Conformal Contraction for Robust Nonlinear Control with Distribution-Free Uncertainty Quantification
作者: Sihang Wei, Melkior Ornik, Hiroyasu Tsukamoto
分类: math.OC, cs.RO, eess.SY
发布日期: 2025-07-18
备注: IEEE CDC 2025 submission (accepted)
💡 一句话要点
提出基于共形收缩的鲁棒非线性控制框架,实现无分布假设的不确定性量化。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 鲁棒控制 非线性系统 不确定性量化 共形预测 控制不变集
📋 核心要点
- 传统鲁棒控制方法通常对不确定性进行结构性假设,限制了其在复杂非线性系统中的应用。
- 该论文提出一种基于共形预测的鲁棒控制框架,无需对不确定性模型进行假设,实现数据驱动的不确定性量化。
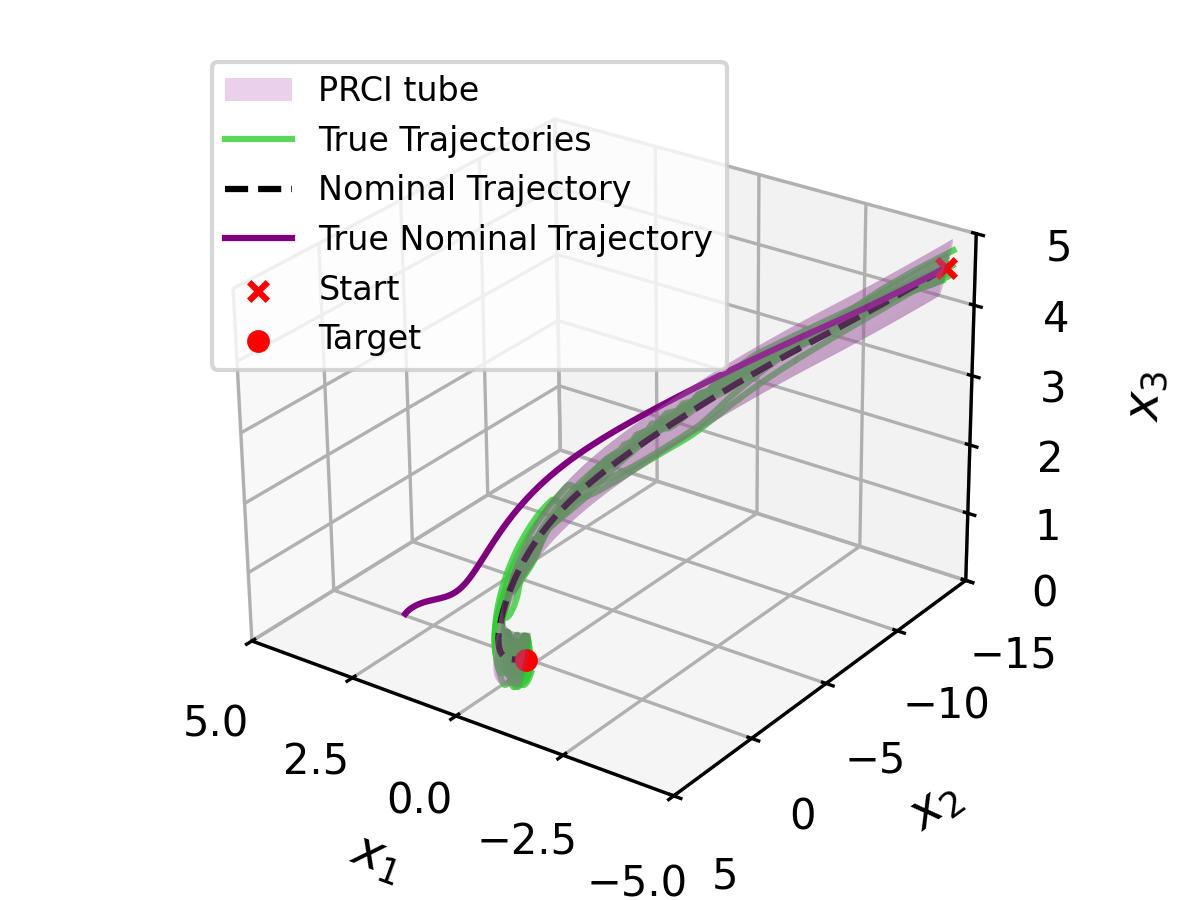
- 数值实验验证了该框架的有效性,并展示了概率鲁棒控制不变(PRCI)管在运动规划中的性能。
📝 摘要(中文)
本文提出了一种新颖的鲁棒控制框架,用于处理连续时间、受扰动的非线性动力系统,其不确定性与状态和控制输入均呈非线性关系。与对不确定性施加结构性假设的传统方法不同,我们的框架通过数据驱动的不确定性预测来增强基于收缩的鲁棒控制,且不依赖于不确定性和预测器的模型。我们通过共形预测,从统计学角度量化了在具有不确定性的动力学下,收缩条件被满足的可靠程度,从而为轨迹跟踪误差的指数有界性提供了无分布且有限时间的概率保证。我们进一步提出了概率鲁棒控制不变(PRCI)管,用于分布鲁棒的运动规划,在该管内,受扰动系统的轨迹保证以有限的概率保持在其中,而无需明确了解不确定性模型。数值模拟验证了所提出的鲁棒控制框架的有效性和PRCI管的性能。
🔬 方法详解
问题定义:论文旨在解决连续时间非线性动力系统在存在不确定性扰动下的鲁棒控制问题。传统方法通常需要对不确定性进行建模,例如假设其满足某种分布或具有某种结构,这在实际应用中往往难以满足。因此,如何在不依赖不确定性模型的情况下,实现对非线性系统的鲁棒控制是一个挑战。
核心思路:论文的核心思路是利用共形预测(Conformal Prediction)来量化不确定性,并将其融入到基于收缩理论的鲁棒控制框架中。共形预测是一种无分布的预测方法,可以提供具有概率保证的预测区间,而无需对数据的分布做出任何假设。通过共形预测,可以估计出系统状态在未来时刻可能存在的范围,从而设计鲁棒控制器,保证系统轨迹的安全性。
技术框架:该框架主要包含以下几个模块:1) 数据采集模块:收集系统运行的历史数据;2) 不确定性预测模块:利用历史数据,通过机器学习方法(如神经网络)预测系统的不确定性;3) 共形预测模块:利用共形预测方法,对不确定性预测结果进行量化,得到具有概率保证的预测区间;4) 鲁棒控制设计模块:基于收缩理论,设计鲁棒控制器,保证系统轨迹在预测区间内;5) 概率鲁棒控制不变(PRCI)管构建模块:利用共形预测结果,构建PRCI管,保证系统轨迹以一定的概率保持在管内。
关键创新:该论文的关键创新在于将共形预测与基于收缩理论的鲁棒控制相结合,提出了一种无分布的鲁棒控制框架。与传统方法相比,该框架无需对不确定性模型进行假设,具有更强的适应性和鲁棒性。此外,论文还提出了PRCI管的概念,为分布鲁棒的运动规划提供了新的思路。
