Compositional Coordination for Multi-Robot Teams with Large Language Models
作者: Zhehui Huang, Guangyao Shi, Yuwei Wu, Vijay Kumar, Gaurav S. Sukhatme
分类: cs.RO, cs.AI, cs.LG, cs.MA
发布日期: 2025-07-21 (更新: 2025-10-22)
备注: IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS 2025) Oral
💡 一句话要点
LAN2CB:利用大语言模型实现多机器人团队的自然语言指令协调
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人协调 大语言模型 自然语言处理 行为树 代码生成
📋 核心要点
- 传统多机器人协调流程依赖专家手动转换自然语言指令,存在劳动密集、非专家难以使用和缺乏灵活性的问题。
- LAN2CB框架利用大语言模型,将自然语言任务描述转换为可执行的机器人控制代码,实现自动化协调。
- 实验结果表明,LAN2CB能够实现鲁棒和灵活的多机器人协调,显著减少手动工作,并支持任务泛化。
📝 摘要(中文)
多机器人协调传统上依赖于特定任务和专家驱动的流程,其中自然语言任务描述由领域专家手动转换为数学公式、算法设计和可执行代码。这种传统过程劳动密集、非专家难以使用,且对任务需求的变化缺乏灵活性。本文提出了LAN2CB(Language to Collective Behavior),这是一个新颖的框架,利用大型语言模型(LLMs)来简化和泛化多机器人协调流程。LAN2CB通过两个核心模块将自然语言(NL)任务描述转换为多机器人系统的可执行Python代码:(1)任务分析,将任务描述解析为行为树;(2)代码生成,利用行为树和结构化知识库生成机器人控制代码。此外,我们还引入了一个自然语言任务描述数据集,以支持开发和基准测试。在仿真和真实环境中的实验表明,LAN2CB能够从自然语言实现鲁棒和灵活的多机器人协调,显著减少手动工程工作,并支持跨多种任务类型的广泛泛化。
🔬 方法详解
问题定义:多机器人协调任务通常需要领域专家将自然语言描述的任务目标转化为机器人可以执行的数学公式、算法和代码。这个过程耗时耗力,且对任务的修改和调整非常不灵活。现有的方法难以让非专业人员快速部署和调整多机器人系统。
核心思路:LAN2CB的核心思路是利用大型语言模型(LLMs)的强大理解和生成能力,直接将自然语言的任务描述转化为可执行的机器人控制代码。通过将任务分解为行为树,并结合结构化的知识库,LLM可以生成符合任务要求的机器人行为。
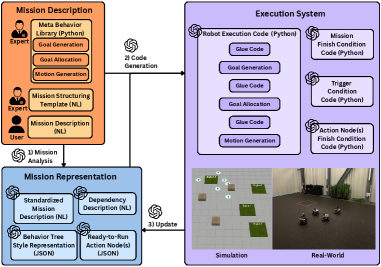
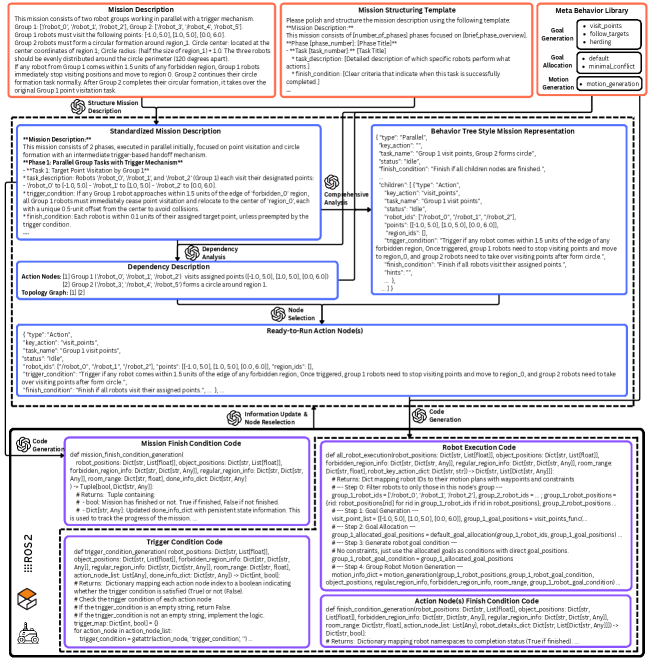
技术框架:LAN2CB框架包含两个主要模块:(1)任务分析模块:该模块使用LLM将自然语言的任务描述解析为行为树。行为树是一种图形化的表示方法,用于描述任务的层次结构和执行流程。(2)代码生成模块:该模块利用行为树和结构化的知识库,使用LLM生成机器人控制代码。知识库包含了机器人控制相关的函数、参数和规则。
关键创新:LAN2CB的关键创新在于利用LLM实现了从自然语言到机器人控制代码的直接转换,无需人工干预。这种方法极大地简化了多机器人协调的流程,降低了使用门槛,并提高了系统的灵活性和可扩展性。与传统方法相比,LAN2CB避免了手动设计算法和编写代码的繁琐过程。
关键设计:LAN2CB的关键设计包括:(1) 行为树的结构设计,需要合理地分解任务,并定义清晰的执行流程。(2) 知识库的构建,需要包含丰富的机器人控制相关的知识,并保证知识的准确性和完整性。(3) LLM的Prompt设计,需要设计合适的Prompt,引导LLM生成符合任务要求的行为树和代码。论文中可能还涉及一些超参数的调整,例如LLM的温度系数等,以控制生成结果的多样性和质量(具体细节未知)。
