Evaluation of Habitat Robotics using Large Language Models
作者: William Li, Lei Hamilton, Kaise Al-natour, Sanjeev Mohindra
分类: cs.RO, cs.CL
发布日期: 2025-07-08
备注: 6 pages, IEEE HPEC submission
💡 一句话要点
利用大型语言模型评估Habitat机器人解决具身任务的有效性
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身机器人 大型语言模型 协同任务 推理能力 Meta PARTNER
📋 核心要点
- 现有方法在复杂具身机器人任务中面临推理能力不足的挑战,难以有效协同完成任务。
- 论文核心在于探索大型语言模型的推理能力,并将其应用于具身机器人任务的解决,特别是协同任务。
- 实验结果表明,具备推理能力的模型(如o3-mini)在Meta PARTNER环境中显著优于非推理模型,验证了方法的有效性。
📝 摘要(中文)
本文评估了大型语言模型在解决具身机器人任务中的有效性,使用了Meta PARTNER基准。Meta PARTNER在随机室内厨房场景中提供简化的环境和机器人交互。每个随机厨房场景都包含一个任务,其中两个机器人智能体协同工作以解决该任务。我们评估了多个前沿模型在Meta PARTNER环境中的表现。结果表明,在PARTNER的机器人具身环境中,像OpenAI o3-mini这样的推理模型优于像OpenAI GPT-4o和Llama 3这样的非推理模型。o3-mini在集中式、分散式、完全可观察和部分可观察配置中均表现出优异性能。这为具身机器人开发提供了一个有希望的研究方向。
🔬 方法详解
问题定义:论文旨在解决具身机器人协同任务中,现有方法推理能力不足的问题。现有方法通常难以在复杂环境中进行有效的推理和决策,导致协同效率低下,任务完成质量不高。Meta PARTNER基准提供了一个标准化的评估平台,但如何充分利用大型语言模型的推理能力来提升机器人协同性能仍然是一个挑战。
核心思路:论文的核心思路是利用大型语言模型的强大推理能力,指导机器人智能体在具身环境中进行决策和行动。通过将任务分解为子任务,并利用语言模型进行推理和规划,从而实现更高效、更智能的机器人协同。这种方法旨在弥补传统方法在复杂环境下的推理缺陷。
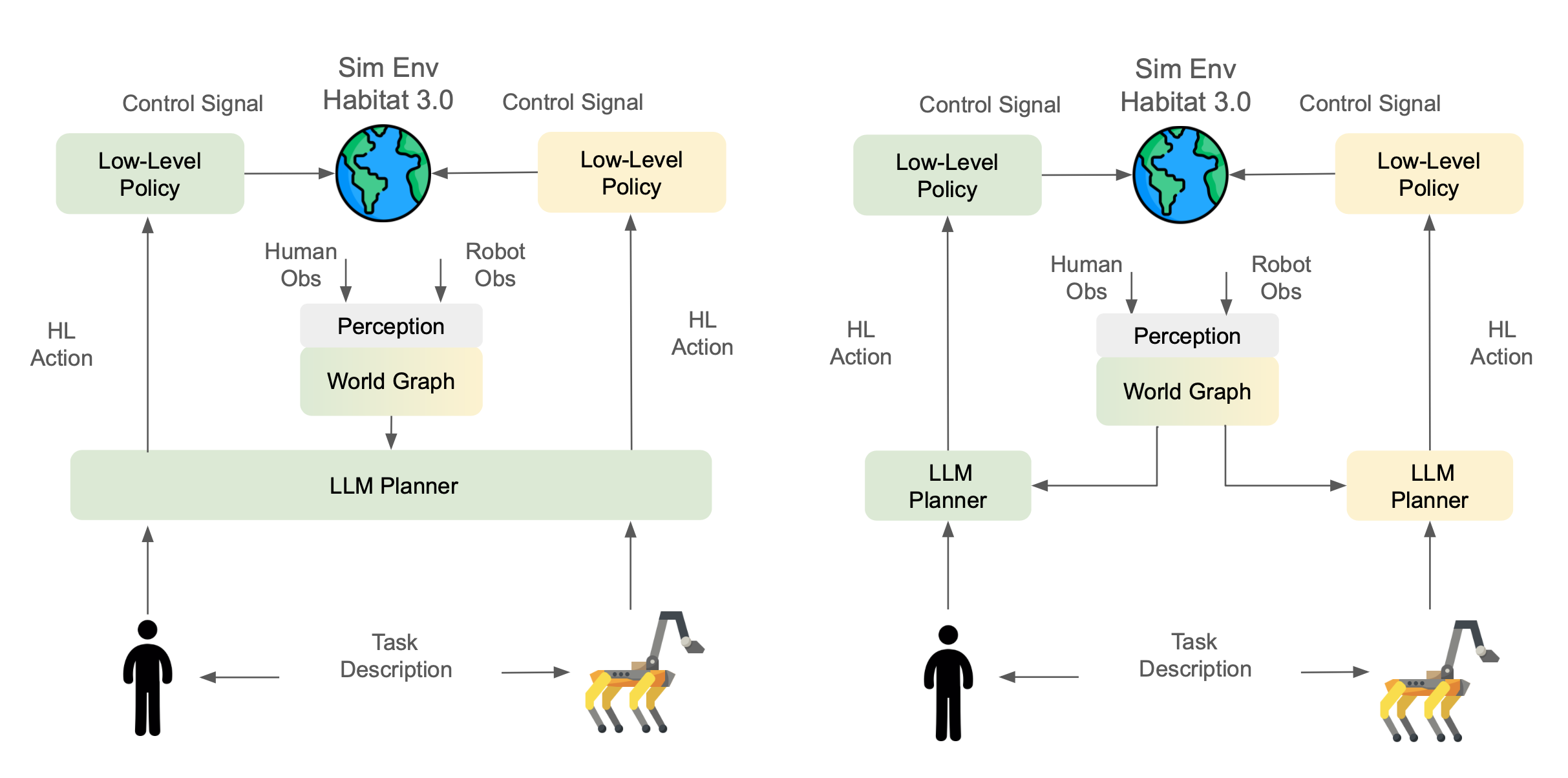
技术框架:整体框架包括环境模拟器(Meta PARTNER),大型语言模型(如o3-mini, GPT-4o, Llama 3),以及机器人智能体。流程如下:1) 接收任务描述;2) 利用大型语言模型进行任务分解和规划;3) 机器人智能体根据规划执行动作;4) 环境模拟器反馈结果;5) 循环迭代,直至任务完成。框架支持集中式和分散式控制,以及完全可观察和部分可观察环境。
