RoboMoRe: LLM-based Robot Co-design via Joint Optimization of Morphology and Reward
作者: Jiawei Fang, Yuxuan Sun, Chengtian Ma, Qiuyu Lu, Lining Yao
分类: cs.RO, cs.CL
发布日期: 2025-05-30
备注: 30 pages, 13 figures
💡 一句话要点
RoboMoRe:基于LLM的机器人协同设计,联合优化形态与奖励函数
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人协同设计 大型语言模型 奖励塑造 形态优化 机器人学习
📋 核心要点
- 现有机器人协同设计方法依赖固定奖励函数,导致难以探索不同形态的最佳运动模式,易收敛到次优解。
- RoboMoRe利用LLM驱动的框架,通过形态和奖励塑造的联合优化,在协同设计循环中实现更优的机器人设计。
- 实验结果表明,RoboMoRe在多个任务中显著优于人工设计和其他方法,无需特定任务提示或预定义模板。
📝 摘要(中文)
机器人协同设计,即联合优化机器人形态和控制策略,是机器人领域一个长期存在的挑战。尽管已经开发出许多有前景的机器人,但一个关键限制在于其容易收敛到次优设计,这是由于使用了固定的奖励函数,无法探索适合不同形态的各种运动模式。本文提出了RoboMoRe,一个基于大型语言模型(LLM)的框架,它集成了形态和奖励塑造,用于机器人协同设计循环中的协同优化。RoboMoRe执行双阶段优化:在粗略优化阶段,基于LLM的多样性反射机制生成多样且高质量的形态-奖励对,并有效地探索它们的分布。在精细优化阶段,通过交替的LLM引导的奖励和形态梯度更新,迭代地改进最佳候选者。RoboMoRe可以通过奖励塑造来优化高效的机器人形态及其适合的运动行为。结果表明,在没有任何特定于任务的提示或预定义的奖励/形态模板的情况下,RoboMoRe在八个不同的任务中显著优于人工设计的方案和竞争方法。
🔬 方法详解
问题定义:机器人协同设计旨在同时优化机器人的形态和控制策略,以实现特定任务的最佳性能。然而,现有方法通常使用固定的奖励函数,这限制了对不同形态的运动模式的探索,导致设计容易陷入局部最优解。因此,如何设计一种能够自适应地调整奖励函数,从而更好地探索形态空间的方法,是本文要解决的关键问题。
核心思路:RoboMoRe的核心思路是利用大型语言模型(LLM)的强大生成和推理能力,动态地生成和优化奖励函数,从而更好地适应不同的机器人形态。通过LLM引导的奖励塑造,可以鼓励机器人探索更有效的运动模式,并避免陷入次优解。这种方法的核心在于将形态和奖励函数视为一个整体进行优化,而不是孤立地进行设计。
