Sampling-Based Global Optimal Control and Estimation via Semidefinite Programming
作者: Antoine Groudiev, Fabian Schramm, Éloïse Berthier, Justin Carpentier, Frederike Dümbgen
分类: cs.RO
发布日期: 2025-07-23 (更新: 2025-10-01)
💡 一句话要点
提出基于半正定规划的采样全局最优控制与估计方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 全局优化 半正定规划 KernelSOS 机器人控制 轨迹优化
📋 核心要点
- 现有全局优化方法在实际机器人控制和估计问题中面临挑战,例如高维、非参数和黑盒模拟器。
- 论文提出将 Kernel Sum of Squares (KernelSOS) 理论应用于实际,结合局部求解器,提升全局优化效果。
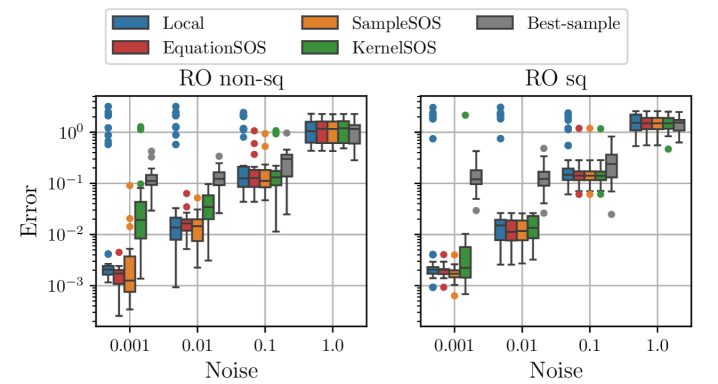
- 实验表明,KernelSOS 在机器人定位和轨迹优化等问题上,与现有方法相比具有竞争力,且能发现更高质量的解。
📝 摘要(中文)
全局优化近年来备受关注,这得益于理论基础和高效数值程序的进步。其中,Kernel Sum of Squares (KernelSOS) 提供了一个强大的理论框架,它结合了核方法的表达能力和 SOS 优化的保证。本文将 KernelSOS 从理论转化为实践,并在具有挑战性的控制和机器人问题上展示了它的应用。我们识别并解决了在应用环境中使该方法有效所需的实际考虑因素:重启策略、超参数的系统校准、恢复极小值的方法以及与快速局部求解器的结合。作为概念验证,KernelSOS 在机器人定位中的应用突出了其与现有 SOS 方法的竞争力,后者依赖于启发式方法和手工设计的重构来使问题多项式化。即使在具有模拟器作为黑盒的高维非参数轨迹优化设置中,我们也展示了 KernelSOS 如何与快速局部求解器结合,以在不影响总体运行时间的情况下发现更高质量的解决方案。
🔬 方法详解
问题定义:论文旨在解决机器人控制和估计中的全局优化问题,特别是当系统模型复杂(例如,使用黑盒模拟器描述)或问题维度较高时。现有的 SOS 方法通常需要手工设计的重构或启发式方法来将问题转化为多项式形式,这限制了它们的适用性和效率。此外,在高维非参数设置下,找到全局最优解变得更加困难。
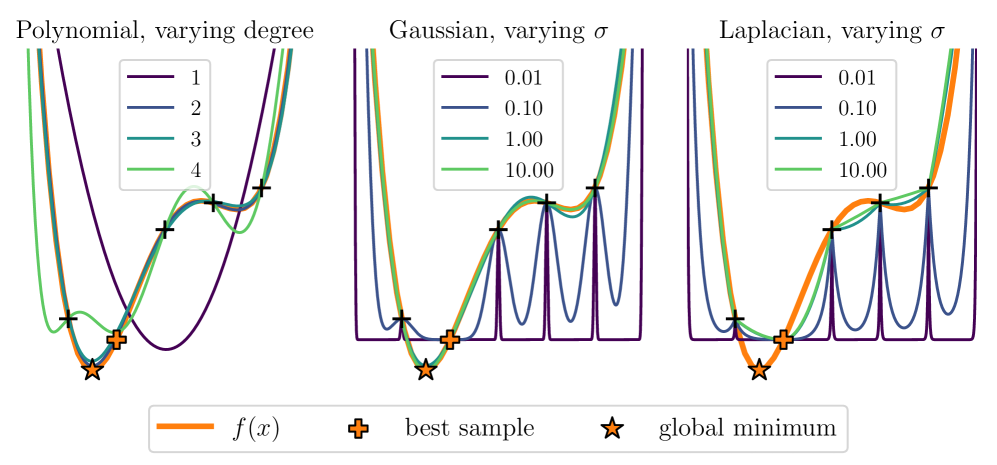
核心思路:论文的核心思路是将 KernelSOS 理论应用于实际的机器人控制和估计问题。KernelSOS 结合了核方法的表达能力和 SOS 优化的保证,能够在非参数空间中进行全局优化。通过结合快速局部求解器,可以在不牺牲运行时间的情况下,找到更高质量的解。
技术框架:整体框架包括以下几个主要步骤:1) 使用采样方法在状态空间中生成样本点。2) 基于 KernelSOS 构建半正定规划 (SDP) 问题。3) 使用 SDP 求解器找到全局最优解的近似。4) 使用局部求解器对全局最优解进行精细化。5) 采用重启策略和超参数校准方法来提高算法的鲁棒性和性能。
关键创新:论文的关键创新在于将 KernelSOS 理论应用于实际的机器人控制和估计问题,并解决了在应用过程中遇到的实际挑战,例如超参数校准、极小值恢复和与局部求解器的结合。此外,论文还展示了 KernelSOS 在高维非参数轨迹优化问题中的应用,证明了其在复杂系统中的有效性。
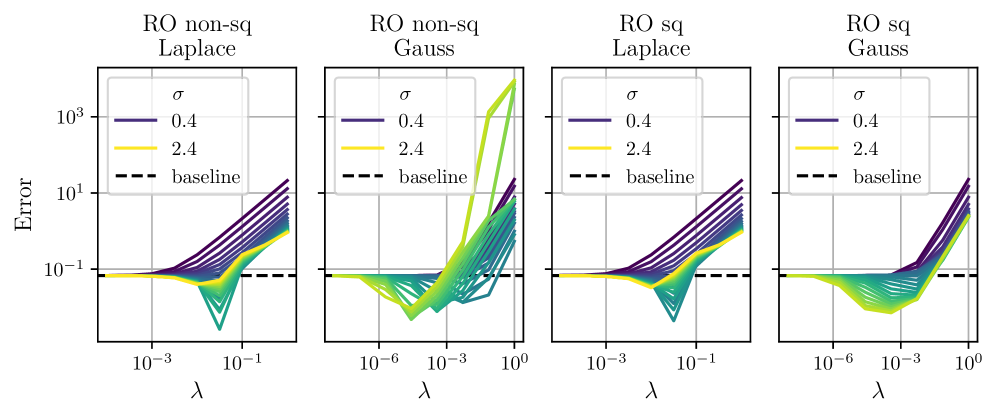