关键创新:论文的关键创新在于验证了具备推理能力的大型语言模型在具身机器人协同任务中的有效性。与以往主要依赖强化学习或传统规划方法不同,该研究强调了语言模型在理解任务、推理目标和协调行动方面的潜力。通过对比不同类型的语言模型,揭示了推理能力对机器人性能的影响。
关键设计:论文的关键设计包括:1) 任务描述的格式化,以便语言模型能够理解和处理;2) 动作空间的定义,确保机器人能够执行语言模型生成的指令;3) 评估指标的选择,用于衡量机器人协同的效率和质量。具体参数设置和网络结构取决于所使用的大型语言模型,论文侧重于比较不同模型的性能,而非提出新的模型结构。
🖼️ 关键图片
📊 实验亮点
实验结果表明,OpenAI o3-mini在Meta PARTNER环境中表现优于OpenAI GPT-4o和Llama 3等非推理模型。o3-mini在集中式、分散式、完全可观察和部分可观察配置中均取得了更好的性能。这些结果突出了推理能力在具身机器人任务中的重要性,并为未来的研究方向提供了指导。
🎯 应用场景
该研究成果可应用于智能家居、自动化工厂、搜索救援等领域。通过赋予机器人更强的推理和协同能力,可以实现更高效、更灵活的自动化解决方案。未来,该技术有望推动机器人从简单的执行者向智能助手转变,在复杂环境中自主完成任务。
📄 摘要(原文)
This paper focuses on evaluating the effectiveness of Large Language Models at solving embodied robotic tasks using the Meta PARTNER benchmark. Meta PARTNR provides simplified environments and robotic interactions within randomized indoor kitchen scenes. Each randomized kitchen scene is given a task where two robotic agents cooperatively work together to solve the task. We evaluated multiple frontier models on Meta PARTNER environments. Our results indicate that reasoning models like OpenAI o3-mini outperform non-reasoning models like OpenAI GPT-4o and Llama 3 when operating in PARTNR's robotic embodied environments. o3-mini displayed outperform across centralized, decentralized, full observability, and partial observability configurations. This provides a promising avenue of research for embodied robotic development.