An Exploratory Study on Human-Robot Interaction using Semantics-based Situational Awareness
作者: Tianshu Ruan, Aniketh Ramesh, Rustam Stolkin, Manolis Chiou
分类: cs.RO
发布日期: 2025-07-23 (更新: 2025-09-02)
💡 一句话要点
提出基于语义信息的环境评估方法,提升人机协作在灾难响应中的效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机交互 人机协作 情境感知 语义信息 灾难响应 机器人 自主等级
📋 核心要点
- 现有的人机协作研究中,高层语义信息的利用不足,难以有效提升复杂任务中的情境感知能力。
- 论文提出一种基于语义信息的环境评估框架,旨在提升人机团队在灾难响应等场景下的协作效率。
- 实验结果表明,该方法能够减轻操作员的工作量,增强对情境感知的信任,并缩短自主等级切换的反应时间。
📝 摘要(中文)
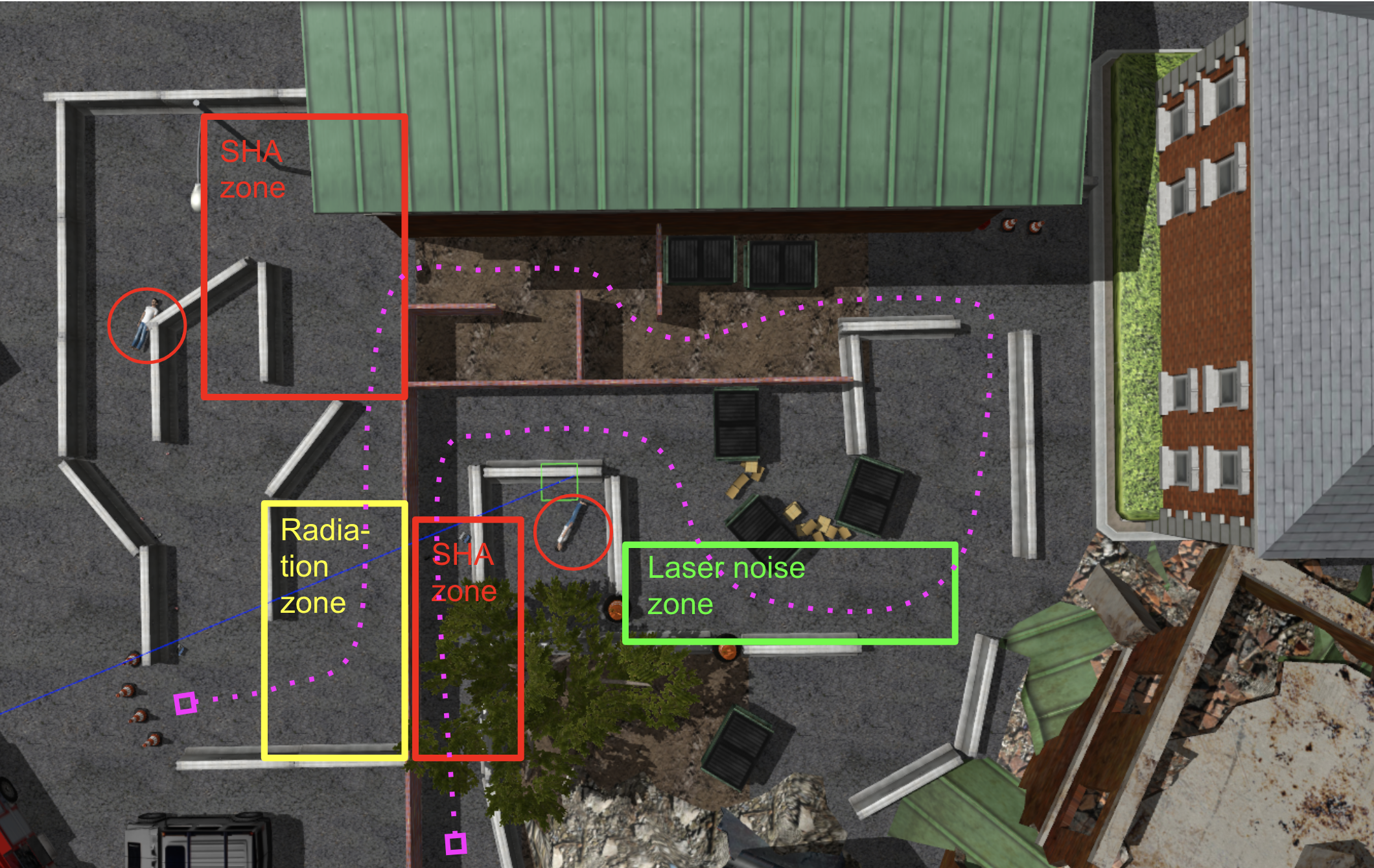
本文研究了高层语义(环境评估)对移动机器人部署背景下的人机团队(HRT)和人机交互(HRI)的影响。尽管语义在人工智能领域已被广泛研究,但高层语义如何使HRT受益的研究不足,通常模糊且难以处理。我们应用了一个基于语义的框架,该框架可以揭示模拟灾难响应任务中环境的不同指标(即存在多少语义信息)。在此类任务中,语义至关重要,因为HRT应处理复杂情况并快速做出正确的决策,而人类可能面临高工作量和压力。特别是当人类操作员需要在机器人和其他任务之间转移注意力时,他们将难以快速建立情境感知(SA)。实验表明,所提出的语义:1)减轻了人类操作员的感知工作量;2)增加了操作员对SA的信任;3)有助于减少在需要时切换自主等级的反应时间。此外,我们发现对系统具有较高信任度的参与者更倾向于在高层语义的鼓励下使用遥操作模式。
🔬 方法详解
问题定义:论文旨在解决人机协作中,人类操作员在复杂环境下难以快速建立情境感知的问题。现有方法通常缺乏对环境高层语义信息的有效利用,导致操作员工作负荷过高,决策效率降低,尤其是在灾难响应等需要快速反应的场景中。
核心思路:论文的核心思路是利用语义信息来增强机器人对环境的理解,并将这些信息以易于理解的方式呈现给人类操作员。通过提供高层语义信息,帮助操作员快速了解环境状况,从而减轻工作负荷,提高决策效率,并增强对系统的信任。
技术框架:该框架包含以下主要模块:1) 语义信息提取模块:从机器人传感器数据中提取环境的语义信息,例如物体类别、空间关系等。具体实现方法未知。2) 情境感知构建模块:利用提取的语义信息构建环境的情境感知模型,该模型能够反映环境的整体状态和关键特征。3) 人机交互界面:将情境感知模型以直观的方式呈现给人类操作员,例如通过可视化界面显示环境中的物体、危险区域等。4) 自主等级切换机制:根据操作员的指令或环境的变化,动态调整机器人的自主等级。
关键创新:论文的关键创新在于将高层语义信息引入人机协作框架,并验证了其在提升情境感知、减轻工作负荷和提高决策效率方面的有效性。与传统方法相比,该方法能够更有效地利用环境信息,从而提高人机协作的整体性能。
关键设计:论文中没有明确说明关键参数设置、损失函数、网络结构等技术细节。语义信息提取的具体方法未知,情境感知模型的构建方式也未详细描述。人机交互界面的设计是影响用户体验的关键因素,但论文中没有提供相关细节。
🖼️ 关键图片

