Vibration of Soft, Twisted Beams for Under-Actuated Quadrupedal Locomotion
作者: Yuhao Jiang, Fuchen Chen, Jamie Paik, Daniel M. Aukes
分类: cs.RO
发布日期: 2025-07-03
备注: This manuscript is under revision for possible publication in the IEEE/ASME Transactions on Mechatronics. Copyright may be transferred to IEEE if the manuscript is accepted for publication, without further notice. Supplementary videos: https://youtu.be/T3d6FT3Rx-s, https://youtu.be/nPQrhKlN02E
💡 一句话要点
Flix-Walker:基于柔性扭曲梁振动的欠驱动四足机器人运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 欠驱动 柔性机构 振动驱动 步态控制
📋 核心要点
- 现有机器人驱动和控制面临挑战,欠驱动柔性机器人通过内嵌动态行为提供了一种有前景的解决方案。
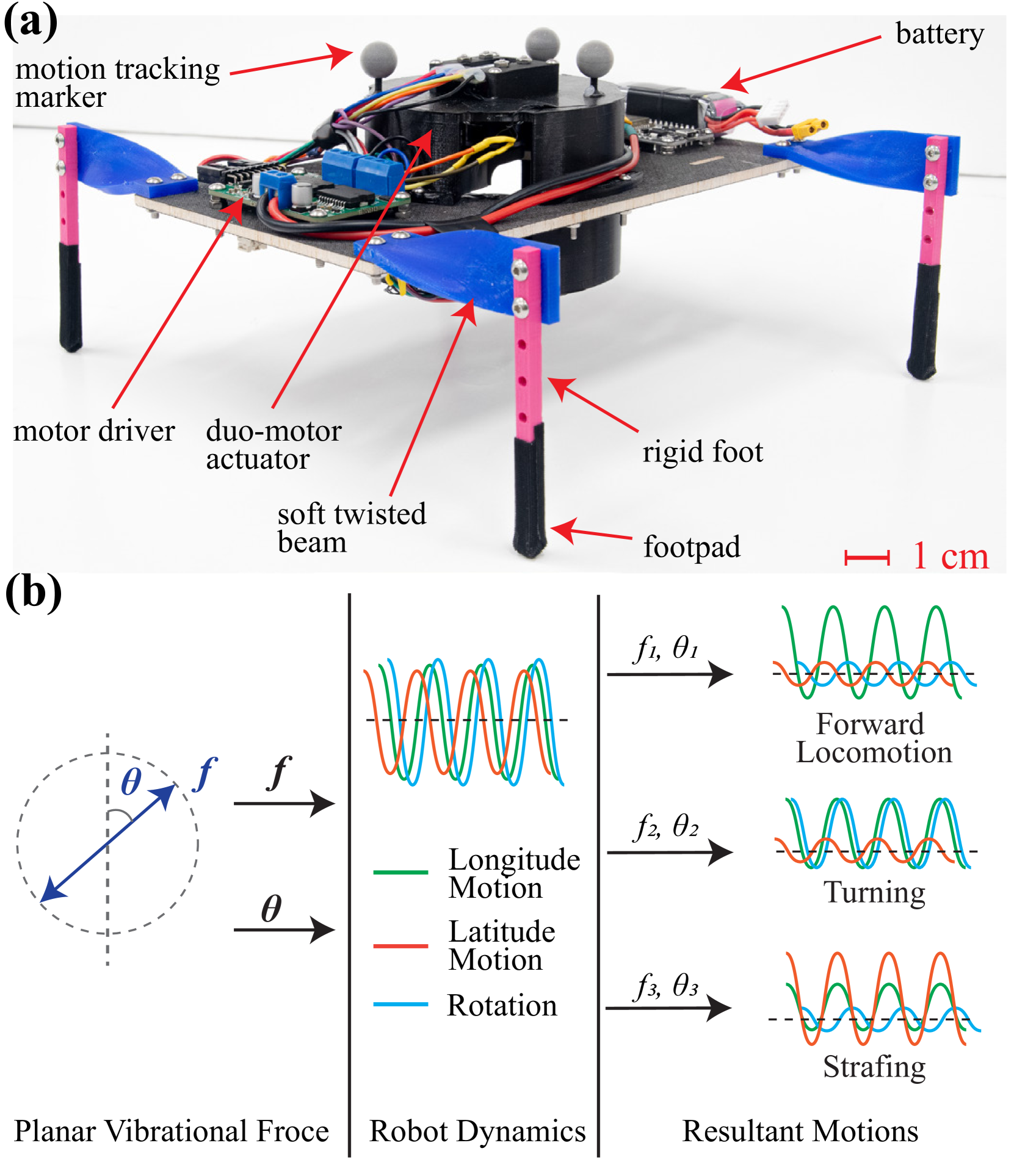
- Flix-Walker采用柔性螺旋梁作为腿,仅用两个电机振动驱动,实现多种运动模式,简化了控制。
- 实验验证了驱动参数的有效性和鲁棒性,实现了可靠的轨迹跟踪和自主导航,提升了机器人性能。
