Large Language Model-Driven Closed-Loop UAV Operation with Semantic Observations
作者: Wenhao Wang, Yanyan Li, Long Jiao, Jiawei Yuan
分类: cs.RO
发布日期: 2025-07-02 (更新: 2025-12-31)
备注: 13 pages, 10 figures
DOI: 10.1109/JIOT.2025.3649376
💡 一句话要点
提出基于大语言模型驱动的闭环无人机操作框架,提升复杂任务中的可靠性。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 无人机控制 大语言模型 闭环控制 代码生成 语义理解 仿真优化 机器人自主操作
📋 核心要点
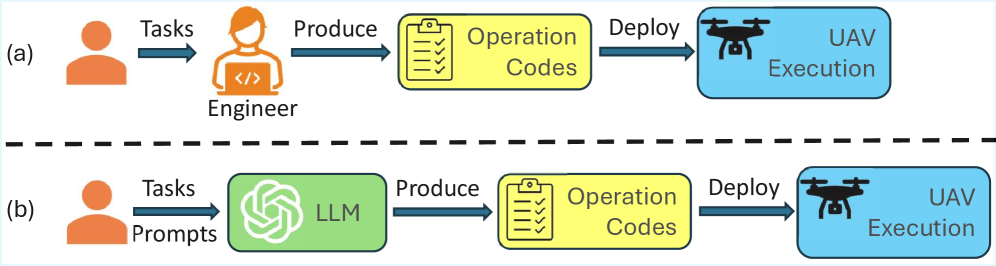
- 现有大语言模型在无人机等移动机器人上的应用面临逻辑推理和复杂决策的挑战,导致可靠性问题。
- 提出闭环框架,利用代码生成器和评估器两个LLM模块,通过反馈和优化提升无人机操作的可靠性。
- 实验表明,该框架在无人机控制任务中显著优于基线方法,尤其在任务复杂度增加时,成功率和完整性更高。
📝 摘要(中文)
本文提出了一种基于大语言模型(LLM)驱动的闭环无人机操作代码生成框架,旨在通过有效的反馈和优化,实现可靠的无人机操作。该框架包含代码生成器和评估器两个LLM模块。框架将无人机操作中的数值状态观测转换为语义轨迹描述,以增强评估器LLM对无人机动态的理解,从而生成更精确的反馈。此外,该框架还支持基于仿真的优化过程,消除了因错误代码执行对物理无人机造成的风险。在不同复杂度的无人机控制任务上进行了大量实验,结果表明,该框架能够利用LLM实现可靠的无人机操作,在成功率和完整性方面显著优于基线方法,尤其是在任务复杂度增加时。
🔬 方法详解
问题定义:现有方法直接使用大语言模型控制无人机,面临逻辑推理和复杂决策的挑战,导致在实际IoT应用中可靠性不足。尤其是在复杂任务中,LLM生成的代码容易出错,难以保证无人机的安全稳定运行。
核心思路:论文的核心思路是构建一个闭环反馈系统,通过评估器对代码生成器的输出进行评估和优化。将无人机的数值状态观测转化为语义描述,使得评估器能够更好地理解无人机的运动状态,从而提供更精确的反馈。同时,利用仿真环境进行代码优化,避免了在真实无人机上直接运行错误代码的风险。
技术框架:该框架包含两个主要模块:代码生成器和评估器。代码生成器负责根据任务描述生成无人机控制代码。评估器接收无人机的状态观测(转化为语义描述)和代码生成器的输出,评估代码的执行效果,并生成反馈信息。框架通过迭代的方式,不断优化代码生成器的输出,直到满足任务要求。整个过程在仿真环境中进行,确保安全。
关键创新:最重要的创新点在于将数值状态观测转化为语义轨迹描述,这使得评估器能够更好地理解无人机的运动状态,从而生成更精确的反馈。此外,利用仿真环境进行代码优化,避免了在真实无人机上直接运行错误代码的风险,提高了系统的安全性。
关键设计:论文中,状态观测到语义描述的转换方式是关键设计之一,具体转换方法未知。评估器的具体实现(例如,使用的LLM模型、训练数据等)也未知。仿真环境的搭建和配置对实验结果有重要影响,但具体细节未知。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该框架在无人机控制任务中显著优于基线方法。具体而言,在复杂度较高的任务中,该框架的成功率和完整性明显高于基线方法,表明其在复杂环境下的可靠性优势。具体的性能提升数据未知,但摘要强调了“significantly outperforms”基线方法。
🎯 应用场景
该研究成果可应用于各种需要无人机自主操作的场景,例如:智能巡检、物流配送、环境监测、灾害救援等。通过提高无人机操作的可靠性和智能化水平,可以降低人工成本,提高工作效率,并在危险环境中执行任务,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Recent advances in large Language Models (LLMs) have revolutionized mobile robots, including unmanned aerial vehicles (UAVs), enabling their intelligent operation within Internet of Things (IoT) ecosystems. However, LLMs still face challenges from logical reasoning and complex decision-making, leading to concerns about the reliability of LLM-driven UAV operations in IoT applications. In this paper, we propose a closed-loop LLM-driven UAV operation code generation framework that enables reliable UAV operations powered by effective feedback and refinement using two LLM modules, i.e., a Code Generator and an Evaluator. Our framework transforms numerical state observations from UAV operations into semantic trajectory descriptions to enhance the evaluator LLM's understanding of UAV dynamics for precise feedback generation. Our framework also enables a simulation-based refinement process, and hence eliminates the risks to physical UAVs caused by incorrect code execution during the refinement. Extensive experiments on UAV control tasks with different complexities are conducted. The experimental results show that our framework can achieve reliable UAV operations using LLMs, which significantly outperforms baseline methods in terms of success rate and completeness with the increase of task complexity.