Reducing Latency in LLM-Based Natural Language Commands Processing for Robot Navigation
作者: Diego Pollini, Bruna V. Guterres, Rodrigo S. Guerra, Ricardo B. Grando
分类: cs.RO, cs.AI
发布日期: 2025-05-29
备注: Accepted to the 23rd IEEE International Conference on Industrial Informatics (INDIN)
💡 一句话要点
针对机器人导航,提出降低LLM自然语言指令处理延迟的集成方案
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人导航 自然语言处理 大型语言模型 ROS 2 人机交互 延迟优化 工业自动化
📋 核心要点
- 现有方法中,大型语言模型应用于机器人控制时,由于模型复杂性,导致指令响应延迟较高,影响实时性。
- 论文提出一种直接将ChatGPT与ROS 2集成的架构,避免使用中间件,从而减少通信开销。
- 实验结果表明,该集成方案平均降低了7.01%的通信延迟,提升了人机交互的效率和可用性。
📝 摘要(中文)
本研究探讨了将大型语言模型(LLM),如GPT,集成到工业机器人中以提高运营效率和人机协作。然而,这些模型的计算复杂性和规模通常导致请求和响应时间的延迟问题。本研究探索了ChatGPT自然语言模型与机器人操作系统ROS 2的集成,旨在减轻交互延迟并改善模拟Gazebo环境中的机器人系统控制。我们提出了一种无需中间件传输平台的集成架构,详细描述了模拟移动机器人如何响应文本和语音命令。实验结果表明,这种集成通过平均降低7.01%的通信延迟,提高了人机交互的执行速度、可用性和可访问性。这些改进有助于更流畅、实时的机器人操作,这对于工业自动化和精确任务至关重要。
🔬 方法详解
问题定义:论文旨在解决将大型语言模型(LLM)应用于机器人导航时,由于LLM的计算复杂性和模型规模带来的指令处理延迟问题。现有方法通常依赖于复杂的中间件进行通信,这进一步增加了延迟,限制了机器人实时响应自然语言指令的能力。
核心思路:论文的核心思路是绕过传统的中间件传输平台,直接将ChatGPT与ROS 2集成。通过优化通信架构,减少不必要的步骤,从而降低整体延迟,提高机器人响应速度。这种设计旨在实现更流畅、更实时的自然语言人机交互。
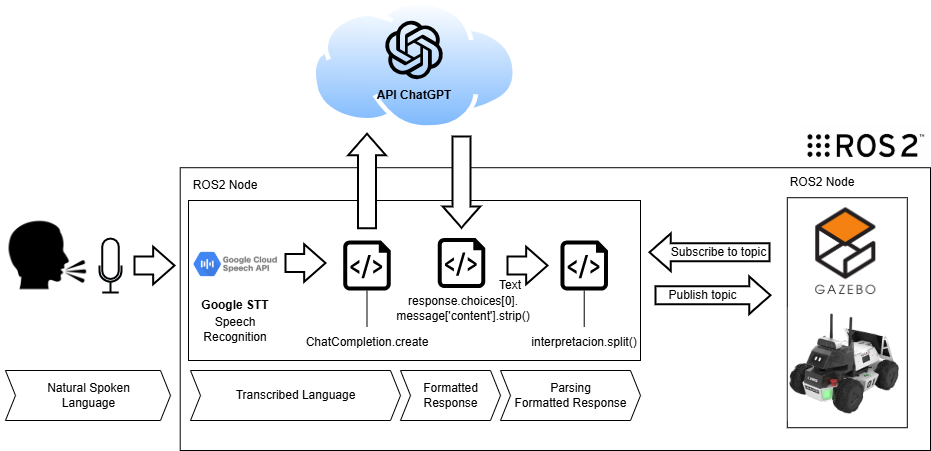
技术框架:该架构包含以下主要模块:1) 自然语言指令输入模块(文本或语音);2) ChatGPT接口模块,负责将自然语言指令转化为机器人可理解的指令;3) ROS 2控制模块,负责接收指令并控制Gazebo模拟环境中的机器人运动。整个流程是:用户输入指令 -> ChatGPT处理 -> ROS 2控制机器人 -> Gazebo模拟环境反馈。
关键创新:该研究的关键创新在于避免了使用中间件传输平台,实现了ChatGPT与ROS 2的直接集成。这种集成方式减少了通信开销,显著降低了指令处理延迟。此外,该架构的设计简洁高效,易于部署和扩展。
关键设计:论文未提供关于ChatGPT的具体参数设置或微调细节,而是侧重于架构层面的优化。关键设计在于ROS 2节点与ChatGPT API的直接通信方式,以及指令解析和执行流程的优化。具体实现细节可能涉及ROS 2的服务或话题机制,以及ChatGPT API的调用方式。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的集成方案能够有效降低通信延迟,平均降低幅度达到7.01%。这一提升显著改善了人机交互的实时性,使得机器人能够更快地响应用户的自然语言指令。虽然论文没有明确对比其他基线方法,但降低延迟的幅度表明了该集成方案的有效性。
🎯 应用场景
该研究成果可应用于工业自动化、服务机器人、智能家居等领域。通过降低自然语言指令处理延迟,可以实现更自然、更高效的人机交互,提升机器人的智能化水平和用户体验。未来,该技术有望推动机器人更广泛地应用于各种复杂环境和任务中,例如灾难救援、医疗辅助等。
📄 摘要(原文)
The integration of Large Language Models (LLMs), such as GPT, in industrial robotics enhances operational efficiency and human-robot collaboration. However, the computational complexity and size of these models often provide latency problems in request and response times. This study explores the integration of the ChatGPT natural language model with the Robot Operating System 2 (ROS 2) to mitigate interaction latency and improve robotic system control within a simulated Gazebo environment. We present an architecture that integrates these technologies without requiring a middleware transport platform, detailing how a simulated mobile robot responds to text and voice commands. Experimental results demonstrate that this integration improves execution speed, usability, and accessibility of the human-robot interaction by decreasing the communication latency by 7.01\% on average. Such improvements facilitate smoother, real-time robot operations, which are crucial for industrial automation and precision tasks.