DiffPF: Differentiable Particle Filtering with Generative Sampling via Conditional Diffusion Models
作者: Ziyu Wan, Lin Zhao
分类: cs.RO
发布日期: 2025-07-21 (更新: 2026-01-11)
💡 一句话要点
DiffPF:利用条件扩散模型进行生成式采样的可微粒子滤波,提升动态系统状态估计。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 可微粒子滤波 扩散模型 状态估计 动态系统 条件生成模型
📋 核心要点
- 传统可微粒子滤波依赖重要性权重和低容量提议分布,难以处理复杂、高维、多模态的滤波分布。
- DiffPF利用条件扩散模型学习灵活的后验采样器,通过预测粒子和当前观测来条件化扩散过程,实现高质量采样。
- 实验表明,DiffPF在模拟和真实世界任务中均优于现有滤波方法,尤其在多模态定位和视觉里程计任务中提升显著。
📝 摘要(中文)
本文提出了一种名为DiffPF的可微粒子滤波方法,它利用扩散模型进行动态系统中的状态估计。与传统的需要重要性权重且依赖于预定义或低容量提议分布的可微粒子滤波器不同,DiffPF通过将扩散模型条件作用于预测粒子和当前观测来学习灵活的后验采样器。这使得能够从复杂、高维和多模态的滤波分布中进行准确的、等权重的采样。我们在包括单模态和高度多模态分布在内的一系列场景中评估了DiffPF,并在模拟和真实世界的任务中对其进行了测试,结果表明它始终优于现有的滤波基线。特别是在高度多模态的全局定位基准测试中,DiffPF的估计精度提高了82.8%,在真实的KITTI视觉里程计基准测试中,与最先进的可微滤波器相比,提高了26%。据我们所知,DiffPF是第一个将条件扩散模型集成到粒子滤波中的方法,从而实现了高质量的后验采样,产生更具信息量的粒子,并显著提高了状态估计。
🔬 方法详解
问题定义:论文旨在解决动态系统中状态估计的问题,尤其是在状态空间复杂、高维且呈现多模态分布的情况下。传统的可微粒子滤波方法通常依赖于重要性采样,这需要一个良好的提议分布来近似真实的后验分布。然而,设计一个能够有效处理复杂后验分布的提议分布非常困难,现有的方法要么使用预定义的简单分布,要么使用容量有限的模型来学习提议分布,导致采样效率低下和估计精度不高。
核心思路:DiffPF的核心思路是利用条件扩散模型来学习一个灵活的后验采样器。扩散模型能够生成高质量的样本,并且可以通过条件作用来控制生成过程。DiffPF将预测的粒子和当前的观测作为条件输入到扩散模型中,从而引导扩散模型生成符合后验分布的样本。这种方法避免了手动设计提议分布的困难,并且能够处理复杂、高维和多模态的后验分布。
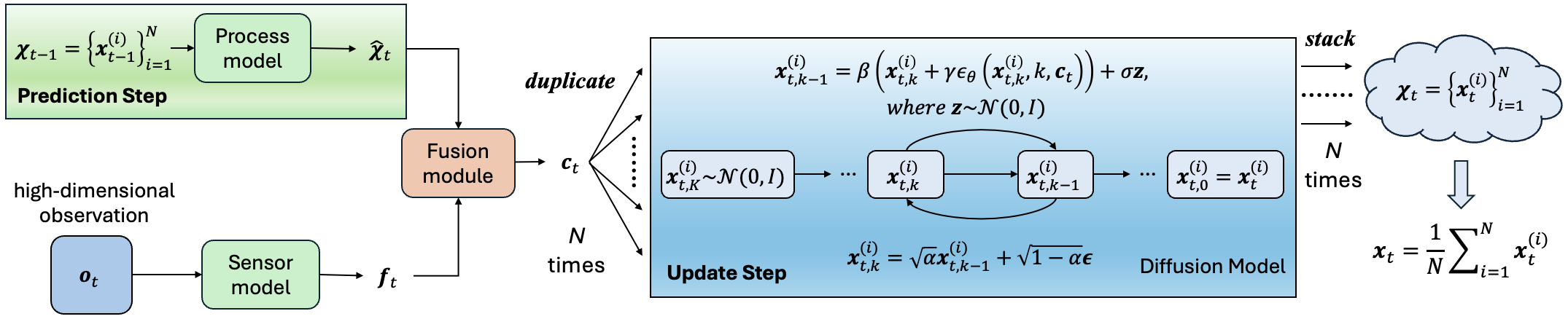
技术框架:DiffPF的整体框架包括以下几个主要步骤:1) 预测步骤:使用状态转移模型预测下一时刻的粒子状态。2) 观测步骤:根据观测模型计算每个粒子的观测似然。3) 重采样步骤:利用条件扩散模型,以预测的粒子和当前观测为条件,生成新的粒子集合。这些新粒子近似于真实的后验分布,并且具有相等的权重。4) 状态估计:根据重采样后的粒子集合计算状态的估计值。
关键创新:DiffPF最重要的技术创新点是将条件扩散模型集成到粒子滤波框架中。与传统的粒子滤波方法相比,DiffPF不需要手动设计提议分布,而是通过学习的方式获得一个能够生成高质量后验样本的采样器。这使得DiffPF能够处理更加复杂的动态系统,并且能够获得更高的状态估计精度。
关键设计:DiffPF的关键设计包括:1) 条件扩散模型的选择:论文中使用了基于去噪扩散概率模型(DDPM)的条件扩散模型。2) 条件作用的方式:论文中将预测的粒子和当前观测通过拼接的方式作为扩散模型的输入。3) 损失函数的设计:论文使用了标准的扩散模型训练损失函数,即最小化预测噪声与真实噪声之间的差异。4) 粒子数量的选择:粒子数量的选择会影响状态估计的精度和计算复杂度,需要在实际应用中进行权衡。
