Rapid and Safe Trajectory Planning over Diverse Scenes through Diffusion Composition
作者: Wule Mao, Zhouheng Li, Yunhao Luo, Yilun Du, Lei Xie
分类: cs.RO, eess.SY
发布日期: 2025-07-06 (更新: 2025-11-26)
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于扩散模型的轨迹规划框架,实现复杂场景下的快速安全轨迹生成。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹规划 扩散模型 机器人 安全控制 运动规划 模型预测控制 自主导航
📋 核心要点
- 现有轨迹规划方法难以兼顾复杂环境下的实时性和安全性,尤其是在未知场景中泛化能力不足。
- 该论文提出一种基于扩散模型的轨迹规划框架,通过组合多个扩散模型,提升在未知场景下的安全性和泛化能力。
- 实验表明,该方法在F1TENTH车辆上实现了实时推理,并在已见和未见场景中均表现出较高的安全性和稳定性。
📝 摘要(中文)
在复杂环境中进行安全轨迹规划需要在严格的避障和实时的效率之间取得平衡,这是机器人领域一个长期存在的挑战。本文提出了一种基于扩散模型的轨迹规划框架,该框架既快速又安全。首先,我们引入了一种与场景无关的、基于MPC的数据生成流程,可以高效地生成大量运动学上可行的轨迹。基于此数据集,我们集成的扩散规划器将原始的板载传感器输入直接映射到运动学上可行的轨迹,从而实现高效的推理,同时保持强大的避障能力。为了推广到多样化的、以前未见过的场景,我们在测试时组合扩散模型,从而在无需额外训练的情况下实现安全行为。我们进一步提出了一种轻量级的、基于规则的安全滤波器,该滤波器从候选集中选择满足安全和运动学可行性要求的轨迹。在已见和未见的环境中,所提出的方法都提供了具有高安全性和稳定性的实时推理能力。在F1TENTH车辆上的实验证明了在真实硬件上的实用性。
🔬 方法详解
问题定义:论文旨在解决复杂环境中机器人轨迹规划的实时性和安全性问题。现有方法,如传统的优化方法,计算复杂度高,难以满足实时性要求;而基于学习的方法,在面对未知的、多样化的场景时,泛化能力不足,容易出现碰撞等安全问题。
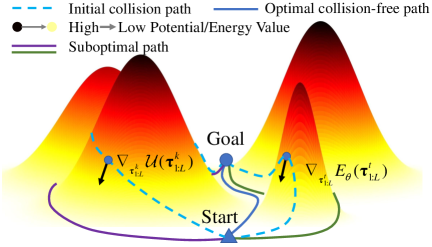
核心思路:论文的核心思路是利用扩散模型学习运动学可行的轨迹分布,并结合模型预测控制(MPC)生成训练数据。通过在测试时组合多个扩散模型,增强模型在未知场景下的泛化能力和安全性。此外,还引入了一个轻量级的安全滤波器,用于从候选轨迹中选择满足安全和运动学可行性要求的轨迹。
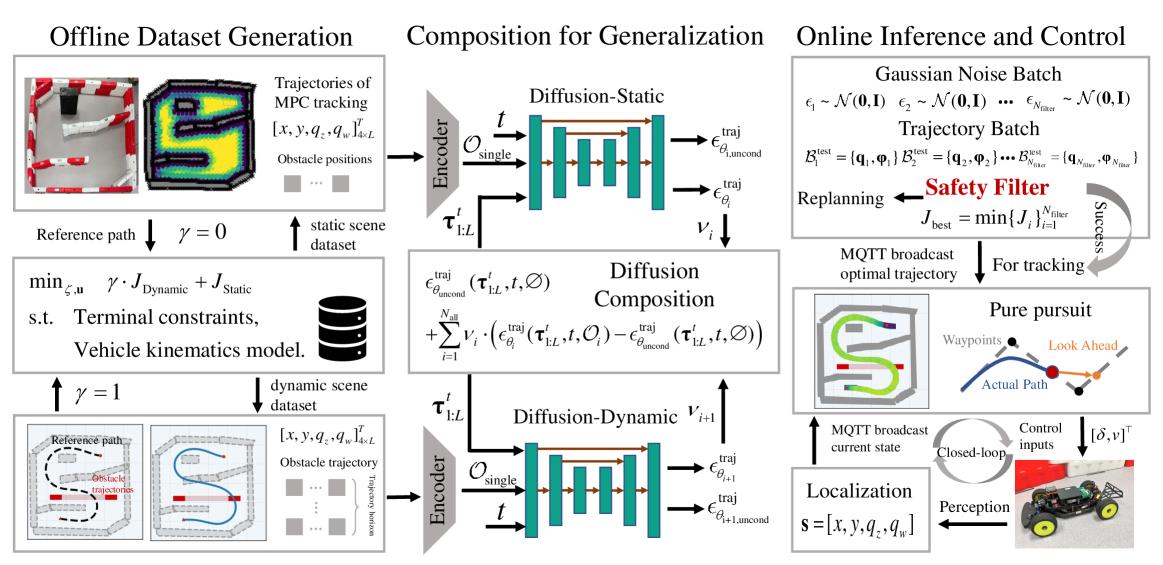
技术框架:该轨迹规划框架主要包含三个阶段:1) 数据生成阶段:使用基于MPC的方法生成大量运动学可行的轨迹数据,用于训练扩散模型。2) 扩散模型训练阶段:训练一个或多个扩散模型,学习轨迹的分布。3) 测试阶段:将原始传感器数据输入到训练好的扩散模型中,生成候选轨迹;然后,通过组合多个扩散模型,提高轨迹的多样性和安全性;最后,使用安全滤波器选择最优轨迹。
关键创新:该论文的关键创新在于:1) 提出了一种基于扩散模型的轨迹规划方法,可以直接从传感器数据生成运动学可行的轨迹。2) 提出了一种在测试时组合多个扩散模型的方法,提高了模型在未知场景下的泛化能力和安全性。3) 引入了一个轻量级的安全滤波器,用于保证轨迹的安全性和运动学可行性。