📊 实验亮点
实验结果表明,所提出的基于语义信息的环境评估方法能够显著减轻人类操作员的感知工作量,提高操作员对情境感知的信任度,并缩短在需要时切换自主等级的反应时间。此外,实验还发现,对系统具有较高信任度的参与者更倾向于在高层语义的鼓励下使用遥操作模式。具体的性能数据和提升幅度未知。
🎯 应用场景
该研究成果可应用于灾难救援、安防巡逻、工业自动化等领域。通过提升人机协作效率,可以更好地应对复杂环境下的挑战,提高任务完成质量,降低人员风险。未来,该方法有望与增强现实、虚拟现实等技术结合,进一步提升人机交互的沉浸感和效率。
📄 摘要(原文)
In this paper, we investigate the impact of high-level semantics (evaluation of the environment) on Human-Robot Teams (HRT) and Human-Robot Interaction (HRI) in the context of mobile robot deployments. Although semantics has been widely researched in AI, how high-level semantics can benefit the HRT paradigm is underexplored, often fuzzy, and intractable. We applied a semantics-based framework that could reveal different indicators of the environment (i.e. how much semantic information exists) in a mock-up disaster response mission. In such missions, semantics are crucial as the HRT should handle complex situations and respond quickly with correct decisions, where humans might have a high workload and stress. Especially when human operators need to shift their attention between robots and other tasks, they will struggle to build Situational Awareness (SA) quickly. The experiment suggests that the presented semantics: 1) alleviate the perceived workload of human operators; 2) increase the operator's trust in the SA; and 3) help to reduce the reaction time in switching the level of autonomy when needed. Additionally, we find that participants with higher trust in the system are encouraged by high-level semantics to use teleoperation mode more.