🖼️ 关键图片

📊 实验亮点
DiffPF在多个基准测试中取得了显著的性能提升。在高度多模态的全局定位基准测试中,DiffPF的估计精度提高了82.8%。在真实的KITTI视觉里程计基准测试中,与最先进的可微滤波器相比,DiffPF的估计精度提高了26%。这些结果表明,DiffPF能够有效地处理复杂的状态估计问题,并且具有很强的实际应用价值。
🎯 应用场景
DiffPF具有广泛的应用前景,例如机器人定位与导航、目标跟踪、传感器融合、以及金融时间序列预测等领域。其能够有效处理复杂环境下的状态估计问题,提高系统的鲁棒性和准确性。未来,DiffPF可以进一步扩展到处理更复杂的动态系统,例如具有非线性动力学和非高斯噪声的系统,并可以与其他深度学习技术相结合,例如强化学习,以实现更智能的控制和决策。
📄 摘要(原文)
This paper proposes DiffPF, a differentiable particle filter that leverages diffusion models for state estimation in dynamic systems. Unlike conventional differentiable particle filters, which require importance weighting and typically rely on predefined or low-capacity proposal distributions. DiffPF learns a flexible posterior sampler by conditioning a diffusion model on predicted particles and the current observation. This enables accurate, equally-weighted sampling from complex, high-dimensional, and multimodal filtering distributions. We evaluate DiffPF across a range of scenarios, including both unimodal and highly multimodal distributions, and test it on simulated as well as real-world tasks, where it consistently outperforms existing filtering baselines. In particular, DiffPF achieves an 82.8% improvement in estimation accuracy on a highly multimodal global localization benchmark, and a 26% improvement on the real-world KITTI visual odometry benchmark, compared to state-of-the-art differentiable filters. To the best of our knowledge, DiffPF is the first method to integrate conditional diffusion models into particle filtering, enabling high-quality posterior sampling that produces more informative particles and significantly improves state estimation.