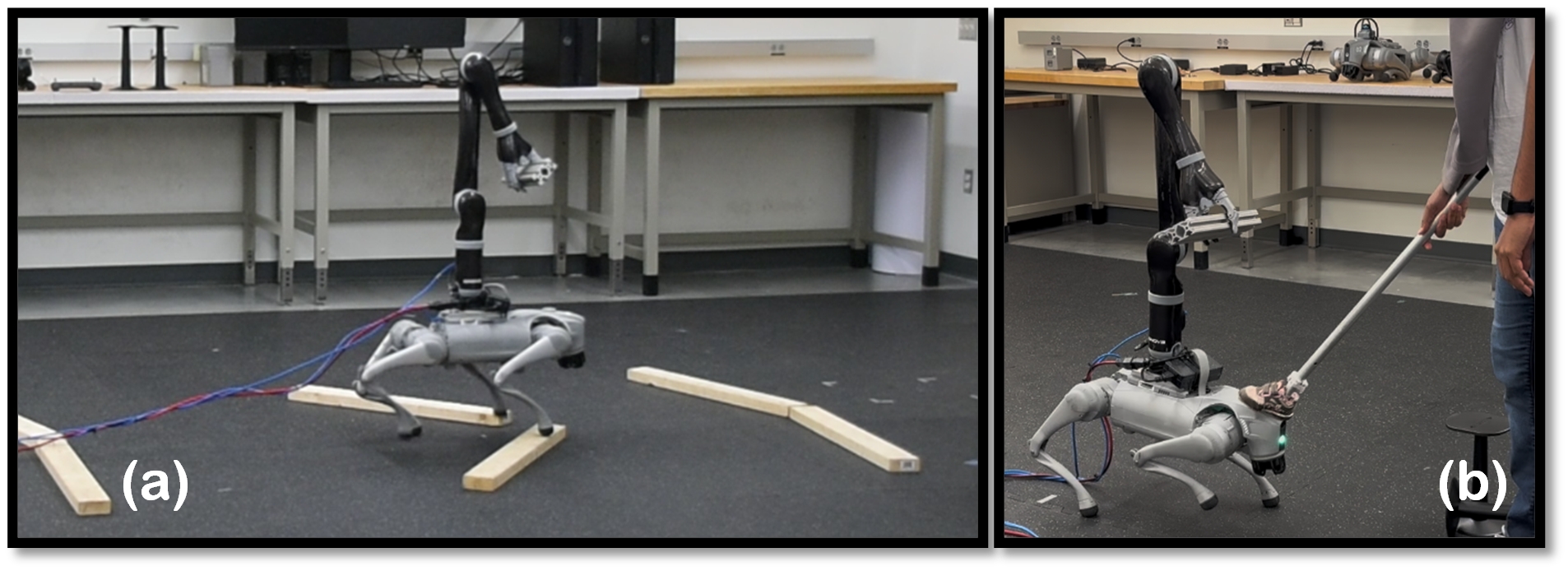
- 实验表明,该框架在处理外部干扰、有效载荷变化和不平坦地形时表现出强大的稳定性。
📝 摘要(中文)
本文提出了一种计算高效的非线性模型预测控制(NMPC)框架,专为配备机械臂的四足机器人的协同操作任务设计,其中机械臂的动力学相对于四足机器人本体不可忽略。该框架采用了一种分解策略,将运动模板模型(如单刚体(SRB)模型)与机械臂的完整动力学模型相结合,以实现扭矩级别的控制。这种分解使得NMPC问题能够在后退视界中以60 Hz的频率进行高效的实时求解。NMPC生成的用于运动的最优状态和输入轨迹由一个以500 Hz运行的低级非线性全身控制器(WBC)跟踪,而机械臂的最优扭矩指令则直接应用。通过大量的数值模拟和硬件实验,在一个15公斤的宇树Go2四足机器人上验证了该分层控制架构,该机器人配备了一个4.4公斤的4自由度Kinova机械臂。实验结果表明,即使Kinova机械臂的动力学相对于Go2本体不可忽略,所提出的NMPC框架在执行各种协同操作任务时也表现出强大的稳定性,能够有效地处理外部干扰、有效载荷变化和不平坦地形。
🔬 方法详解
问题定义:现有的四足机器人协同操作控制方法在处理具有非轻量级机械臂的机器人时,往往面临计算复杂度高、难以实时控制的问题。机械臂的动力学特性不可忽略,使得整个系统的模型变得复杂,传统的MPC方法难以满足实时性要求。因此,需要一种能够在计算资源有限的情况下,实现对高自由度四足机器人及其机械臂进行有效控制的方法。
核心思路:该论文的核心思路是将四足机器人的运动控制和机械臂的力矩控制解耦,分别使用不同的模型和控制器。对于四足机器人的运动,采用简化的模板模型(如单刚体模型)进行预测控制,降低计算复杂度;对于机械臂,则采用完整的动力学模型进行力矩控制,保证控制精度。通过这种分解策略,可以在保证控制性能的同时,显著降低计算负担。
技术框架:该框架采用分层控制架构。顶层是NMPC控制器,它基于简化的四足机器人运动模型,生成最优的运动状态和输入轨迹。中间层是全身控制器(WBC),它以500Hz的频率跟踪NMPC生成的运动轨迹,并将其转化为具体的关节力矩指令。底层直接将NMPC生成的机械臂力矩指令发送给机械臂控制器。整个框架包含运动规划层(NMPC)和执行层(WBC和机械臂控制器)。
关键创新:该论文的关键创新在于将简化的运动模板模型与机械臂的完整动力学模型相结合,用于NMPC控制器的设计。这种分解策略能够在保证控制性能的同时,显著降低计算复杂度,使得NMPC能够在实时性要求较高的四足机器人协同操作任务中应用。此外,直接将NMPC生成的机械臂力矩指令应用于机械臂控制器,避免了额外的轨迹跟踪误差。
关键设计:NMPC控制器采用后退视界控制策略,以60Hz的频率进行优化求解。运动模板模型采用单刚体模型,简化了四足机器人的动力学方程。机械臂的动力学模型则采用完整的刚体动力学方程。损失函数包含对状态、输入和力矩的惩罚项,以保证控制的平滑性和稳定性。全身控制器(WBC)采用非线性控制方法,以提高轨迹跟踪精度。
🖼️ 关键图片


📊 实验亮点
该论文通过数值模拟和硬件实验验证了所提出的NMPC框架的有效性。实验结果表明,即使在存在外部干扰、有效载荷变化和不平坦地形的情况下,该框架也能保证四足机器人的稳定性和控制精度。在配备4.4公斤Kinova机械臂的15公斤宇树Go2四足机器人上,该框架能够以60Hz的频率进行实时控制,证明了其计算效率。
🎯 应用场景