关键设计:论文中涉及的关键设计包括:1) 核函数的选择和超参数的校准,这直接影响了 KernelSOS 的表达能力和优化性能。2) 重启策略的设计,用于避免陷入局部最优解。3) 局部求解器的选择和集成,用于提高解的精度和效率。4) 半正定规划问题的构建,需要仔细考虑问题的规模和求解器的性能。
🖼️ 关键图片
📊 实验亮点
论文通过实验验证了 KernelSOS 在机器人定位和轨迹优化问题上的有效性。在机器人定位问题中,KernelSOS 与现有的 SOS 方法相比具有竞争力。在高维非参数轨迹优化问题中,KernelSOS 能够与快速局部求解器结合,在不影响总体运行时间的情况下,找到更高质量的解。这些实验结果表明,KernelSOS 是一种有前景的全局优化方法。
🎯 应用场景
该研究成果可应用于机器人定位、运动规划、轨迹优化、控制系统设计等领域。通过全局优化方法,可以提高机器人的自主性和鲁棒性,使其能够在复杂环境中执行任务。此外,该方法还可以应用于其他需要全局优化的领域,例如金融建模、生物信息学等。
📄 摘要(原文)
Global optimization has gained attraction over the past decades, thanks to the development of both theoretical foundations and efficient numerical routines. Among recent advances, Kernel Sum of Squares (KernelSOS) provides a powerful theoretical framework, combining the expressivity of kernel methods with the guarantees of SOS optimization. In this paper, we take KernelSOS from theory to practice and demonstrate its use on challenging control and robotics problems. We identify and address the practical considerations required to make the method work in applied settings: restarting strategies, systematic calibration of hyperparameters, methods for recovering minimizers, and the combination with fast local solvers. As a proof of concept, the application of KernelSOS to robot localization highlights its competitiveness with existing SOS approaches that rely on heuristics and handcrafted reformulations to render the problem polynomial. Even in the high-dimensional, non-parametric setting of trajectory optimization with simulators treated as black boxes, we demonstrate how KernelSOS can be combined with fast local solvers to uncover higher-quality solutions without compromising overall runtimes.