Deformable Cluster Manipulation via Whole-Arm Policy Learning
作者: Jayadeep Jacob, Wenzheng Zhang, Houston Warren, Paulo Borges, Tirthankar Bandyopadhyay, Fabio Ramos
分类: cs.RO, cs.LG
发布日期: 2025-07-22 (更新: 2025-12-22)
💡 一句话要点
提出基于整臂策略学习的形变物体集群操作方法,解决电力线清除等复杂任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion)
关键词: 形变物体操作 整臂策略学习 强化学习 触觉感知 电力线清除
📋 核心要点
- 现有方法在处理形变物体集群操作时,面临模型合成困难、感知不确定性高以及缺乏有效空间抽象等挑战。
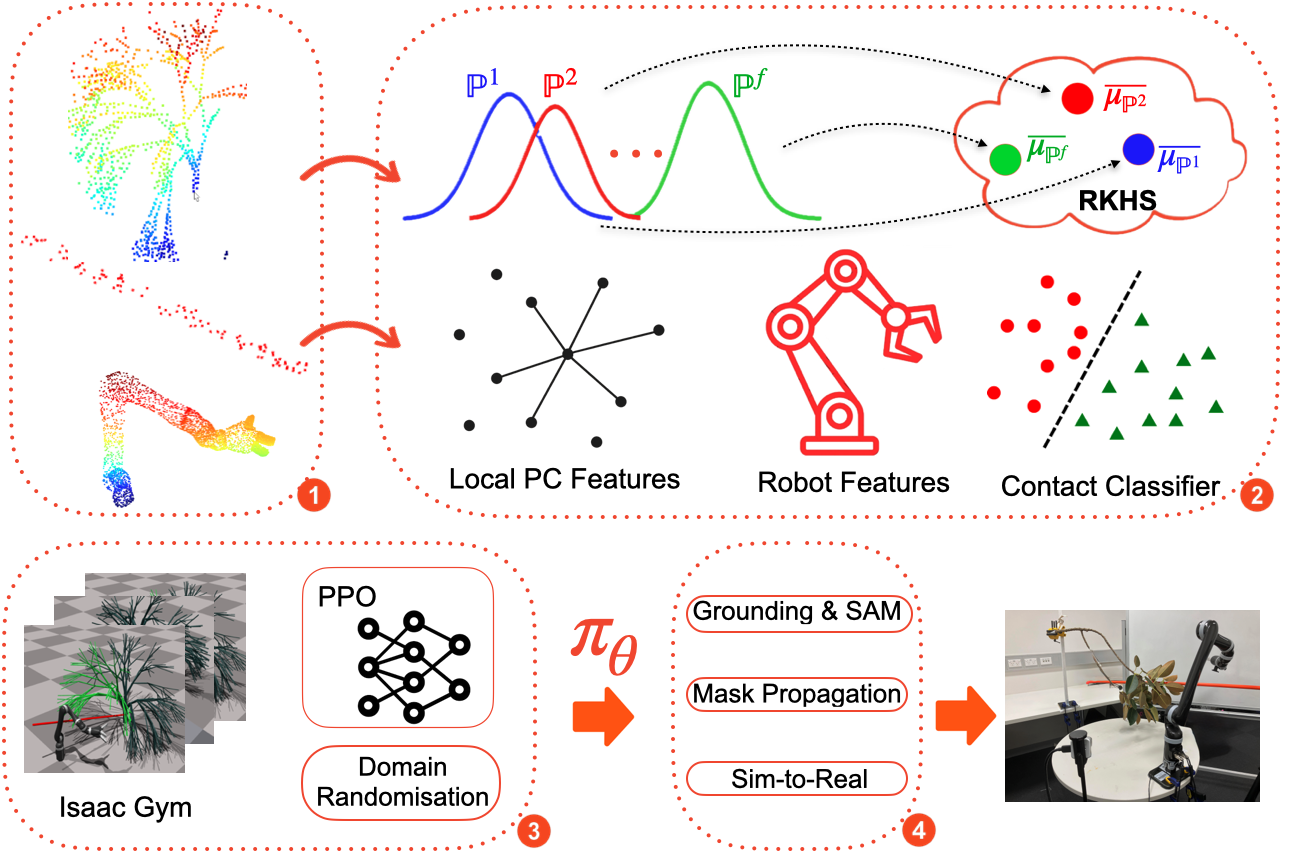
- 论文提出一种免模型强化学习框架,融合3D点云和触觉信息,利用整臂进行接触感知操作,并采用分布式状态表示和核均值嵌入提高训练效率。
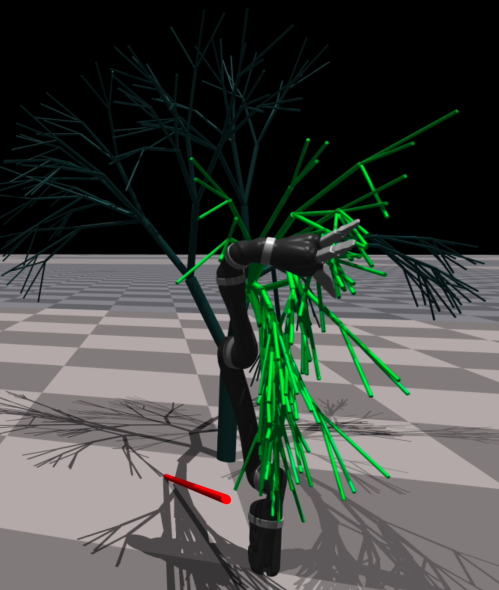
- 实验表明,该方法在电力线清除场景中能够生成创造性策略,并通过零样本sim-to-real迁移成功应用于真实环境。
📝 摘要(中文)
操纵形变物体的集群是一个具有广泛应用但极具挑战性的问题,它需要丰富的接触式整臂交互。潜在的解决方案必须解决现实模型合成能力有限、感知高度不确定以及缺乏有效的空间抽象等问题。我们提出了一种新颖的免模型策略学习框架,该框架集成了3D点云和本体触觉指示器两种模态,强调利用全身接触感知进行操作,超越了传统的末端执行器模式。我们的强化学习框架利用分布式的状态表示,并借助核均值嵌入,以提高训练效率和实时推理能力。此外,我们提出了一种新颖的与上下文无关的遮挡启发式方法,用于从目标区域清除形变物体以进行暴露任务。我们将该框架部署在电力线清除场景中,并观察到智能体产生了创造性的策略,利用多个手臂连杆进行去遮挡。最后,我们执行了零样本的sim-to-real策略迁移,使机械臂能够清除具有未知遮挡模式、未见拓扑结构和不确定动力学的真实树枝。
🔬 方法详解
问题定义:论文旨在解决形变物体集群的操作问题,例如电力线清除。现有方法在处理此类问题时,面临着几个关键痛点:一是难以建立精确的形变物体模型,二是感知存在高度不确定性,三是缺乏有效的空间抽象方法来指导操作。这些问题导致传统方法难以有效地操纵形变物体集群。
核心思路:论文的核心思路是采用免模型强化学习,直接从数据中学习操作策略,避免了对形变物体进行精确建模的需要。通过融合3D点云和触觉信息,智能体可以更好地感知环境和自身与物体的接触状态。此外,论文利用整臂进行操作,而不是仅仅依赖末端执行器,从而可以利用更多的自由度和接触点来完成任务。
技术框架:整体框架包括以下几个主要模块:1) 感知模块,负责从3D点云和触觉传感器获取环境和自身状态信息;2) 状态表示模块,采用分布式状态表示,并使用核均值嵌入来提高训练效率;3) 策略学习模块,使用强化学习算法训练整臂操作策略;4) 遮挡启发式模块,用于指导智能体清除目标区域的遮挡物。
关键创新:论文最重要的技术创新点在于融合了3D点云和触觉信息,并利用整臂进行操作。这种方法可以充分利用机械臂的自由度和接触点,从而更有效地操纵形变物体集群。此外,论文提出的分布式状态表示和核均值嵌入也提高了训练效率。与现有方法相比,该方法不需要对形变物体进行精确建模,并且可以更好地处理感知不确定性。
