DexWrist: A Robotic Wrist for Constrained and Dynamic Manipulation
作者: Martin Peticco, Gabriella Ulloa, John Marangola, Nitish Dashora, Pulkit Agrawal
分类: cs.RO
发布日期: 2025-07-01 (更新: 2025-09-25)
备注: 9 pages, 8 figures. Submitted to ICRA 2026
💡 一句话要点
提出DexWrist机器人腕部,提升约束和动态操作中的策略学习效率与成功率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人腕部 动态操作 约束环境 策略学习 低阻抗驱动
📋 核心要点
- 传统机器人腕部在人机交互环境中尺寸过大,或依赖于高减速比刚性驱动器,难以支持动态、富接触任务。
- DexWrist采用低阻抗驱动和紧凑设计,旨在解决传统腕部的局限性,简化策略学习,提升在约束环境下的操作性能。
- 实验表明,DexWrist显著提高了策略成功率(50-55%)并缩短了任务完成时间(3-5倍),验证了其有效性。
📝 摘要(中文)
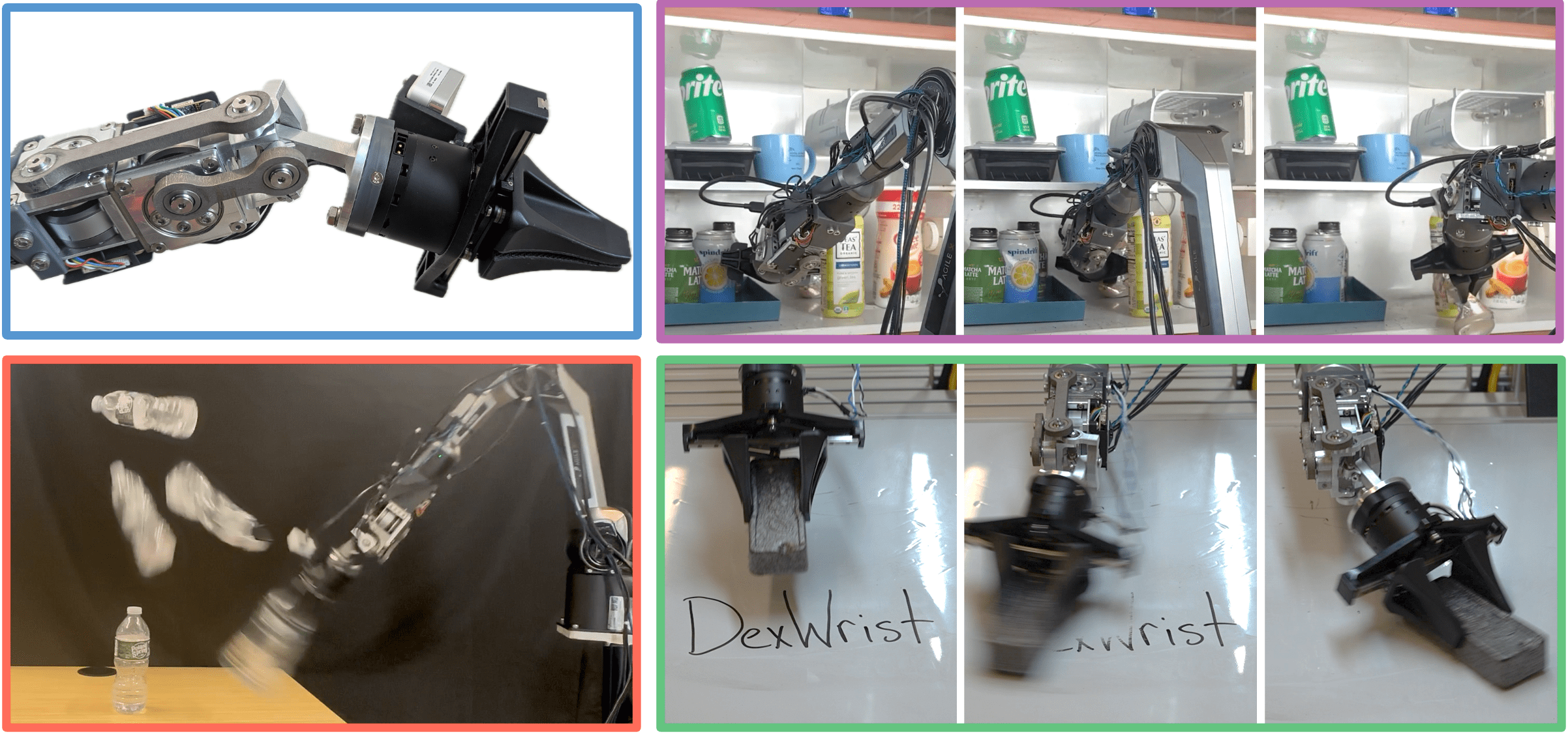
本文提出了一种名为DexWrist的机器人腕部,旨在推进机器人操作在高度约束环境中的应用,实现动态和富接触任务,并简化策略学习。DexWrist具有低阻抗驱动、低惯性、集成本体感受、高速度和大工作空间等特点,这些能力共同支持了鲁棒的基于学习的操作。DexWrist通过以下方式加速策略学习:(i) 实现更快的遥操作以进行可扩展的数据收集;(ii) 通过更短的轨迹和解耦的自由度 (DOFs) 简化学习函数;(iii) 提供自然的背驱性,无需复杂的柔顺控制器即可实现安全接触;(iv) 扩大杂乱场景中的操作工作空间。实验结果表明,DexWrist将策略成功率提高了50-55%,并将任务完成时间缩短了3-5倍。
🔬 方法详解
