Fluidically Innervated Lattices Make Versatile and Durable Tactile Sensors
作者: Annan Zhang, Miguel Flores-Acton, Andy Yu, Anshul Gupta, Maggie Yao, Daniela Rus
分类: cs.RO, cs.LG, eess.SY
发布日期: 2025-07-28 (更新: 2025-09-17)
备注: Accepted for publication in the proceedings of the 2025 International Symposium on Experimental Robotics (ISER)
💡 一句话要点
提出流体神经支配的弹性体点阵触觉传感器,用于多功能和耐用的机器人操作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉传感 软体机器人 流体神经支配 弹性体点阵 3D打印
📋 核心要点
- 传统触觉传感器依赖复杂材料和设计,制造困难且成本高昂,限制了其在机器人领域的广泛应用。
- 论文提出一种基于流体神经支配的软体机器人指尖,利用嵌入气道的弹性体点阵结构实现触觉感知。
- 实验验证了该传感器在接触位置和力估计方面的准确性,以及在高冲击和循环载荷下的耐久性。
📝 摘要(中文)
本文介绍了一种集成了触觉传感的被动式软体机器人指尖,该指尖采用3D打印的弹性体点阵结构,并嵌入了气道。这种被称为流体神经支配的传感方法,通过检测密封气道内的压力变化,将点阵转化为触觉传感器,为机器人触觉传感提供了一种简单而稳健的解决方案。与依赖复杂材料或设计的传统方法不同,流体神经支配提供了一种简单、可扩展的单材料制造工艺。我们对传感器的响应进行了表征,开发了一个几何模型来估计指尖位移,并训练了一个神经网络来准确预测接触位置和接触力。此外,我们将指尖与导纳控制器集成,以模拟类似弹簧的行为,展示了其通过触觉反馈进行环境探索的能力,并验证了其在高冲击和循环载荷条件下的耐久性。这种触觉传感技术在简单性、适应性和耐久性方面具有优势,并为多功能机器人操作开辟了新的机会。
🔬 方法详解
问题定义:现有触觉传感器通常依赖于复杂的材料和设计,这导致了制造过程的复杂性和成本的增加。此外,许多传感器在耐用性方面存在问题,难以在恶劣环境下可靠工作。因此,需要一种简单、耐用且易于制造的触觉传感解决方案,以满足机器人操作的需求。
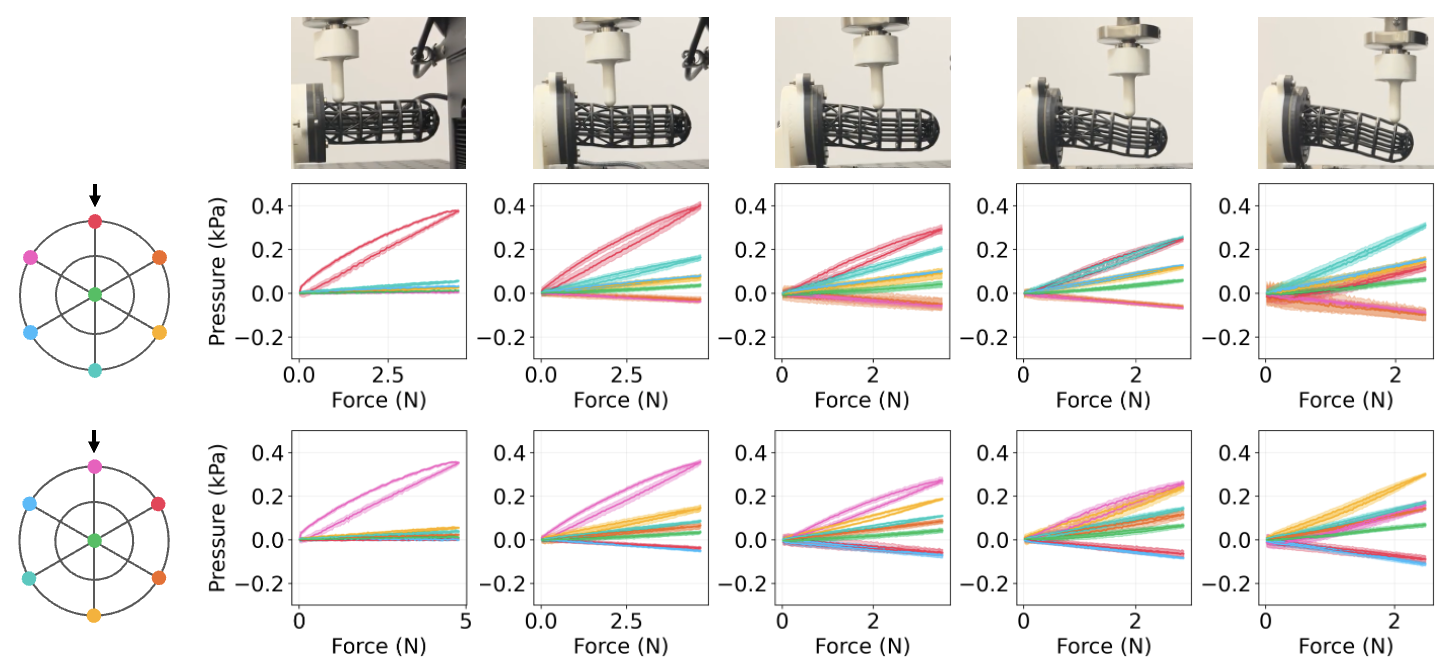
核心思路:论文的核心思路是利用流体神经支配的概念,将弹性体点阵结构与嵌入式气道相结合,通过检测气道内的压力变化来实现触觉感知。这种设计利用了气体的可压缩性,使得传感器能够对微小的力变化做出响应,同时保持结构的柔性和耐用性。