关键设计:在不确定性预测模块中,可以使用各种机器学习模型,如神经网络、支持向量机等。共形预测模块的关键在于选择合适的置信水平,以保证预测区间的概率覆盖率。鲁棒控制器的设计需要根据具体的系统动力学特性进行调整,常用的方法包括滑模控制、模型预测控制等。PRCI管的构建需要根据共形预测的结果,计算出系统状态可能存在的范围,并将其作为管的边界。
🖼️ 关键图片


📊 实验亮点
数值模拟结果表明,该论文提出的鲁棒控制框架能够有效地抑制不确定性扰动,保证系统轨迹的指数有界性。PRCI管能够以较高的概率包含系统轨迹,验证了其在分布鲁棒运动规划中的有效性。具体性能数据未知,但论文强调了该方法在无模型假设下的有效性。
🎯 应用场景
该研究成果可应用于各种需要高可靠性和安全性的控制系统,例如自动驾驶、机器人导航、航空航天等领域。在这些领域中,系统面临着各种不确定性因素,如传感器噪声、环境变化等。利用该论文提出的方法,可以有效地提高系统的鲁棒性和安全性,保证系统在不确定性环境下的稳定运行。
📄 摘要(原文)
We present a novel robust control framework for continuous-time, perturbed nonlinear dynamical systems with uncertainty that depends nonlinearly on both the state and control inputs. Unlike conventional approaches that impose structural assumptions on the uncertainty, our framework enhances contraction-based robust control with data-driven uncertainty prediction, remaining agnostic to the models of the uncertainty and predictor. We statistically quantify how reliably the contraction conditions are satisfied under dynamics with uncertainty via conformal prediction, thereby obtaining a distribution-free and finite-time probabilistic guarantee for exponential boundedness of the trajectory tracking error. We further propose the probabilistically robust control invariant (PRCI) tube for distributionally robust motion planning, within which the perturbed system trajectories are guaranteed to stay with a finite probability, without explicit knowledge of the uncertainty model. Numerical simulations validate the effectiveness of the proposed robust control framework and the performance of the PRCI tube.