Learning Aerodynamics for the Control of Flying Humanoid Robots
作者: Antonello Paolino, Gabriele Nava, Fabio Di Natale, Fabio Bergonti, Punith Reddy Vanteddu, Donato Grassi, Luca Riccobene, Alex Zanotti, Renato Tognaccini, Gianluca Iaccarino, Daniele Pucci
分类: cs.RO, cs.LG
发布日期: 2025-05-30 (更新: 2025-06-21)
期刊: Communications Engineering 4, 111 (2025)
DOI: 10.1038/s44172-025-00447-w
💡 一句话要点
针对飞行人形机器人,提出基于学习的空气动力学建模与控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 飞行人形机器人 空气动力学建模 计算流体动力学 风洞实验 机器学习
📋 核心要点
- 飞行人形机器人面临空气动力学建模与控制难题,传统方法难以精确建模复杂气动效应。
- 论文提出一种结合CFD仿真、风洞实验与机器学习的综合方法,用于建模和控制空气动力。
- 通过飞行模拟和物理原型实验验证了所提出方法的有效性,实现了人形机器人的平衡控制。
📝 摘要(中文)
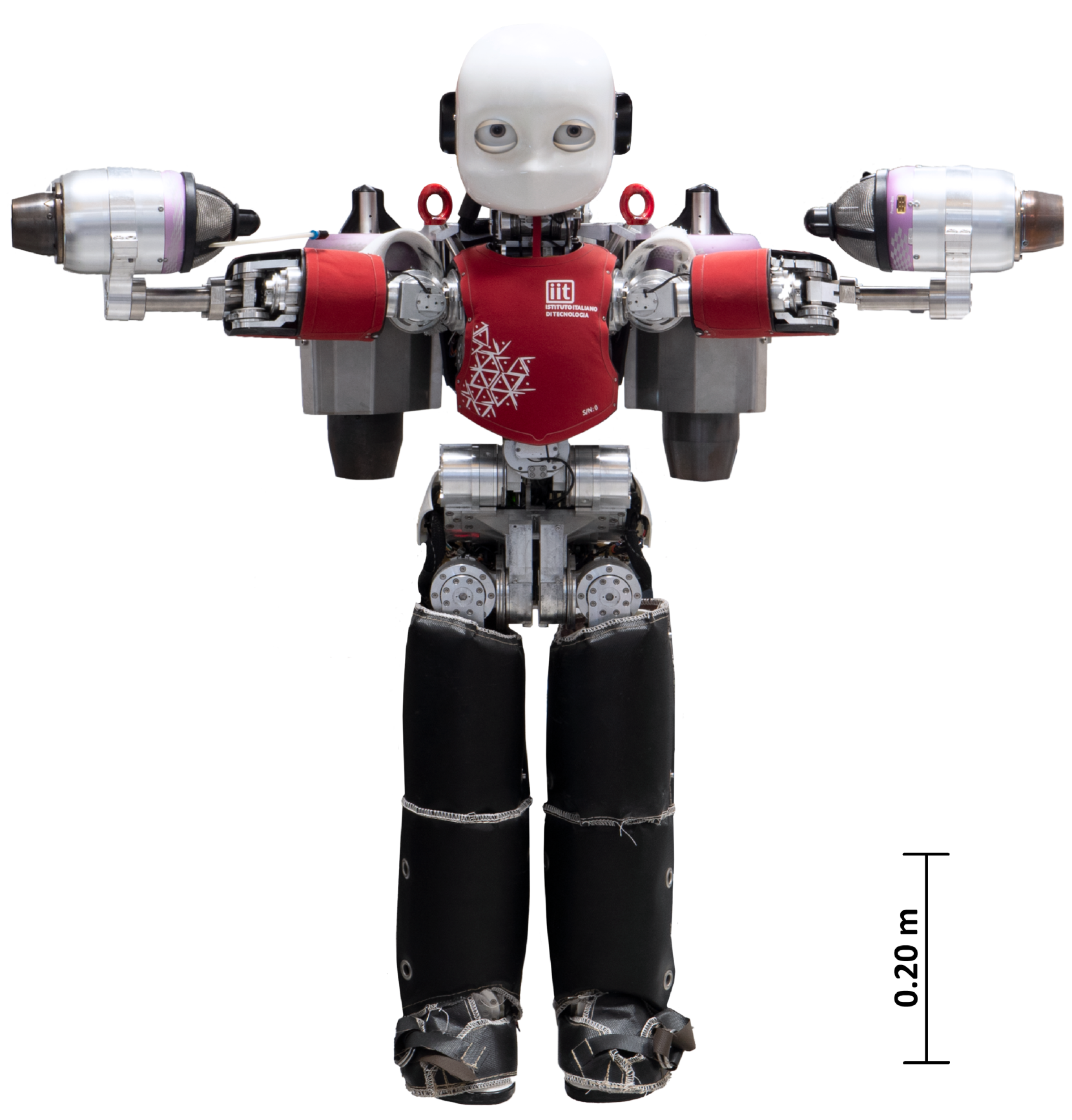
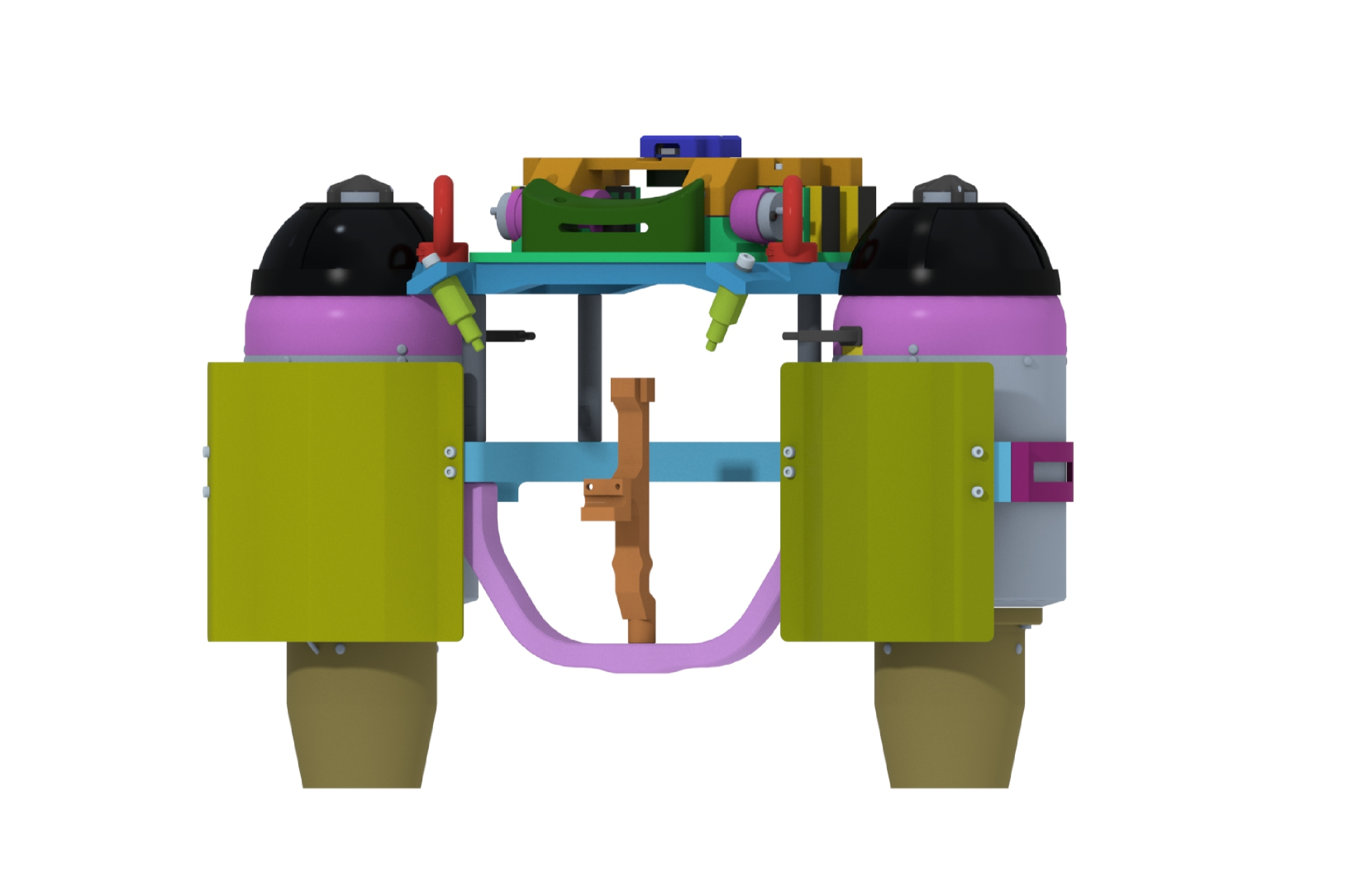
多模态运动机器人因其在多样化环境中的通用性而成为一个活跃的研究领域。在此背景下,额外的驱动可以为人形机器人提供空中能力。飞行人形机器人在建模和控制方面面临挑战,尤其是在空气动力方面。本文从技术和科学的角度解决了这些挑战。技术贡献包括iRonCub-Mk1的机械设计,这是一款喷气动力人形机器人,针对喷气发动机集成进行了优化,以及用于人形机器人风洞实验的硬件修改,以实现精确的空气动力和表面压力测量。科学贡献提供了一种使用经典和学习技术对空气动力进行建模和控制的综合方法。计算流体动力学(CFD)模拟计算了空气动力,并通过iRonCub-Mk1上的风洞实验进行了验证。一个自动化的CFD框架扩展了空气动力数据集,从而能够训练深度神经网络和线性回归模型。这些模型被集成到一个模拟器中,用于设计空气动力学感知控制器,并通过iRonCub-Mk1物理原型上的飞行模拟和平衡实验进行了验证。
🔬 方法详解
问题定义:论文旨在解决飞行人形机器人在空气动力学建模和控制方面面临的挑战。现有方法,如基于简化模型的控制,难以应对复杂的气动效应,导致控制性能下降甚至失败。精确的空气动力学建模对于实现稳定和高效的飞行至关重要。