关键设计:论文中一些关键的设计包括:1) 使用分布式的状态表示,可以更好地捕捉状态的不确定性;2) 使用核均值嵌入来降低状态空间的维度,提高训练效率;3) 设计了一个与上下文无关的遮挡启发式方法,用于指导智能体清除遮挡物;4) 采用了一种奖励函数,鼓励智能体清除目标区域的遮挡物,并避免碰撞。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在电力线清除场景中能够生成创造性的策略,利用多个手臂连杆进行去遮挡。此外,通过零样本sim-to-real策略迁移,机械臂能够成功清除具有未知遮挡模式、未见拓扑结构和不确定动力学的真实树枝,验证了该方法的泛化能力。
🎯 应用场景
该研究成果可应用于电力线维护、农业采摘、医疗手术等领域。在电力线维护中,机械臂可以自动清除树枝等障碍物,提高电力线的安全性。在农业采摘中,机械臂可以轻柔地采摘水果,减少损伤。在医疗手术中,机械臂可以进行精细的操作,提高手术的精度和安全性。该研究的未来影响在于推动机器人技术在复杂环境下的应用,提高生产效率和安全性。
📄 摘要(原文)
Manipulating clusters of deformable objects presents a substantial challenge with widespread applicability, but requires contact-rich whole-arm interactions. A potential solution must address the limited capacity for realistic model synthesis, high uncertainty in perception, and the lack of efficient spatial abstractions, among others. We propose a novel framework for learning model-free policies integrating two modalities: 3D point clouds and proprioceptive touch indicators, emphasising manipulation with full body contact awareness, going beyond traditional end-effector modes. Our reinforcement learning framework leverages a distributional state representation, aided by kernel mean embeddings, to achieve improved training efficiency and real-time inference. Furthermore, we propose a novel context-agnostic occlusion heuristic to clear deformables from a target region for exposure tasks. We deploy the framework in a power line clearance scenario and observe that the agent generates creative strategies leveraging multiple arm links for de-occlusion. Finally, we perform zero-shot sim-to-real policy transfer, allowing the arm to clear real branches with unknown occlusion patterns, unseen topology, and uncertain dynamics. Website: https://sites.google.com/view/dcmwap/