Friction Estimation for In-Hand Planar Motion
作者: Gabriel Arslan Waltersson, Yiannis Karayiannidis
分类: cs.RO
发布日期: 2025-07-09
💡 一句话要点
提出一种在线估计手内平面滑动摩擦参数的方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 手内操作 摩擦估计 触觉感知 滑动操作 参数估计
📋 核心要点
- 现有的手内操作摩擦参数估计方法难以适应快速变化的滑-粘动态,影响估计精度。
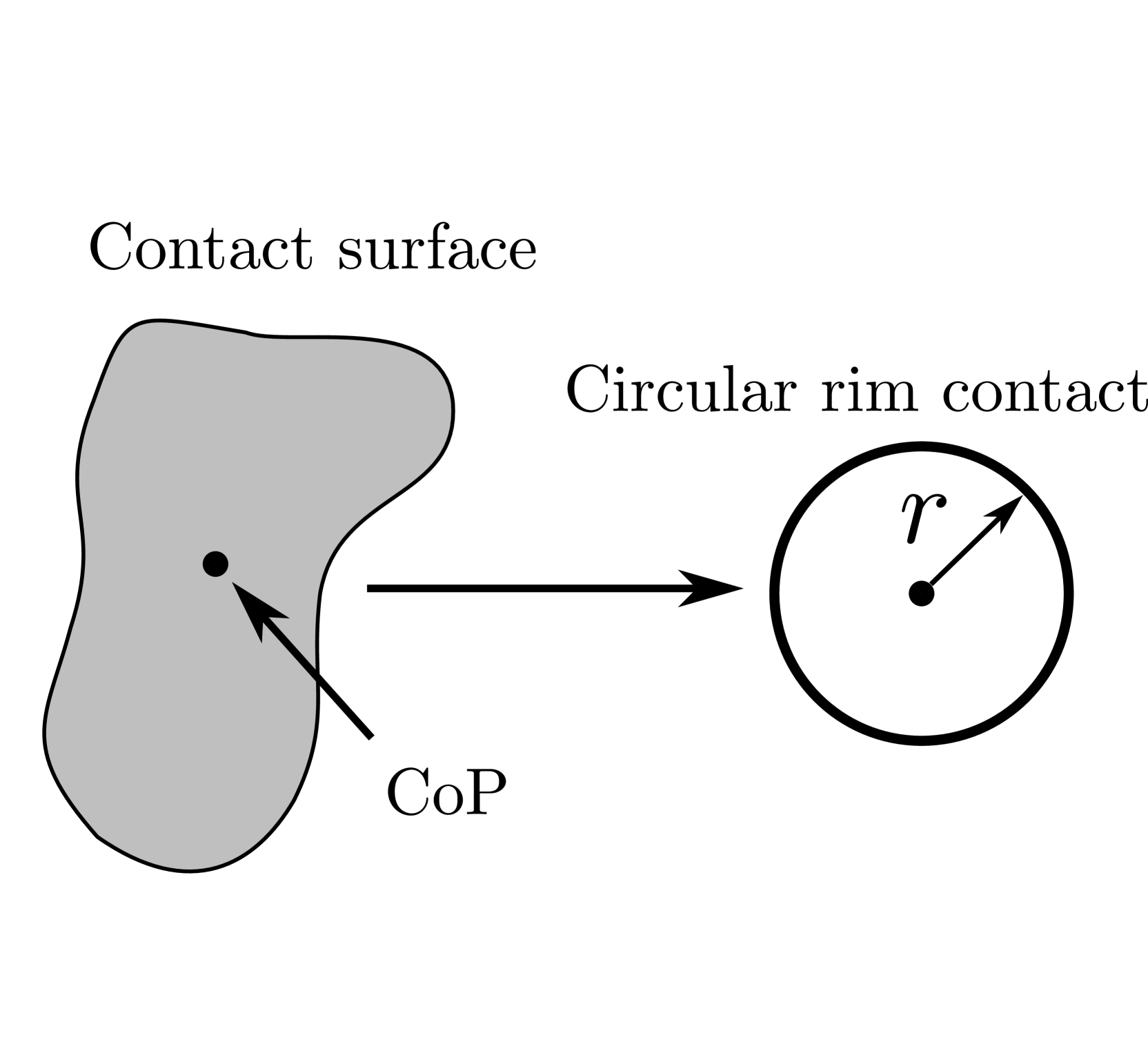
- 该方法利用触觉信息,在线估计静态摩擦、库仑摩擦和接触半径等关键参数,提升了估计的实时性和准确性。
- 通过仿真和真实实验验证了该方法的有效性,并提出启发式策略处理滑-粘动态问题。
📝 摘要(中文)
本文提出了一种在线估计平行夹爪手内滑动操作过程中接触属性的方法。我们从接触力和滑动速度的触觉测量中估计静态摩擦、库仑摩擦以及接触半径。该方法在仿真和真实世界的实验中都得到了验证。此外,我们提出了一种启发式方法来处理快速的滑-粘动态,这种动态可能会对估计产生不利影响。
🔬 方法详解
问题定义:论文旨在解决手内平面滑动操作中,准确且实时地估计接触属性(包括静态摩擦、库仑摩擦和接触半径)的问题。现有方法在处理快速滑-粘动态时表现不佳,导致估计精度下降,难以满足实际应用需求。
核心思路:论文的核心思路是利用触觉传感器获取的接触力和滑动速度信息,建立摩擦模型,并通过在线估计方法实时更新模型参数。通过分析接触力和速度之间的关系,推断出摩擦系数和接触半径等关键参数。这种方法能够适应操作过程中接触状态的变化,提高估计的准确性和鲁棒性。
技术框架:该方法主要包含以下几个阶段:1) 数据采集:利用触觉传感器获取接触力和滑动速度数据;2) 摩擦模型建立:建立基于库仑摩擦定律的摩擦模型,将接触力和速度与摩擦参数联系起来;3) 参数估计:使用在线估计方法(具体方法未知)根据采集的数据实时更新摩擦模型参数;4) 滑-粘动态处理:采用启发式策略检测并处理快速滑-粘动态,以避免其对参数估计产生不利影响。