📝 摘要(中文)
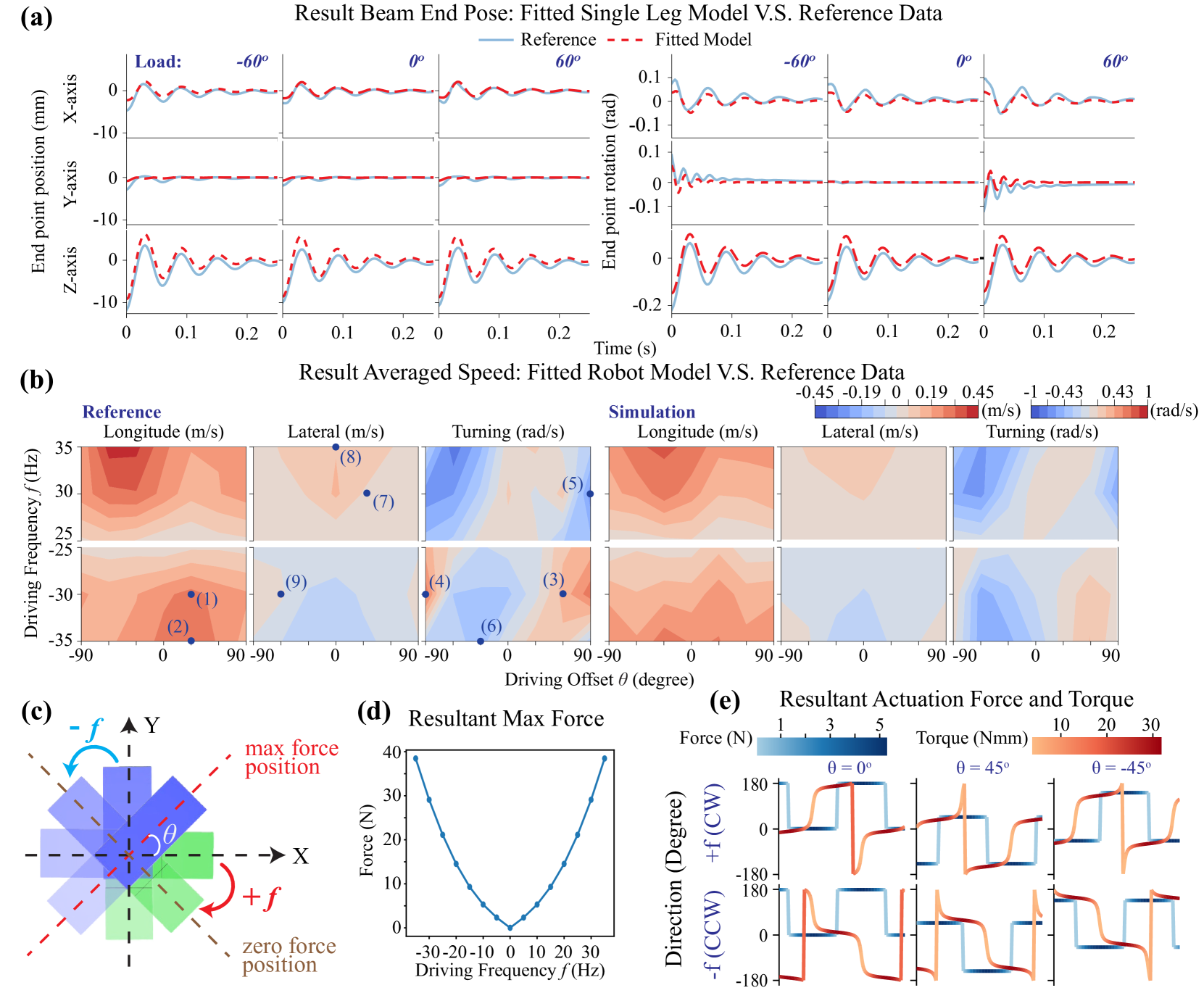
本文提出了一种新型的、无束缚的、厘米级的四足机器人Flix-Walker,该机器人受到柔性欠驱动机构的启发,旨在通过利用预先设计的、内嵌的动态行为来缓解驱动和控制方面的挑战。Flix-Walker采用柔性的螺旋形梁作为腿,通过仅由两个电机产生的振动来驱动,从而实现三种不同的移动模式。我们通过仿真和原型实验分析了生成各种运动模式所需的驱动参数。研究了系统和环境变化对运动性能的影响,并提出了一种通用指标,用于选择产生稳健和功能性运动的控制参数。实验验证了这些驱动参数在闭环控制框架内的有效性和鲁棒性,展示了可靠的轨迹跟踪和自主导航能力。
🔬 方法详解
问题定义:现有小型四足机器人通常需要复杂的驱动和控制系统,导致成本高昂、能耗大,且难以适应复杂环境。Flix-Walker旨在解决这一问题,通过简化驱动系统,利用柔性结构的固有动态特性实现高效运动。
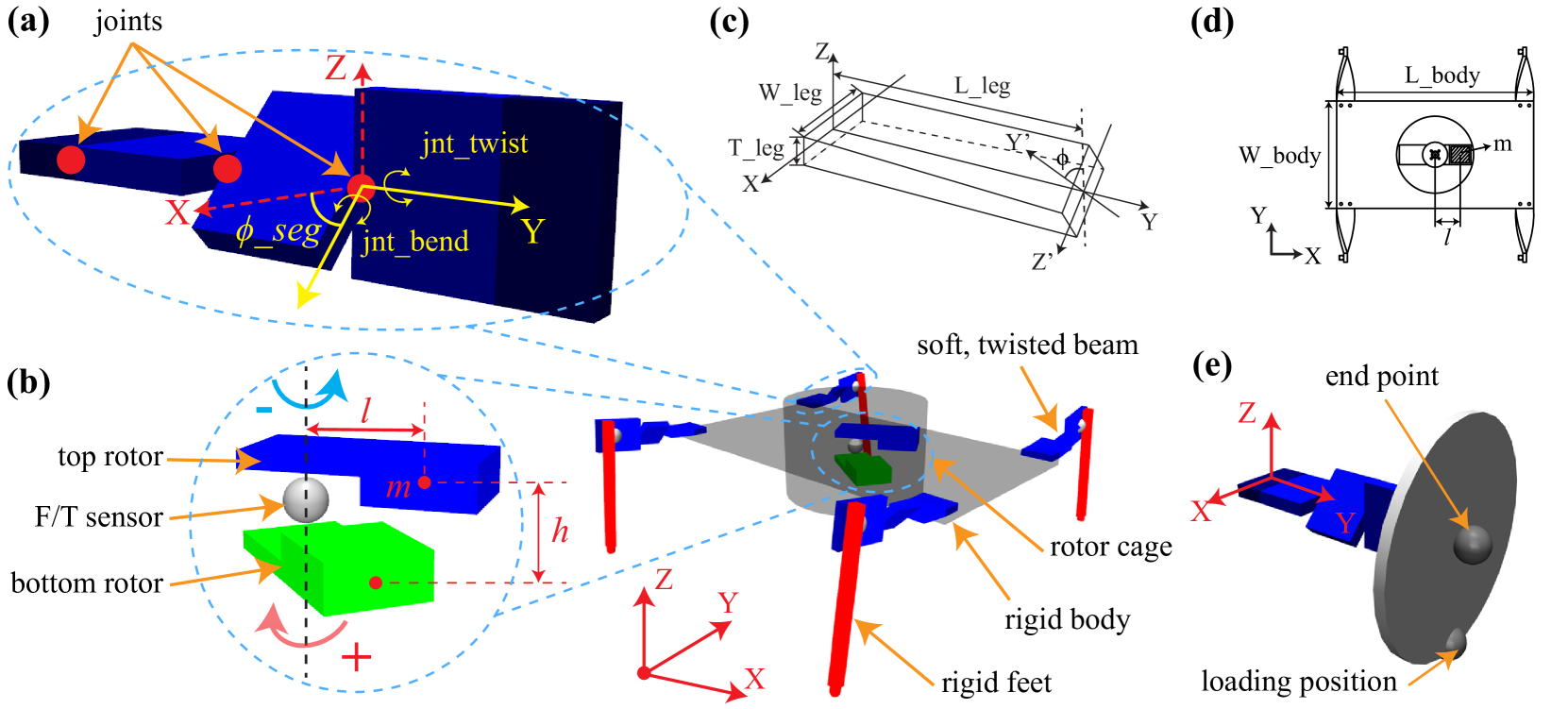
核心思路:核心思路是利用柔性扭曲梁(螺旋形梁)的振动特性来实现机器人的运动。通过控制两个电机的振动频率和幅度,可以激发梁的不同振动模式,从而产生不同的步态。这种方法减少了对精确控制的需求,降低了系统的复杂性。
技术框架:Flix-Walker的整体架构包括:1)两个电机,用于产生振动;2)柔性螺旋形梁,作为机器人的腿;3)控制系统,用于调节电机的振动参数。控制系统根据期望的运动模式,调整电机的频率和幅度,从而控制机器人的运动。通过闭环控制,机器人能够实现轨迹跟踪和自主导航。