问题定义:论文旨在解决现有机器人腕部在约束和动态操作环境中表现不佳的问题。传统腕部设计通常体积庞大,或者使用高减速比的刚性驱动器,这使得它们难以在狭小空间内操作,并且不适合需要频繁接触和动态调整的任务。此外,一些紧凑型腕部设计虽然使用了可反向驱动的准直接驱动(QDD)执行器,但由于运动学耦合或高机械惯性,难以建模和控制。
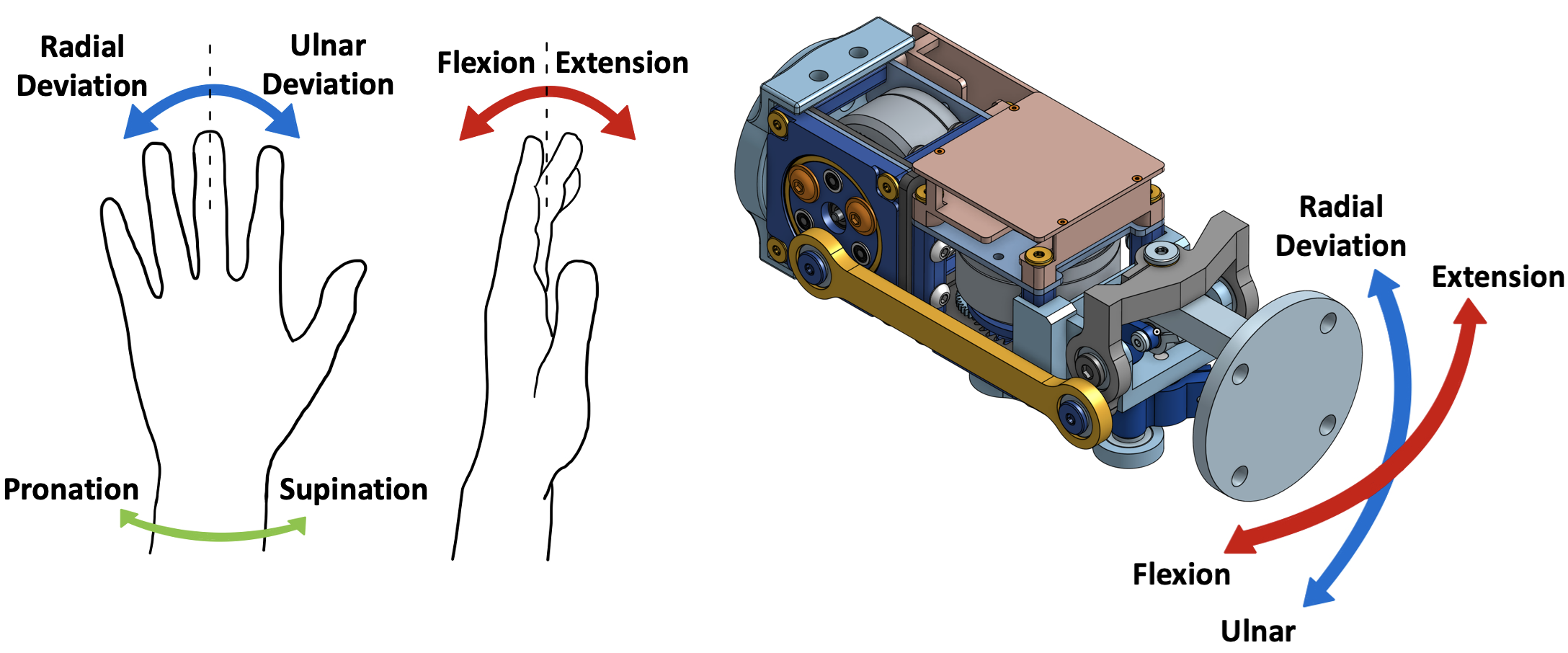
核心思路:DexWrist的核心思路是通过优化腕部的机械设计和驱动方式,使其具有低阻抗、低惯性、高速度和大工作空间等特性。这些特性使得机器人能够更灵活地在约束环境中操作,并更容易学习控制策略。通过降低阻抗和惯性,DexWrist能够更好地适应外部接触力,从而实现更安全和更高效的动态操作。
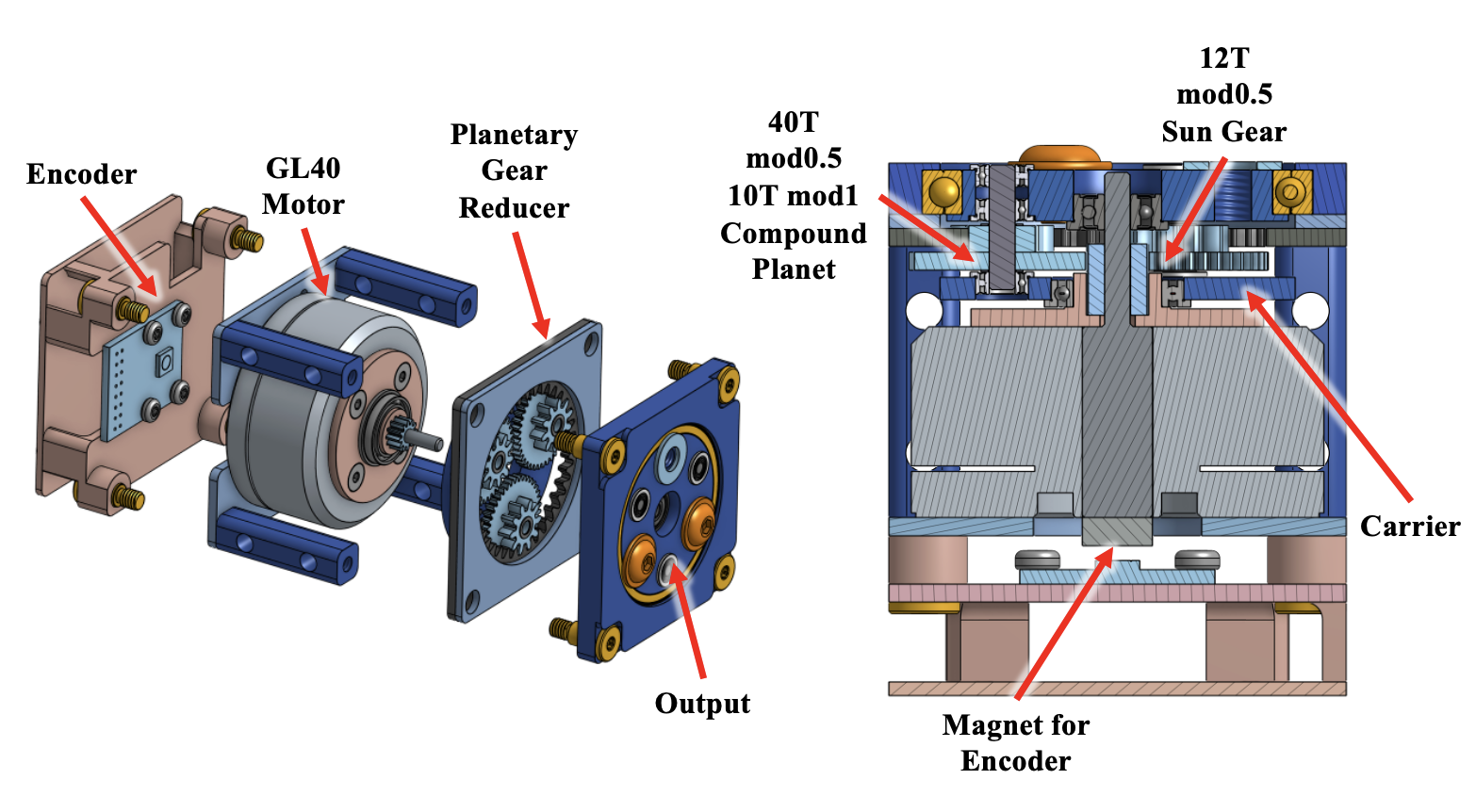
技术框架:DexWrist的整体架构包括:(1) 低阻抗准直接驱动器,用于提供精确和灵敏的力矩控制;(2) 轻量化和紧凑的机械结构,以降低惯性并扩大工作空间;(3) 集成的本体感受传感器,用于精确测量关节角度和速度;(4) 优化的控制算法,用于实现精确的运动控制和力控制。该框架旨在实现高性能的动态操作,并简化策略学习过程。
关键创新:DexWrist的关键创新在于其将低阻抗驱动、低惯性设计和集成本体感受相结合,从而实现了高性能的动态操作和简化的策略学习。与传统的腕部设计相比,DexWrist具有更低的阻抗和惯性,这使得它能够更好地适应外部接触力,并更容易学习控制策略。此外,DexWrist的紧凑设计使其能够在狭小空间内操作,从而扩大了其应用范围。
关键设计:DexWrist的关键设计包括:(1) 采用准直接驱动器,以降低阻抗并提高响应速度;(2) 使用轻量化材料和优化结构设计,以降低惯性;(3) 集成高精度编码器和力/力矩传感器,以提供精确的本体感受信息;(4) 设计优化的控制算法,以实现精确的运动控制和力控制。具体的参数设置、损失函数和网络结构等技术细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,DexWrist在策略学习方面取得了显著的提升。与传统腕部相比,DexWrist将策略成功率提高了50-55%,并将任务完成时间缩短了3-5倍。这些结果表明,DexWrist的低阻抗、低惯性和大工作空间等特性能够显著提高机器人的操作性能,并简化策略学习过程。
