LiDAR, GNSS and IMU Sensor Alignment through Dynamic Time Warping to Construct 3D City Maps
作者: Haitian Wang, Hezam Albaqami, Xinyu Wang, Muhammad Ibrahim, Zainy M. Malakan, Abdullah M. Algamdi, Mohammed H. Alghamdi, Ajmal Mian
分类: cs.RO
发布日期: 2025-07-11 (更新: 2025-10-23)
💡 一句话要点
提出基于动态时间规整的LiDAR-GNSS-IMU融合框架,用于构建高精度三维城市地图。
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 三维地图构建 LiDAR GNSS IMU 动态时间规整 扩展卡尔曼滤波 城市建模
📋 核心要点
- 现有基于LiDAR的三维地图构建方法易受累积漂移影响,导致全局对齐误差,尤其是在GNSS约束环境下。
- 提出一种融合LiDAR、GNSS和IMU数据的统一框架,利用动态时间规整进行时间对齐,并使用扩展卡尔曼滤波优化传感器数据。
- 实验结果表明,该方法显著降低了全局对齐误差和交叉路口中心偏移,提升了地图构建的几何一致性。
📝 摘要(中文)
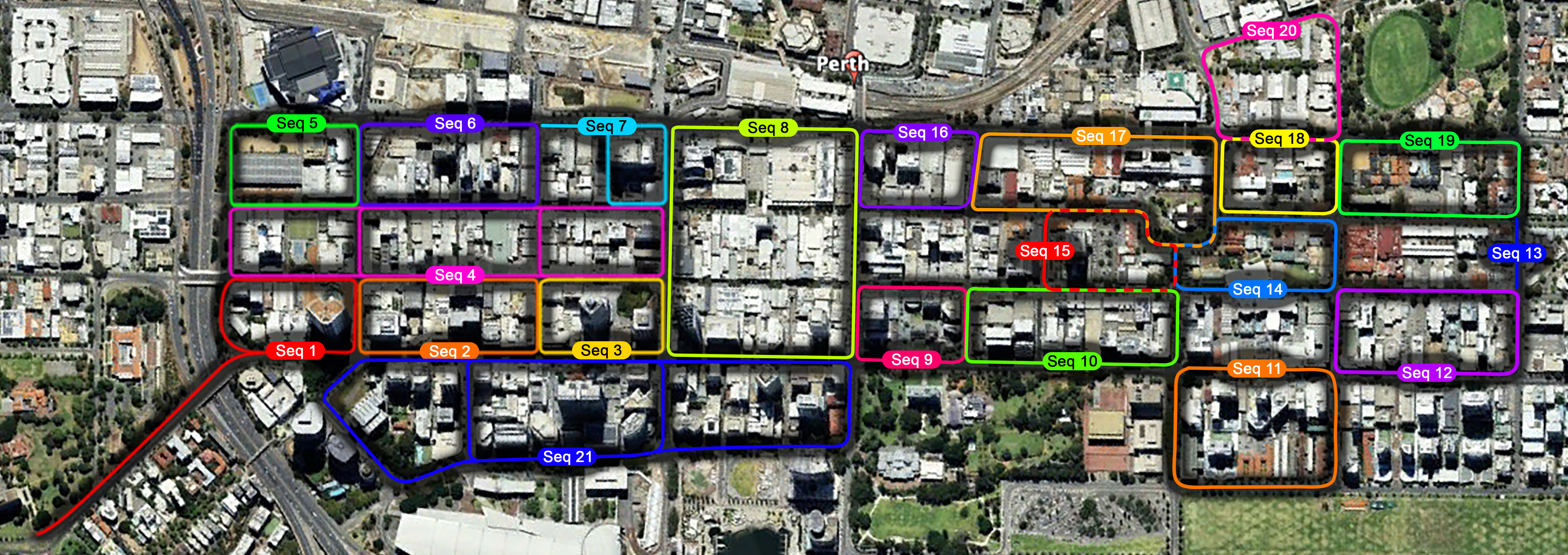
本文提出了一种融合LiDAR、GNSS和IMU数据的高分辨率城市级三维地图构建统一框架,旨在解决基于LiDAR的三维地图构建中累积漂移导致全局错位的问题,尤其是在GNSS约束环境中。该方法利用动态时间规整执行基于速度的时间对齐,并通过扩展卡尔曼滤波优化GNSS和IMU信号。局部地图通过基于正态分布变换的配准和带有闭环检测的姿态图优化构建,而全局一致性则通过GNSS约束的锚点以及重叠部分的精细配准来保证。此外,本文还发布了一个在西澳大利亚珀斯采集的大规模多模态数据集,包含144,000帧数据,由128线Ouster LiDAR、同步RTK-GNSS轨迹和MEMS-IMU测量组成,覆盖21个城市环线。实验结果表明,该框架将平均全局对齐误差从3.32米降低到1.24米,提升了61.4%,并将交叉路口中心偏移从13.22米显著降低到2.01米,提升了84.8%。构建的高保真地图已公开。
🔬 方法详解
问题定义:论文旨在解决城市尺度三维地图构建中,由于传感器噪声和累积漂移导致的全局对齐误差问题。现有方法在GNSS约束环境下,仍然难以保证地图的全局一致性和局部精度,尤其是在长时间、大范围的数据采集过程中,漂移问题更加突出。
核心思路:论文的核心思路是利用动态时间规整(DTW)进行时间同步,并结合扩展卡尔曼滤波(EKF)优化GNSS和IMU数据,从而提高传感器数据的精度和一致性。通过精确的时间同步和数据融合,可以有效减少累积漂移,提高地图的全局一致性。同时,利用GNSS作为全局约束,进一步校正地图的漂移。
技术框架:整体框架包括以下几个主要阶段:1) 基于速度的动态时间规整,用于LiDAR、GNSS和IMU数据的时间对齐;2) 使用扩展卡尔曼滤波对GNSS和IMU数据进行优化;3) 基于正态分布变换(NDT)的局部地图构建和姿态图优化,包含闭环检测;4) 基于GNSS约束的全局一致性优化,包括GNSS锚点约束和重叠区域的精细配准。
关键创新:论文的关键创新在于将动态时间规整应用于LiDAR、GNSS和IMU数据的时间同步,并结合扩展卡尔曼滤波进行数据优化。与传统的时间同步方法相比,DTW能够更好地处理传感器数据中的时间偏差和非线性变化。此外,结合GNSS约束进行全局优化,进一步提高了地图的全局一致性。
关键设计:动态时间规整使用速度信息作为对齐的依据,通过最小化速度差异来确定最佳的时间对应关系。扩展卡尔曼滤波用于融合GNSS和IMU数据,估计车辆的姿态和速度,并对传感器噪声进行建模。姿态图优化使用g2o等优化库,通过最小化重投影误差和闭环约束来优化局部地图。GNSS约束通过将GNSS位置作为固定锚点,约束姿态图的全局漂移。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法能够显著降低三维城市地图的全局对齐误差和交叉路口中心偏移。具体而言,平均全局对齐误差从3.32米降低到1.24米,提升了61.4%,交叉路口中心偏移从13.22米降低到2.01米,提升了84.8%。这些数据表明,该方法在提高地图的几何一致性方面具有显著优势。