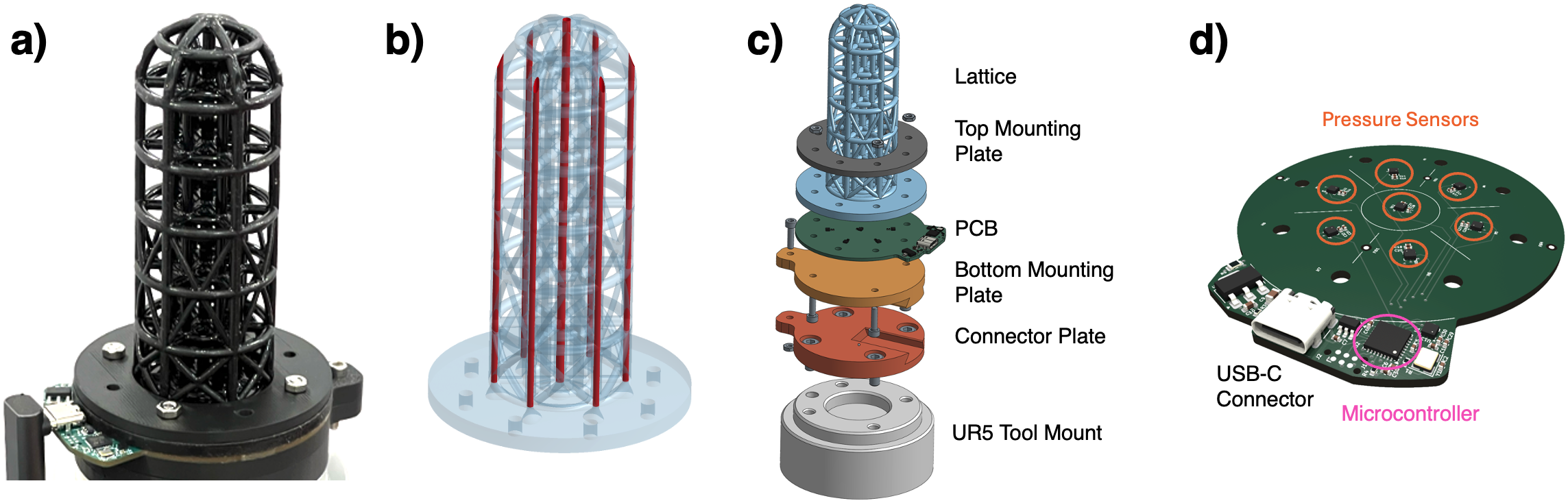
技术框架:该触觉传感器的整体框架包括以下几个主要部分:1) 3D打印的弹性体点阵结构,作为传感器的物理基础;2) 嵌入在点阵结构中的密封气道,用于传递压力变化;3) 压力传感器,用于测量气道内的压力;4) 信号处理和机器学习模块,用于将压力数据转换为接触位置和力估计。整个流程为:外部接触 -> 点阵形变 -> 气道压力变化 -> 压力传感器测量 -> 信号处理与机器学习 -> 接触位置和力估计。
关键创新:该论文最重要的技术创新点在于将流体神经支配的概念应用于软体机器人触觉传感。与传统的触觉传感器相比,该方法具有以下优势:1) 采用单材料制造,简化了制造过程;2) 结构简单,易于扩展和定制;3) 耐用性高,能够承受高冲击和循环载荷;4) 成本低廉,易于大规模生产。
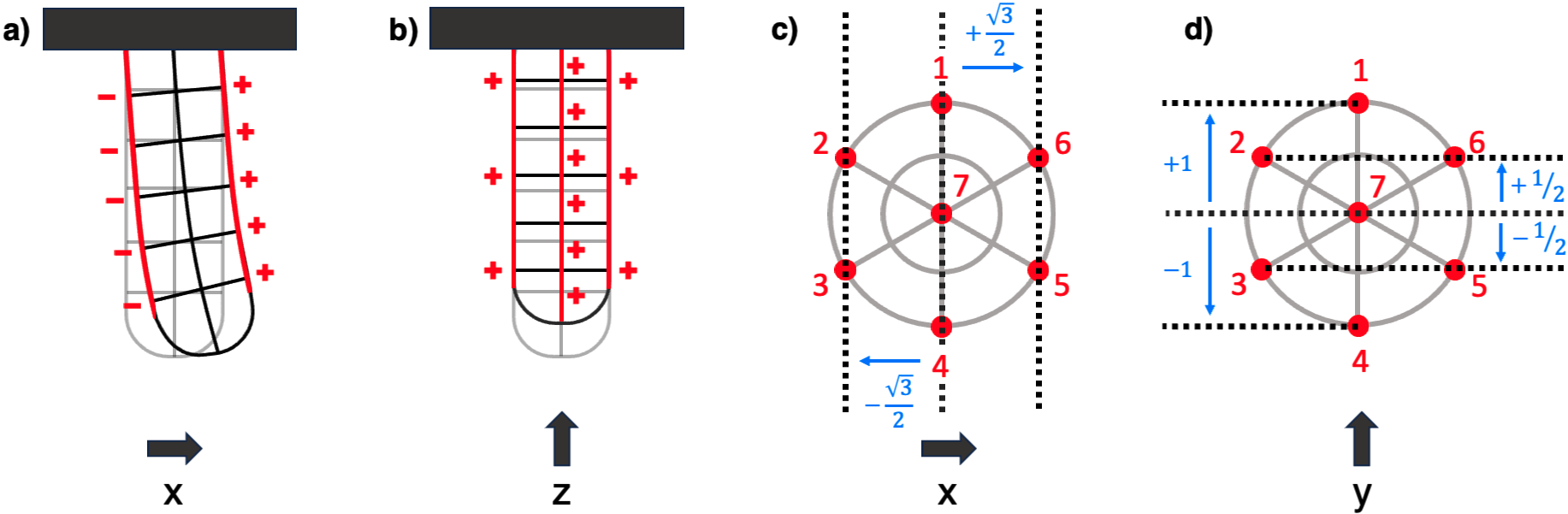
关键设计:关键设计包括:1) 点阵结构的几何参数,如单元尺寸、连接方式等,这些参数影响传感器的灵敏度和力学性能;2) 气道的布局和尺寸,这些参数影响压力传递的效率和传感器的响应速度;3) 压力传感器的选择,需要考虑灵敏度、精度和响应时间等因素;4) 神经网络的结构和训练方法,用于提高接触位置和力估计的准确性。论文中使用了特定的几何模型来估计指尖位移,并训练了一个神经网络来预测接触位置和力。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该触觉传感器能够准确地预测接触位置和接触力。通过训练神经网络,接触位置的预测误差降低至可接受范围。耐久性测试表明,该传感器在高冲击和循环载荷条件下仍能保持良好的性能,验证了其在恶劣环境下的可靠性。此外,该指尖与导纳控制器集成后,能够模拟类似弹簧的行为,并实现通过触觉反馈进行环境探索。
🎯 应用场景
该研究成果可广泛应用于机器人操作、人机交互、医疗康复等领域。例如,在精细物体操作中,该触觉传感器可以帮助机器人更好地感知物体的形状、硬度和位置,从而实现更精确的抓取和操作。在人机交互中,该传感器可以用于构建更自然、更安全的交互界面。在医疗康复领域,该传感器可以用于监测患者的运动状态和康复进度。
📄 摘要(原文)
Tactile sensing plays a fundamental role in enabling robots to navigate dynamic and unstructured environments, particularly in applications such as delicate object manipulation, surface exploration, and human-robot interaction. In this paper, we introduce a passive soft robotic fingertip with integrated tactile sensing, fabricated using a 3D-printed elastomer lattice with embedded air channels. This sensorization approach, termed fluidic innervation, transforms the lattice into a tactile sensor by detecting pressure changes within sealed air channels, providing a simple yet robust solution to tactile sensing in robotics. Unlike conventional methods that rely on complex materials or designs, fluidic innervation offers a simple, scalable, single-material fabrication process. We characterize the sensors' response, develop a geometric model to estimate tip displacement, and train a neural network to accurately predict contact location and contact force. Additionally, we integrate the fingertip with an admittance controller to emulate spring-like behavior, demonstrate its capability for environment exploration through tactile feedback, and validate its durability under high impact and cyclic loading conditions. This tactile sensing technique offers advantages in terms of simplicity, adaptability, and durability and opens up new opportunities for versatile robotic manipulation.