🖼️ 关键图片
📊 实验亮点
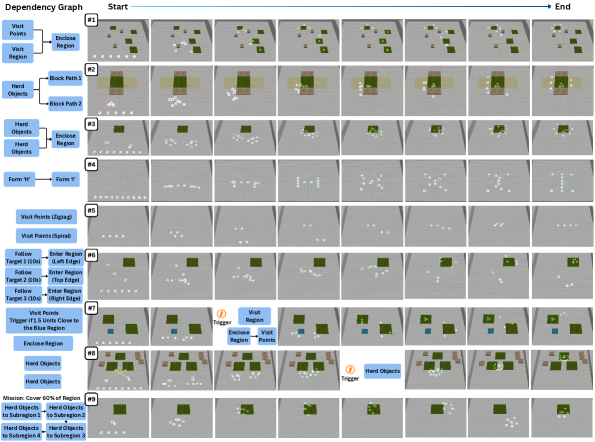
论文在仿真和真实环境中进行了实验验证,证明了LAN2CB的有效性。实验结果表明,LAN2CB能够从自然语言实现鲁棒和灵活的多机器人协调,显著减少手动工程工作,并支持跨多种任务类型的泛化。具体的性能数据和对比基线在论文中给出(具体数值未知)。
🎯 应用场景
LAN2CB具有广泛的应用前景,例如在仓库自动化、搜索救援、环境监测等领域,用户可以通过自然语言指令快速部署和调整多机器人系统,完成各种复杂的任务。该研究成果有望降低多机器人系统的使用门槛,促进多机器人技术在各个领域的应用,并加速人机协作的发展。
📄 摘要(原文)
Multi-robot coordination has traditionally relied on a mission-specific and expert-driven pipeline, where natural language mission descriptions are manually translated by domain experts into mathematical formulation, algorithm design, and executable code. This conventional process is labor-intensive, inaccessible to non-experts, and inflexible to changes in mission requirements. Here, we propose LAN2CB (Language to Collective Behavior), a novel framework that leverages large language models (LLMs) to streamline and generalize the multi-robot coordination pipeline. LAN2CB transforms natural language (NL) mission descriptions into executable Python code for multi-robot systems through two core modules: (1) Mission Analysis, which parses mission descriptions into behavior trees, and (2) Code Generation, which leverages the behavior tree and a structured knowledge base to generate robot control code. We further introduce a dataset of natural language mission descriptions to support development and benchmarking. Experiments in both simulation and real-world environments demonstrate that LAN2CB enables robust and flexible multi-robot coordination from natural language, significantly reducing manual engineering effort and supporting broad generalization across diverse mission types. Website: https://sites.google.com/view/lan-cb