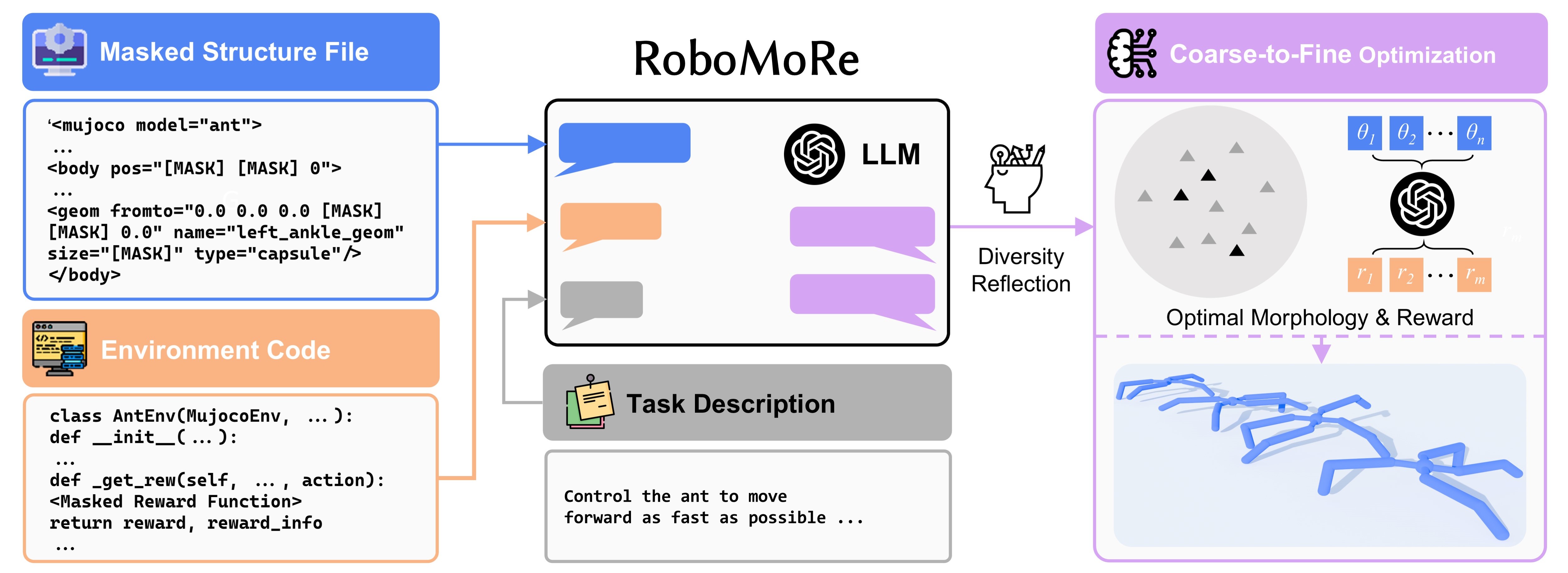
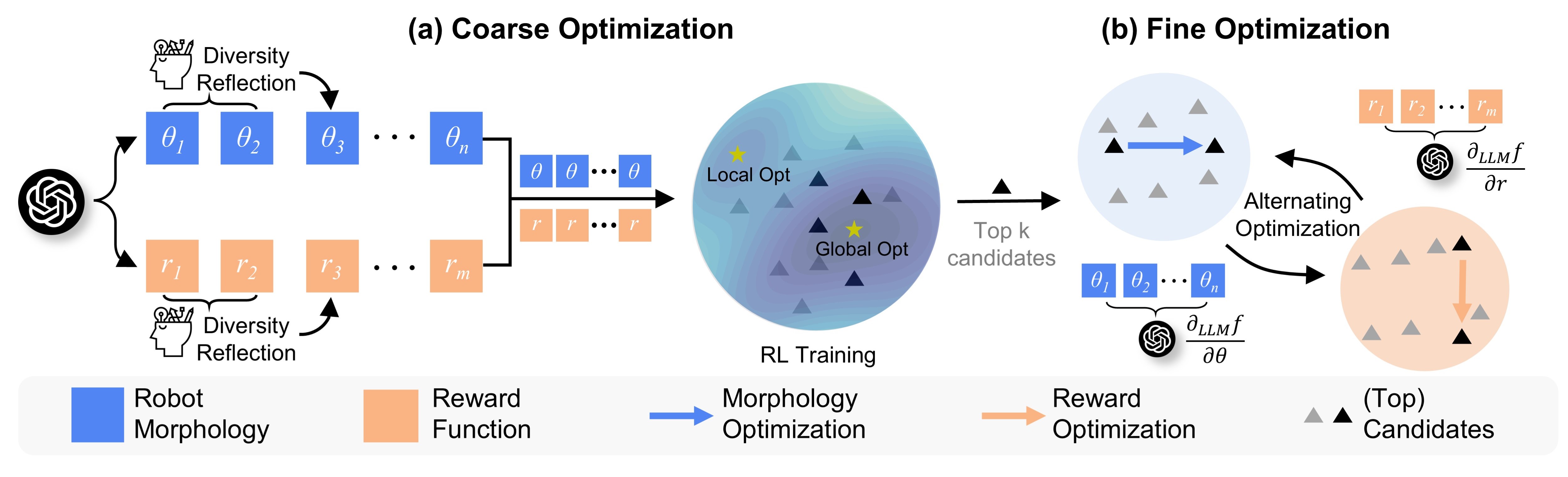
技术框架:RoboMoRe的整体框架包含两个主要阶段:粗略优化阶段和精细优化阶段。在粗略优化阶段,LLM被用于生成多样且高质量的形态-奖励对,从而有效地探索设计空间。LLM通过一个多样性反射机制来确保生成的形态和奖励函数具有足够的多样性。在精细优化阶段,选择粗略优化阶段的最佳候选者,并通过交替的LLM引导的奖励和形态梯度更新来迭代地改进它们。这个过程持续进行,直到达到预定的收敛标准。
关键创新:RoboMoRe的关键创新在于其利用LLM来动态生成和优化奖励函数,从而实现形态和奖励函数的协同优化。与传统的固定奖励函数方法相比,RoboMoRe能够更好地适应不同的机器人形态,并探索更有效的运动模式。此外,RoboMoRe还引入了一个多样性反射机制,以确保生成的形态和奖励函数具有足够的多样性,从而避免陷入局部最优解。
关键设计:RoboMoRe的关键设计包括LLM的提示工程、多样性反射机制以及奖励和形态的梯度更新策略。LLM的提示工程旨在引导LLM生成高质量的形态-奖励对。多样性反射机制通过计算形态和奖励函数之间的距离来确保生成的多样性。奖励和形态的梯度更新策略则用于在精细优化阶段迭代地改进候选者。具体的参数设置和网络结构等技术细节在论文中有详细描述,但具体数值未知。
🖼️ 关键图片

📊 实验亮点
RoboMoRe在八个不同的任务中进行了评估,结果表明其显著优于人工设计的方案和竞争方法。在没有特定任务提示或预定义模板的情况下,RoboMoRe能够自动生成高性能的机器人形态和奖励函数。具体的性能提升幅度在论文中有所展示,但具体数值未知。这些结果表明RoboMoRe是一种有效的机器人协同设计方法。
🎯 应用场景
RoboMoRe具有广泛的应用前景,可用于各种机器人的设计和优化,例如人形机器人、四足机器人、软体机器人等。该方法可以帮助设计者快速生成高性能的机器人,并降低设计成本。此外,RoboMoRe还可以应用于机器人辅助设计、自动化设计等领域,推动机器人技术的进一步发展。未来,该技术有望在工业自动化、医疗康复、灾难救援等领域发挥重要作用。
📄 摘要(原文)
Robot co-design, jointly optimizing morphology and control policy, remains a longstanding challenge in the robotics community, where many promising robots have been developed. However, a key limitation lies in its tendency to converge to sub-optimal designs due to the use of fixed reward functions, which fail to explore the diverse motion modes suitable for different morphologies. Here we propose RoboMoRe, a large language model (LLM)-driven framework that integrates morphology and reward shaping for co-optimization within the robot co-design loop. RoboMoRe performs a dual-stage optimization: in the coarse optimization stage, an LLM-based diversity reflection mechanism generates both diverse and high-quality morphology-reward pairs and efficiently explores their distribution. In the fine optimization stage, top candidates are iteratively refined through alternating LLM-guided reward and morphology gradient updates. RoboMoRe can optimize both efficient robot morphologies and their suited motion behaviors through reward shaping. Results demonstrate that without any task-specific prompting or predefined reward/morphology templates, RoboMoRe significantly outperforms human-engineered designs and competing methods across eight different tasks.