Koopman Operator Based Time-Delay Embeddings and State History Augmented LQR for Periodic Hybrid Systems: Bouncing Pendulum and Bipedal Walking
作者: Chun-Ming Yang, Pranav A. Bhounsule
分类: cs.RO
发布日期: 2025-07-19 (更新: 2025-08-11)
🔗 代码/项目: GITHUB
💡 一句话要点
基于Koopman算子的时延嵌入与状态历史增强LQR用于周期混合系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: Koopman算子 时延嵌入 线性二次调节器 周期混合系统 机器人控制
📋 核心要点
- 传统方法难以对非光滑或混合系统进行精确建模和控制,尤其是在周期性运动中。
- 利用Koopman算子和时延嵌入,将非线性系统近似为线性系统,从而简化控制器的设计。
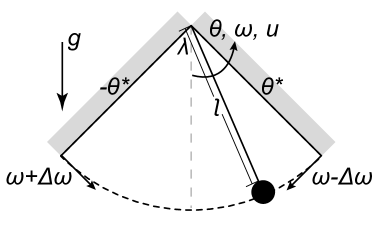
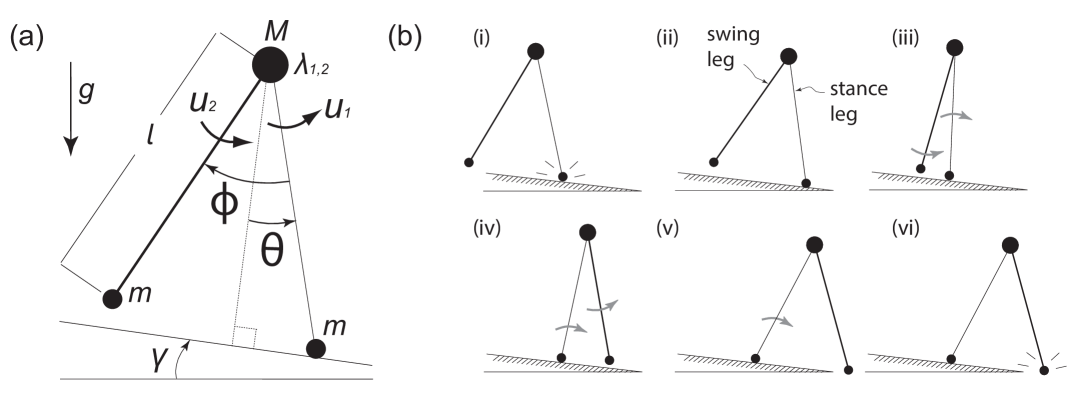
- 通过摆动摆和最简步行者的实验验证,证明了该方法在周期性混合系统控制中的有效性。
📝 摘要(中文)
本文提出了一种利用时延嵌入技术为周期性非光滑或混合系统构建线性状态空间模型的方法。该方法通过使用系统状态历史快照,即使在模式和时间安排上具有一致性的前提下,也能将此类系统建模为线性系统。我们将时延嵌入扩展到两个周期性混合系统:摆动摆和带有控制输入的最简单步行者,从而生成线性模型。由此产生了一种状态历史增强线性二次调节器(LQR),它使用当前和过去的状态历史进行反馈控制。示例代码可在https://github.com/Chun-MingYang/koopman-timeDelay-lqr.git找到。
🔬 方法详解
问题定义:论文旨在解决周期性混合系统(如摆动摆和双足步行)的建模和控制问题。传统的控制方法,如直接应用线性控制理论,往往难以处理这些系统的非线性、非光滑特性以及模式切换带来的复杂性。现有方法在处理此类系统时,可能需要复杂的非线性模型或难以保证稳定性和鲁棒性。
核心思路:论文的核心思路是利用Koopman算子理论和时延嵌入技术,将非线性周期性混合系统近似为一个线性系统。Koopman算子可以将非线性动力学映射到一个高维线性空间中,而时延嵌入则利用系统过去的状态信息来构建这个线性空间。通过这种方式,可以将复杂的非线性控制问题转化为一个线性控制问题,从而可以使用线性控制理论进行设计。
技术框架:整体框架包括以下几个主要步骤:1) 数据采集:通过对周期性混合系统进行仿真或实验,采集系统状态随时间变化的数据。2) 时延嵌入:利用采集到的状态数据,构建时延嵌入矩阵,该矩阵包含了系统在不同时刻的状态历史信息。3) Koopman算子近似:利用时延嵌入矩阵,近似Koopman算子,得到一个线性状态空间模型。4) LQR控制器设计:基于线性状态空间模型,设计状态历史增强的LQR控制器,该控制器利用当前和过去的状态信息进行反馈控制。
关键创新:该论文的关键创新在于将Koopman算子理论和时延嵌入技术应用于周期性混合系统的建模和控制。与传统的控制方法相比,该方法不需要显式地建立系统的非线性模型,而是通过数据驱动的方式学习系统的动力学特性。此外,状态历史增强的LQR控制器能够利用更多的系统信息,从而提高控制性能和鲁棒性。
关键设计:时延嵌入的窗口大小是一个关键参数,它决定了控制器能够利用的系统历史信息的长度。窗口太小可能无法捕捉到系统的完整动力学特性,而窗口太大则可能增加计算复杂度。LQR控制器的Q和R矩阵需要根据具体的系统特性进行调整,以达到期望的控制性能。此外,论文中使用的Koopman算子近似方法也需要仔细选择,以保证模型的精度和稳定性。
🖼️ 关键图片
📊 实验亮点
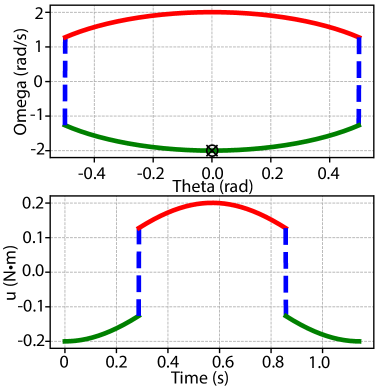
论文通过摆动摆和最简步行者的仿真实验验证了该方法的有效性。实验结果表明,基于Koopman算子的时延嵌入和状态历史增强LQR能够有效地控制这些周期性混合系统,并实现稳定的周期性运动。虽然论文中没有给出具体的性能数据,但开源代码为进一步的实验和性能评估提供了基础。
🎯 应用场景
该研究成果可应用于机器人控制、步态生成、运动规划等领域。例如,可以用于设计更稳定、更高效的双足机器人控制器,或者用于优化假肢的运动模式。此外,该方法还可以推广到其他周期性混合系统的控制问题,如电力系统、生物系统等,具有广泛的应用前景。
📄 摘要(原文)
Time-delay embedding is a technique that uses snapshots of state history over time to build a linear state space model of a nonlinear smooth system. We demonstrate that periodic non-smooth or hybrid system can also be modeled as a linear state space system using this approach as long as its behavior is consistent in modes and timings. We extend time-delay embeddings to generate a linear model of two periodic hybrid systems: the bouncing pendulum and the simplest walker with control inputs. This leads to a state history augmented linear quadratic regulator (LQR) which uses current and past state history for feedback control. Example code can be found at https://github.com/Chun-MingYang/koopman-timeDelay-lqr.git