关键创新:关键创新在于将柔性扭曲梁的振动特性与欠驱动控制相结合。传统四足机器人通常需要多个电机来控制每条腿的运动,而Flix-Walker仅使用两个电机,通过梁的固有振动模式来实现多种运动模式。这种方法显著降低了系统的复杂性和成本。
关键设计:关键设计包括:1)螺旋形梁的几何参数,如螺旋半径、螺距等,这些参数影响梁的振动频率和幅度;2)电机的振动频率和幅度,这些参数直接决定了机器人的运动模式;3)控制算法,用于根据期望的运动轨迹,调整电机的振动参数。论文提出了一种通用指标,用于选择产生稳健和功能性运动的控制参数。
🖼️ 关键图片
📊 实验亮点
实验结果表明,Flix-Walker能够实现三种不同的运动模式,并且在闭环控制下能够可靠地跟踪预定轨迹。论文提出了一种通用指标,用于选择产生稳健运动的控制参数,实验验证了该指标的有效性。此外,实验还展示了Flix-Walker在面对系统和环境变化时的鲁棒性。
🎯 应用场景
Flix-Walker的设计理念和技术方案可应用于小型机器人、医疗机器人、以及在复杂或受限空间内作业的机器人。其低成本、低功耗的特点使其在资源有限的环境中具有优势。未来,该技术有望应用于搜索救援、环境监测、以及微创手术等领域。
📄 摘要(原文)
Under-actuated compliant robotic systems offer a promising approach to mitigating actuation and control challenges by harnessing pre-designed, embodied dynamic behaviors. This paper presents Flix-Walker, a novel, untethered, centimeter-scale quadrupedal robot inspired by compliant under-actuated mechanisms. Flix-Walker employs flexible, helix-shaped beams as legs, which are actuated by vibrations from just two motors to achieve three distinct mobility modes. We analyze the actuation parameters required to generate various locomotion modes through both simulation and prototype experiments. The effects of system and environmental variations on locomotion performance are examined, and we propose a generic metric for selecting control parameters that produce robust and functional motions. Experiments validate the effectiveness and robustness of these actuation parameters within a closed-loop control framework, demonstrating reliable trajectory-tracking and self-navigation capabilities.