该研究成果可广泛应用于物流、救援、巡检等领域。例如,在仓库中,四足机器人可以利用机械臂抓取和搬运货物;在灾难现场,可以利用机械臂清理障碍物或进行搜救;在复杂环境中,可以利用机械臂进行设备维护和检测。该技术能够提升机器人在复杂环境下的适应性和操作能力,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Model predictive control (MPC) combined with reduced-order template models has emerged as a powerful tool for trajectory optimization in dynamic legged locomotion. However, loco-manipulation tasks performed by legged robots introduce additional complexity, necessitating computationally efficient MPC algorithms capable of handling high-degree-of-freedom (DoF) models. This letter presents a computationally efficient nonlinear MPC (NMPC) framework tailored for loco-manipulation tasks of quadrupedal robots equipped with robotic manipulators whose dynamics are non-negligible relative to those of the quadruped. The proposed framework adopts a decomposition strategy that couples locomotion template models -- such as the single rigid body (SRB) model -- with a full-order dynamic model of the robotic manipulator for torque-level control. This decomposition enables efficient real-time solution of the NMPC problem in a receding horizon fashion at 60 Hz. The optimal state and input trajectories generated by the NMPC for locomotion are tracked by a low-level nonlinear whole-body controller (WBC) running at 500 Hz, while the optimal torque commands for the manipulator are directly applied. The layered control architecture is validated through extensive numerical simulations and hardware experiments on a 15-kg Unitree Go2 quadrupedal robot augmented with a 4.4-kg 4-DoF Kinova arm. Given that the Kinova arm dynamics are non-negligible relative to the Go2 base, the proposed NMPC framework demonstrates robust stability in performing diverse loco-manipulation tasks, effectively handling external disturbances, payload variations, and uneven terrain.