Interactive Imitation Learning for Dexterous Robotic Manipulation: Challenges and Perspectives -- A Survey
作者: Edgar Welte, Rania Rayyes
分类: cs.RO, cs.LG
发布日期: 2025-05-30 (更新: 2025-08-11)
备注: 27 pages, 4 figures, 3 tables
💡 一句话要点
综述:交互式模仿学习在灵巧机器人操作中的挑战与展望
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 灵巧操作 机器人操作 模仿学习 交互式学习 强化学习 人形机器人 人机交互
📋 核心要点
- 现实世界灵巧操作面临高维控制、数据有限和协变量偏移等挑战,传统强化学习和模仿学习方法难以有效应对。
- 交互式模仿学习通过人类反馈主动优化机器人行为,有望提升灵巧操作性能,但目前在该领域的应用仍有待探索。
- 本文综述了现有方法,分析了交互式模仿学习在灵巧操作中的潜力,并指出了未来研究方向和关键挑战。
📝 摘要(中文)
灵巧操作是人形机器人领域一个至关重要但极具挑战性的问题,它需要精确、适应性强和样本高效的学习方法。由于人形机器人通常被设计用于以人为中心的环境中并与日常物品交互,因此掌握灵巧操作对于实际部署至关重要。传统的强化学习和模仿学习方法已经取得了显著进展,但由于现实世界灵巧操作的独特挑战(包括高维控制、有限的训练数据和协变量偏移),它们常常面临困境。本综述全面概述了这些挑战,并回顾了现有的基于学习的现实世界灵巧操作方法,涵盖模仿学习、强化学习和混合方法。交互式模仿学习是一种有前景但尚未充分探索的方向,其中人类反馈在训练期间主动改进机器人的行为。虽然交互式模仿学习已在各种机器人任务中取得成功,但其在灵巧操作中的应用仍然有限。为了弥补这一差距,我们研究了当前应用于其他机器人任务的交互式模仿学习技术,并讨论了如何调整这些方法以增强灵巧操作。通过综合最先进的研究,本文强调了关键挑战,确定了当前方法中的差距,并概述了利用交互式模仿学习来提高灵巧机器人技能的潜在方向。
🔬 方法详解
问题定义:论文旨在解决人形机器人灵巧操作学习中的挑战,特别是现实场景下高维控制、有限数据和协变量偏移等问题。现有方法,如强化学习和模仿学习,在这些挑战面前表现不佳,难以实现高效和鲁棒的灵巧操作。
核心思路:论文的核心思路是探索交互式模仿学习在灵巧操作中的应用潜力。交互式模仿学习通过引入人类反馈,可以在训练过程中主动纠正和优化机器人行为,从而提高学习效率和泛化能力。这种方法旨在弥补传统方法在数据稀缺和环境变化方面的不足。
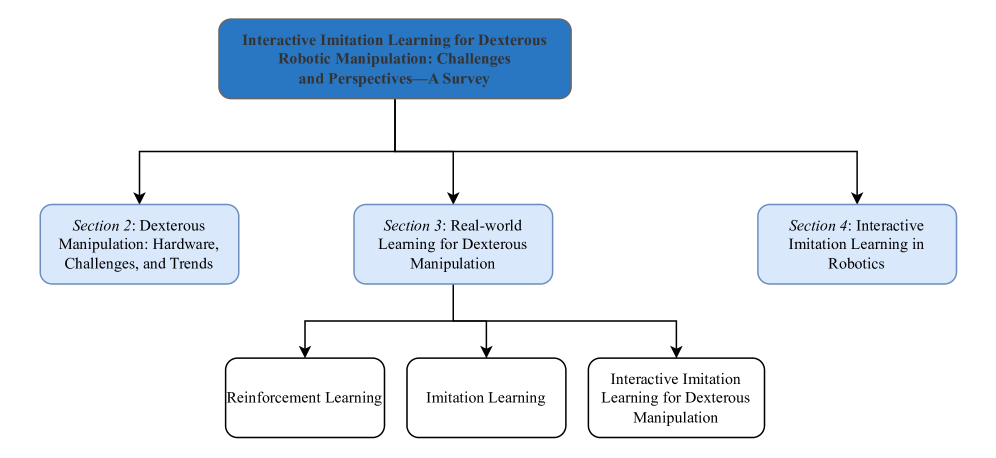
技术框架:论文主要以综述的形式呈现,并未提出新的技术框架。它首先概述了灵巧操作的挑战,然后回顾了现有的模仿学习、强化学习和混合方法。接着,重点分析了交互式模仿学习在其他机器人任务中的应用,并探讨了将其应用于灵巧操作的可能性。最后,论文指出了该领域的研究差距和未来方向。
关键创新:论文的主要创新在于对交互式模仿学习在灵巧操作领域应用前景的关注和分析。虽然交互式模仿学习并非全新概念,但将其与灵巧操作相结合,并系统性地分析其潜在优势和挑战,是本文的亮点。论文强调了人类反馈在提升机器人操作技能中的重要作用。
关键设计:由于是综述文章,没有具体的算法或网络结构设计。论文讨论了如何将已有的交互式模仿学习技术(例如,基于示教的学习、基于评价的学习等)应用于灵巧操作,并分析了不同方法的优缺点。关键在于如何设计有效的反馈机制,以及如何将人类知识融入到机器人学习过程中。
🖼️ 关键图片
📊 实验亮点
该综述重点强调了交互式模仿学习在灵巧操作中的潜力,并分析了现有方法在解决现实世界挑战方面的局限性。尽管没有提供具体的实验结果,但它为未来的研究方向提供了有价值的指导,例如如何设计有效的交互式学习策略,以及如何将人类知识融入到机器人学习过程中,从而提升灵巧操作的性能和鲁棒性。
🎯 应用场景
该研究对人形机器人、智能制造、医疗康复等领域具有潜在应用价值。通过提升机器人的灵巧操作能力,可以使其更好地适应复杂环境,完成精细任务,例如在狭小空间进行装配、辅助医生进行手术等。未来,有望实现更智能、更灵活的机器人系统,更好地服务于人类生活。
📄 摘要(原文)
Dexterous manipulation is a crucial yet highly complex challenge in humanoid robotics, demanding precise, adaptable, and sample-efficient learning methods. As humanoid robots are usually designed to operate in human-centric environments and interact with everyday objects, mastering dexterous manipulation is critical for real-world deployment. Traditional approaches, such as reinforcement learning and imitation learning, have made significant strides, but they often struggle due to the unique challenges of real-world dexterous manipulation, including high-dimensional control, limited training data, and covariate shift. This survey provides a comprehensive overview of these challenges and reviews existing learning-based methods for real-world dexterous manipulation, spanning imitation learning, reinforcement learning, and hybrid approaches. A promising yet underexplored direction is interactive imitation learning, where human feedback actively refines a robots behavior during training. While interactive imitation learning has shown success in various robotic tasks, its application to dexterous manipulation remains limited. To address this gap, we examine current interactive imitation learning techniques applied to other robotic tasks and discuss how these methods can be adapted to enhance dexterous manipulation. By synthesizing state-of-the-art research, this paper highlights key challenges, identifies gaps in current methodologies, and outlines potential directions for leveraging interactive imitation learning to improve dexterous robotic skills.