FineGrasp: Towards Robust Grasping for Delicate Objects
作者: Yun Du, Mengao Zhao, Tianwei Lin, Yiwei Jin, Chaodong Huang, Zhizhong Su
分类: cs.RO
发布日期: 2025-07-08
备注: 7 pages, 6 figures
💡 一句话要点
FineGrasp:面向易损物体的鲁棒抓取方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人抓取 易损物体 精细操作 标签归一化 模拟训练 语义抓取 深度学习
📋 核心要点
- 现有机器人抓取方法在处理小型或易损物体时,难以生成合适的抓取姿态,导致抓取失败。
- FineGrasp通过改进网络结构、优化标签归一化策略和引入新的模拟数据集,提升抓取精细物体的能力。
- 实验结果表明,FineGrasp在抓取小型物体方面取得了显著的性能提升,验证了其有效性。
📝 摘要(中文)
本文提出了一种名为FineGrasp的新型抓取方法,旨在提升机器人抓取小型或易损物体的能力。现有方法在处理此类物体时,难以生成可行的抓取姿态,导致整个流程失败。FineGrasp通过三个关键方面的改进来解决这个问题:首先,对网络结构进行多项修改,以增强其处理精细区域的能力;其次,解决标签不平衡问题,并提出了一种改进的抓取置信度标签归一化策略;第三,引入了一个新的模拟抓取数据集,并表明混合的模拟到真实训练进一步提高了抓取性能。实验结果表明,该方法在抓取小型物体方面有显著改进,并证实了其在语义抓取中的有效性。
🔬 方法详解
问题定义:现有机器人抓取方法在处理小型或易损物体时,由于物体尺寸小、结构脆弱,难以准确预测合适的抓取姿态。这导致抓取成功率低,甚至可能损坏物体。现有方法通常无法有效提取精细区域的特征,且训练数据中存在标签不平衡问题,进一步加剧了抓取失败的风险。
核心思路:FineGrasp的核心思路是通过增强网络对精细区域的感知能力、优化抓取置信度标签的分布以及利用模拟数据进行增强训练,从而提高抓取小型或易损物体的鲁棒性。该方法旨在解决现有方法在特征提取、标签处理和数据泛化方面的不足。
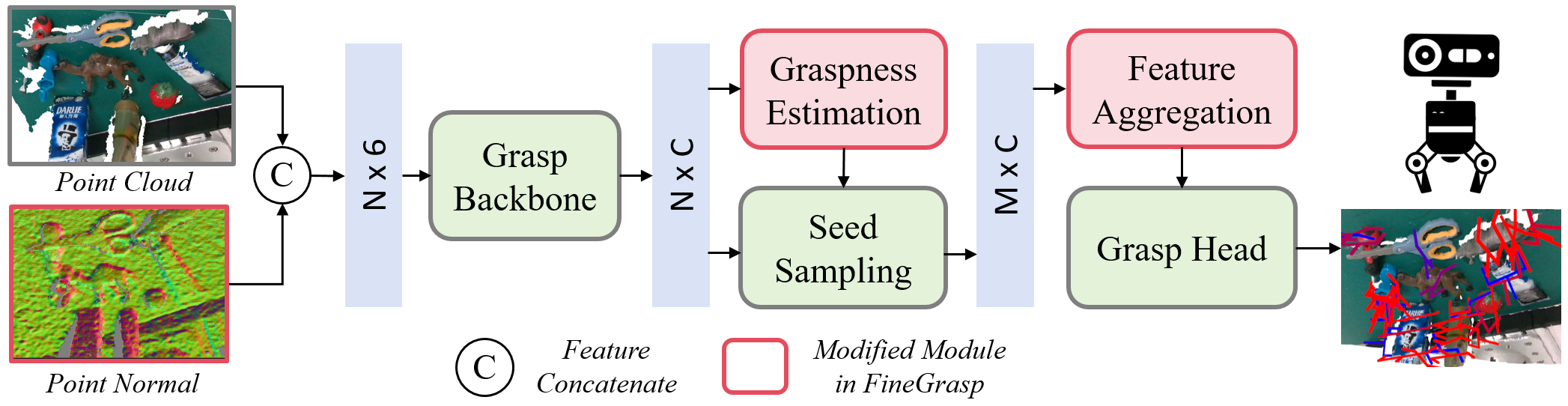
技术框架:FineGrasp的整体框架包括以下几个主要模块:1) 网络结构改进模块,用于增强对精细区域的特征提取能力;2) 抓取置信度标签归一化模块,用于解决标签不平衡问题;3) 模拟数据生成与混合训练模块,用于提高模型的泛化能力。整个流程首先通过改进的网络结构提取图像特征,然后利用优化的标签进行训练,最后通过混合模拟和真实数据进行微调。
关键创新:FineGrasp的关键创新在于三个方面:1) 针对精细区域的网络结构改进,可能包括注意力机制、多尺度特征融合等,以增强对局部细节的感知;2) 改进的抓取置信度标签归一化策略,旨在平衡正负样本比例,提高模型对抓取成功与否的判断能力;3) 新的模拟抓取数据集,用于弥补真实数据的不足,并提高模型在真实环境中的泛化能力。这些创新共同提升了抓取小型或易损物体的鲁棒性。
关键设计:具体的网络结构改进细节未知,可能包括引入更深的网络层、使用空洞卷积增大感受野、或者采用注意力机制关注关键区域。抓取置信度标签归一化策略的具体实现方式未知,可能采用加权损失函数或重采样等方法。模拟数据集的生成方式和数据规模未知,但其目的是提供更多样化的训练样本,并模拟真实环境中的噪声和变化。