关键设计:在数据生成阶段,使用MPC生成轨迹时,需要仔细设计奖励函数,以保证轨迹的运动学可行性和安全性。在扩散模型训练阶段,可以选择不同的网络结构和损失函数,以提高模型的生成质量。在测试阶段,需要合理选择组合的扩散模型,并设计安全滤波器的规则。
🖼️ 关键图片

📊 实验亮点
该方法在F1TENTH车辆上进行了实验验证,结果表明,该方法能够在已见和未见场景中实现实时推理,并保持较高的安全性和稳定性。与传统的轨迹规划方法相比,该方法在保证安全性的前提下,显著提高了规划速度。项目主页提供了更多实验细节和视频。
🎯 应用场景
该研究成果可应用于自动驾驶、机器人导航、无人机飞行等领域,尤其是在复杂、动态和未知的环境中。通过提高轨迹规划的实时性和安全性,可以提升机器人的自主性和可靠性,降低安全风险,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Safe trajectory planning in complex environments must balance stringent collision avoidance with real-time efficiency, which is a long-standing challenge in robotics. In this work, we present a diffusion-based trajectory planning framework that is both rapid and safe. First, we introduce a scene-agnostic, MPC-based data generation pipeline that efficiently produces large volumes of kinematically feasible trajectories. Building on this dataset, our integrated diffusion planner maps raw onboard sensor inputs directly to kinematically feasible trajectories, enabling efficient inference while maintaining strong collision avoidance. To generalize to diverse, previously unseen scenarios, we compose diffusion models at test time, enabling safe behavior without additional training. We further propose a lightweight, rule-based safety filter that, from the candidate set, selects the trajectory meeting safety and kinematic-feasibility requirements. Across seen and unseen settings, the proposed method delivers real-time-capable inference with high safety and stability. Experiments on an F1TENTH vehicle demonstrate practicality on real hardware. Project page: https://rstp-comp-diffuser.github.io/.