核心思路:论文的核心思路是结合计算流体动力学(CFD)仿真、风洞实验和机器学习,构建一个精确且高效的空气动力学模型。通过CFD仿真生成大量数据,并利用风洞实验验证仿真结果,然后使用机器学习模型(深度神经网络和线性回归)学习空气动力学特性。这种方法能够捕捉复杂的气动效应,并为控制器设计提供准确的预测。
技术框架:整体框架包括以下几个主要阶段:1) iRonCub-Mk1人形机器人的机械设计和硬件改造,使其适用于喷气发动机集成和风洞实验。2) 使用CFD仿真计算空气动力,并进行风洞实验验证。3) 构建自动化CFD框架,生成大规模空气动力学数据集。4) 使用数据集训练深度神经网络和线性回归模型。5) 将训练好的模型集成到模拟器中,用于设计空气动力学感知控制器。6) 通过飞行模拟和iRonCub-Mk1物理原型上的平衡实验验证控制器的性能。
关键创新:论文的关键创新在于将CFD仿真、风洞实验和机器学习相结合,构建了一个用于飞行人形机器人的综合空气动力学建模和控制框架。与传统的基于简化模型的控制方法相比,该方法能够更准确地捕捉复杂的气动效应,从而提高控制性能。此外,自动化CFD框架的构建也提高了数据生成的效率。
关键设计:论文中涉及的关键设计包括:1) iRonCub-Mk1的机械设计,优化了喷气发动机的集成。2) 用于风洞实验的硬件改造,实现了精确的空气动力和表面压力测量。3) 自动化CFD框架的设计,能够高效地生成大规模数据集。4) 深度神经网络和线性回归模型的选择和训练,用于学习空气动力学特性。具体的网络结构、损失函数和参数设置在论文中可能没有详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
论文通过风洞实验验证了CFD仿真的准确性,并使用训练好的深度神经网络和线性回归模型设计了空气动力学感知控制器。通过飞行模拟和iRonCub-Mk1物理原型上的平衡实验,验证了控制器的有效性。虽然论文中没有给出具体的性能数据和提升幅度,但实验结果表明,所提出的方法能够有效地提高飞行人形机器人的平衡控制能力。
🎯 应用场景
该研究成果可应用于开发更稳定、更灵活的飞行人形机器人,使其能够在复杂环境中执行任务,如搜救、侦察、工业检测等。此外,该方法也可推广到其他类型的飞行机器人,提高其在各种应用场景中的性能和可靠性。未来的研究可以探索更复杂的控制策略和更高效的机器学习模型。
📄 摘要(原文)
Robots with multi-modal locomotion are an active research field due to their versatility in diverse environments. In this context, additional actuation can provide humanoid robots with aerial capabilities. Flying humanoid robots face challenges in modeling and control, particularly with aerodynamic forces. This paper addresses these challenges from a technological and scientific standpoint. The technological contribution includes the mechanical design of iRonCub-Mk1, a jet-powered humanoid robot, optimized for jet engine integration, and hardware modifications for wind tunnel experiments on humanoid robots for precise aerodynamic forces and surface pressure measurements. The scientific contribution offers a comprehensive approach to model and control aerodynamic forces using classical and learning techniques. Computational Fluid Dynamics (CFD) simulations calculate aerodynamic forces, validated through wind tunnel experiments on iRonCub-Mk1. An automated CFD framework expands the aerodynamic dataset, enabling the training of a Deep Neural Network and a linear regression model. These models are integrated into a simulator for designing aerodynamic-aware controllers, validated through flight simulations and balancing experiments on the iRonCub-Mk1 physical prototype.