Robust Peg-in-Hole Assembly under Uncertainties via Compliant and Interactive Contact-Rich Manipulation
作者: Yiting Chen, Kenneth Kimble, Howard H. Qian, Podshara Chanrungmaneekul, Robert Seney, Kaiyu Hang
分类: cs.RO
发布日期: 2025-06-28
备注: Accepted to Robotics: Science and Systems (RSS) 2025; 16 pages, 10 figures
💡 一句话要点
提出一种基于柔顺性和交互式接触的鲁棒孔轴装配方法,解决不确定性下的高精度装配问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 孔轴装配 机器人操作 柔顺性控制 接触交互 不确定性处理
📋 核心要点
- 高精度孔轴装配在工业应用中至关重要,但感知和物理不确定性使其成为挑战。
- 论文提出利用轴与孔之间的接触,通过柔顺性和交互式操作来消除不确定性,实现鲁棒装配。
- 实验表明,该系统在不同场景下均表现出良好的鲁棒性,无需学习即可有效完成装配任务。
📝 摘要(中文)
本文研究了在不确定环境下,如何利用孔轴之间的接触来消除装配过程中的不确定性,从而实现鲁棒且自适应的机器人孔轴装配。通过分析接触约束下的柔顺性作用,提出了一种操作策略,该策略规划包含碰撞的交互,使轴能够迭代地识别任务环境以定位目标孔,并利用环境接触约束来优化插入运动,而无需精确的感知。将上述过程概念化为不同状态空间中漏斗的组合,提出了一种构建操作漏斗的形式化方法,作为孔轴装配的不确定性吸收范例。该系统能够有效地推广到不同尺度、形状和材料的各种孔轴装配场景,且无需学习。在NIST装配任务板(ATB)和更具挑战性的场景中进行的大量实验验证了其在实际应用中的鲁棒性。
🔬 方法详解
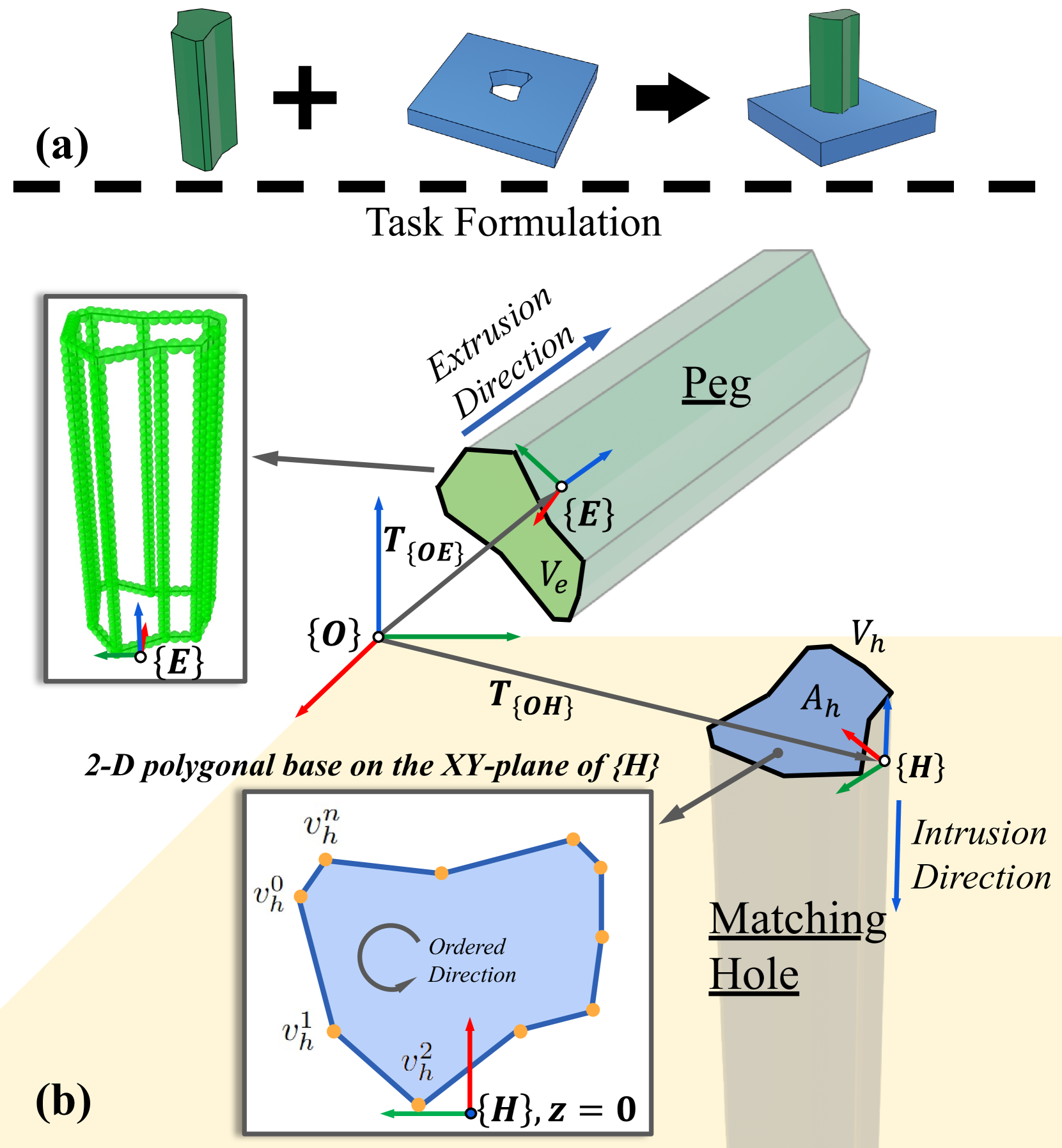
问题定义:论文旨在解决高精度孔轴装配中,由于感知和物理不确定性导致的装配失败问题。现有方法通常依赖于精确的感知和控制,但在实际应用中,接触过程中的不确定性容易超出允许的间隙,导致装配失败。因此,如何在存在不确定性的情况下实现鲁棒的孔轴装配是一个关键挑战。
核心思路:论文的核心思路是利用轴与孔之间的接触信息,通过柔顺性和交互式操作来逐步消除不确定性。具体来说,通过规划包含碰撞的交互运动,使轴能够迭代地识别环境并定位目标孔。同时,利用环境接触约束来优化插入运动,从而实现无需精确感知的鲁棒装配。