🖼️ 关键图片

📊 实验亮点
论文实验结果表明,FineGrasp在抓取小型物体方面取得了显著的性能提升。具体的性能数据和对比基线未知,但摘要中明确指出该方法在抓取小型物体方面有“显著改进”,并证实了其在语义抓取中的有效性。混合模拟到真实训练进一步提高了抓取性能,表明该方法具有良好的泛化能力。
🎯 应用场景
FineGrasp技术可应用于自动化装配、医疗手术机器人、家庭服务机器人等领域。在自动化装配中,可用于抓取和装配精密的电子元件;在医疗手术机器人中,可用于抓取和操作脆弱的生物组织;在家庭服务机器人中,可用于抓取和整理小件物品。该技术能够提高机器人操作的精度和可靠性,降低操作风险,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
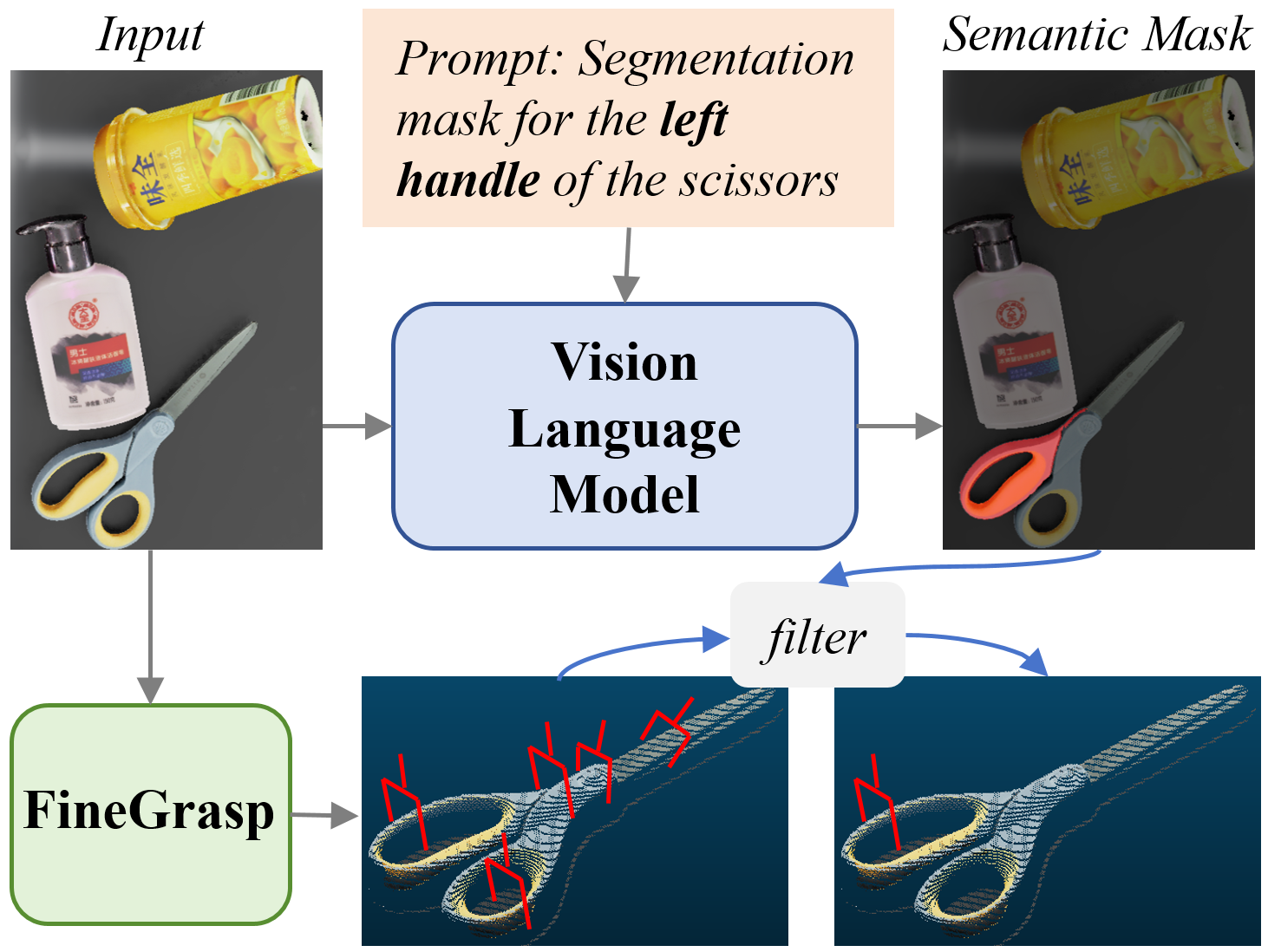
Recent advancements in robotic grasping have led to its integration as a core module in many manipulation systems. For instance, language-driven semantic segmentation enables the grasping of any designated object or object part. However, existing methods often struggle to generate feasible grasp poses for small objects or delicate components, potentially causing the entire pipeline to fail. To address this issue, we propose a novel grasping method, FineGrasp, which introduces improvements in three key aspects. First, we introduce multiple network modifications to enhance the ability of to handle delicate regions. Second, we address the issue of label imbalance and propose a refined graspness label normalization strategy. Third, we introduce a new simulated grasp dataset and show that mixed sim-to-real training further improves grasp performance. Experimental results show significant improvements, especially in grasping small objects, and confirm the effectiveness of our system in semantic grasping.