关键创新:该论文的关键创新在于提出了一种能够在线估计手内滑动操作中接触属性的方法,并针对快速滑-粘动态提出了启发式处理策略。与离线估计方法相比,该方法能够实时适应接触状态的变化,提高估计的准确性和鲁棒性。
关键设计:论文中提到使用启发式方法处理滑-粘动态,但具体实现细节未知。在线估计方法的具体选择(如卡尔曼滤波、递归最小二乘等)以及摩擦模型的具体形式(如考虑速度相关的摩擦模型)也属于关键设计,但论文摘要中未明确说明。
🖼️ 关键图片


📊 实验亮点
该方法在仿真和真实世界的实验中都得到了验证,证明了其有效性。虽然摘要中没有给出具体的性能数据,但提到该方法能够处理快速的滑-粘动态,这表明其在复杂操作场景下具有一定的鲁棒性。启发式策略的提出是解决实际问题的重要一步。
🎯 应用场景
该研究成果可应用于机器人灵巧手操作、自动化装配、以及其他需要精确控制接触力的场景。通过准确估计摩擦参数,机器人可以更好地执行抓取、滑动、旋转等操作,提高操作的稳定性和成功率。此外,该方法还可以用于评估物体表面的摩擦特性,为材料选择和表面处理提供参考。
📄 摘要(原文)
This paper presents a method for online estimation of contact properties during in-hand sliding manipulation with a parallel gripper. We estimate the static and Coulomb friction as well as the contact radius from tactile measurements of contact forces and sliding velocities. The method is validated in both simulation and real-world experiments. Furthermore, we propose a heuristic to deal with fast slip-stick dynamics which can adversely affect the estimation.