🎯 应用场景
DexWrist具有广泛的应用前景,包括:(1) 狭小空间内的装配和操作;(2) 医疗手术机器人;(3) 康复机器人;(4) 人机协作机器人。其低阻抗和高灵敏度特性使其能够安全地与人交互,并执行需要精确控制的任务。未来,DexWrist有望在更多领域得到应用,并推动机器人技术的进一步发展。
📄 摘要(原文)
Development of dexterous manipulation hardware has primarily focused on hands and grippers. However, robotic wrists are equally critical, often playing a greater role than the end effector itself. Many conventional wrist designs fall short in human environments because they are too large or rely on rigid, high-reduction actuators that cannot support dynamic, contact-rich tasks. Some designs address these issues using backdrivable quasi-direct drive (QDD) actuators and compact form factors. However, they are often difficult to model and control due to coupled kinematics or high mechanical inertia. We present DexWrist, a robotic wrist that is designed to advance robotic manipulation in highly constrained environments, enable dynamic and contact-rich tasks, and simplify policy learning. DexWrist provides low-impedance actuation, low inertia, integrated proprioception, high speed, and a large workspace. Together, these capabilities support robust learning-based manipulation. DexWrist accelerates policy learning by: (i) enabling faster teleoperation for scalable data collection, (ii) simplifying the learned function through shorter trajectories and decoupled degrees of freedom (DOFs), (iii) providing natural backdrivability for safe contact without complex compliant controllers, and (iv) expanding the manipulation workspace in cluttered scenes. In our experiments, DexWrist improved policy success rates by 50-55% and reduced task completion times by a factor of 3-5. More details about the wrist can be found at https://dexwrist.csail.mit.edu.