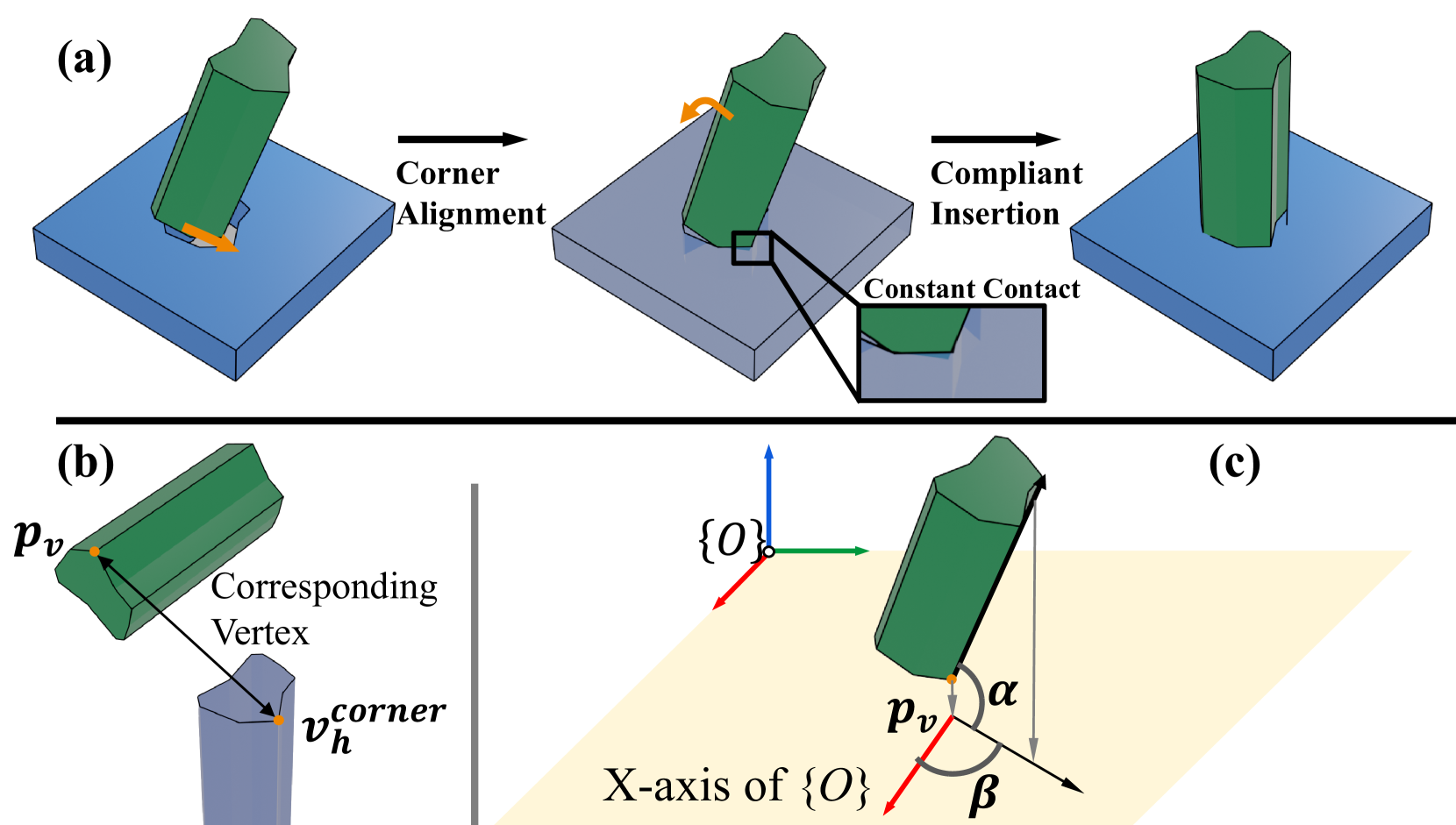
技术框架:该方法将孔轴装配过程视为不同状态空间中漏斗的组合。整体流程包括:1) 初始定位:通过粗略的感知信息确定轴的大致位置。2) 交互式探索:规划包含碰撞的运动,使轴与环境发生接触,从而迭代地识别目标孔的位置。3) 约束优化:利用接触约束信息,优化插入运动,减小不确定性,最终实现成功装配。
关键创新:该方法最重要的创新点在于其不依赖于精确的感知,而是通过与环境的交互来逐步消除不确定性。与传统的基于视觉或力/力矩反馈的装配方法不同,该方法更加鲁棒,能够适应各种不确定性环境。此外,将装配过程建模为漏斗的组合,为形式化分析和优化装配策略提供了理论基础。
关键设计:论文的关键设计包括:1) 柔顺性控制:通过控制机器人的柔顺性,使其能够适应接触过程中的力变化,避免卡死或损坏。2) 碰撞规划:规划包含碰撞的运动,使轴能够与环境发生接触,从而获取环境信息。3) 接触约束优化:利用接触力信息,优化插入运动,减小不确定性。具体的参数设置和优化算法在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
该方法在NIST装配任务板(ATB)和更具挑战性的场景中进行了大量实验验证。实验结果表明,该方法能够有效地推广到不同尺度、形状和材料的各种孔轴装配场景,且无需学习。具体的性能数据和对比基线在摘要中未提及,属于未知信息。但强调了其在实际应用中的鲁棒性。
🎯 应用场景
该研究成果可广泛应用于各种工业自动化场景,尤其是在高精度、小间隙的装配任务中。例如,在电子产品制造、汽车零部件装配、航空航天等领域,可以利用该方法实现鲁棒的自动化装配,提高生产效率和产品质量。此外,该方法还可以应用于机器人辅助手术等领域,提高手术的精度和安全性。
📄 摘要(原文)
Robust and adaptive robotic peg-in-hole assembly under tight tolerances is critical to various industrial applications. However, it remains an open challenge due to perceptual and physical uncertainties from contact-rich interactions that easily exceed the allowed clearance. In this paper, we study how to leverage contact between the peg and its matching hole to eliminate uncertainties in the assembly process under unstructured settings. By examining the role of compliance under contact constraints, we present a manipulation system that plans collision-inclusive interactions for the peg to 1) iteratively identify its task environment to localize the target hole and 2) exploit environmental contact constraints to refine insertion motions into the target hole without relying on precise perception, enabling a robust solution to peg-in-hole assembly. By conceptualizing the above process as the composition of funneling in different state spaces, we present a formal approach to constructing manipulation funnels as an uncertainty-absorbing paradigm for peg-in-hole assembly. The proposed system effectively generalizes across diverse peg-in-hole scenarios across varying scales, shapes, and materials in a learning-free manner. Extensive experiments on a NIST Assembly Task Board (ATB) and additional challenging scenarios validate its robustness in real-world applications.