🎯 应用场景
该研究成果可应用于自动驾驶、城市规划、智能交通、增强现实等领域。高精度三维城市地图是自动驾驶车辆感知环境、进行定位和导航的关键。该方法构建的地图具有较高的全局一致性和局部精度,能够为自动驾驶车辆提供可靠的环境信息。此外,该地图还可以用于城市规划和智能交通管理,例如交通流量分析、基础设施维护等。
📄 摘要(原文)
LiDAR-based 3D mapping suffers from cumulative drift causing global misalignment, particularly in GNSS-constrained environments. To address this, we propose a unified framework that fuses LiDAR, GNSS, and IMU data for high-resolution city-scale mapping. The method performs velocity-based temporal alignment using Dynamic Time Warping and refines GNSS and IMU signals via extended Kalman filtering. Local maps are built using Normal Distributions Transform-based registration and pose graph optimization with loop closure detection, while global consistency is enforced using GNSS-constrained anchors followed by fine registration of overlapping segments. We also introduce a large-scale multimodal dataset captured in Perth, Western Australia to facilitate future research in this direction. Our dataset comprises 144,000 frames acquired with a 128-channel Ouster LiDAR, synchronized RTK-GNSS trajectories, and MEMS-IMU measurements across 21 urban loops. To assess geometric consistency, we evaluated our method using alignment metrics based on road centerlines and intersections to capture both global and local accuracy. The proposed framework reduces the average global alignment error from 3.32m to 1.24m, achieving a 61.4% improvement, and significantly decreases the intersection centroid offset from 13.22m to 2.01m, corresponding to an 84.8% enhancement. The constructed high-fidelity map is publicly available through https://ieee-dataport.org/documents/perth-cbd-high-resolution-lidar-map-gnss-and-imu-calibration and its visualization can be viewed in the provided in https://www.youtube.com/watch?v=-ZUgs1KyMks. This dataset and method together establish a new benchmark for evaluating 3D city mapping in GNSS-constrained environments.