Humanoid Loco-manipulation Planning based on Graph Search and Reachability Maps
作者: Masaki Murooka, Iori Kumagai, Mitsuharu Morisawa, Fumio Kanehiro, Abderrahmane Kheddar
分类: cs.RO
发布日期: 2025-05-29
期刊: IEEE Robotics and Automation Letters 2021 (Presented at ICRA 2021)
💡 一句话要点
提出基于图搜索和可达性地图的人形机器人Loco-manipulation规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 Loco-manipulation 运动规划 图搜索 可达性地图 步态规划 抓取规划
📋 核心要点
- 人形机器人Loco-manipulation规划面临步态和抓取动作复杂交错的挑战,现有方法难以灵活表示和高效求解。
- 论文提出基于图搜索的Loco-manipulation规划方法,利用可达性地图快速评估状态转移,实现灵活的动作序列规划。
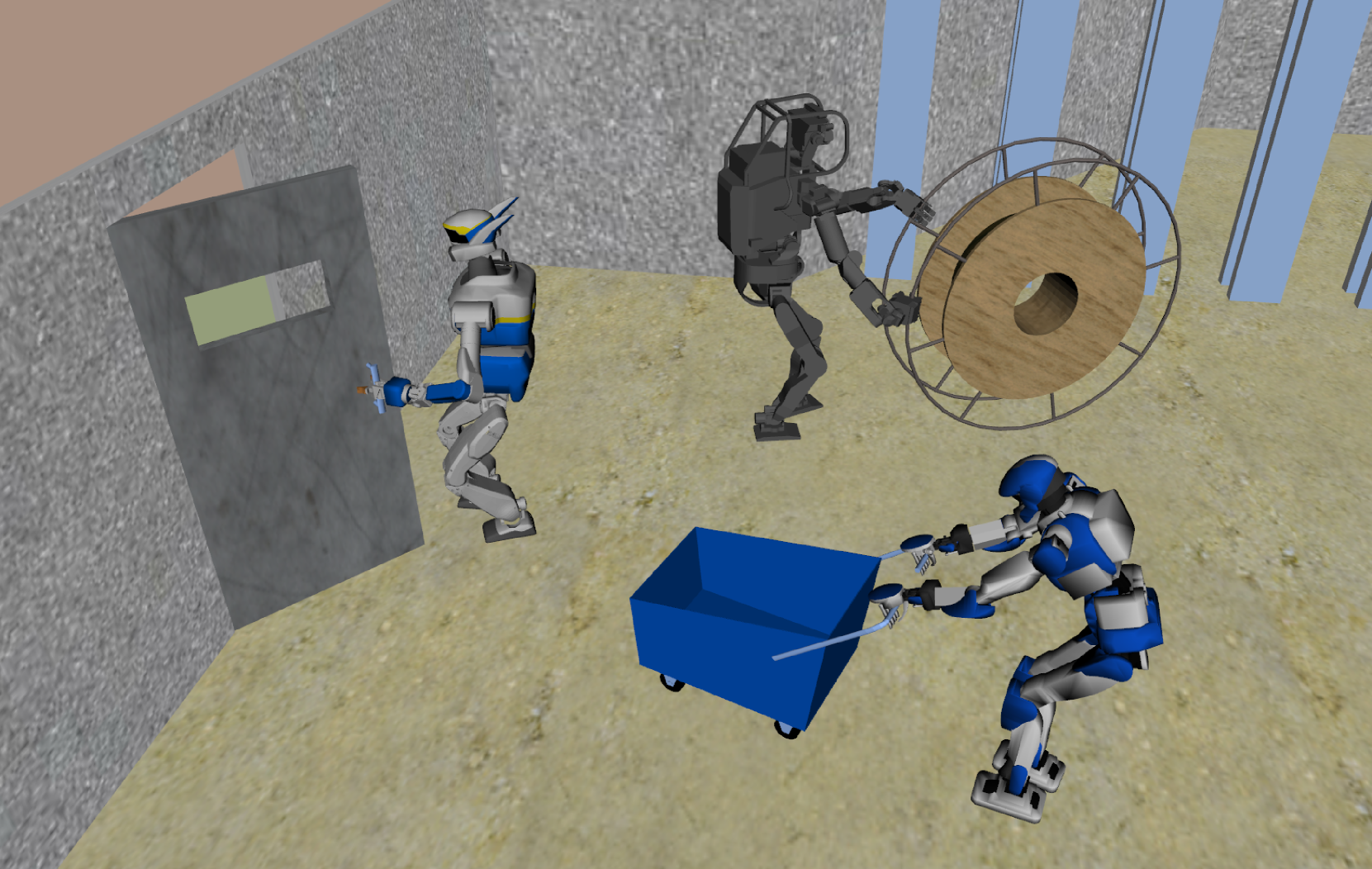
- 实验表明,该方法能够自动规划人形机器人的Loco-manipulation动作,例如卷轴滚动操作中的重新抓取动作。
📝 摘要(中文)
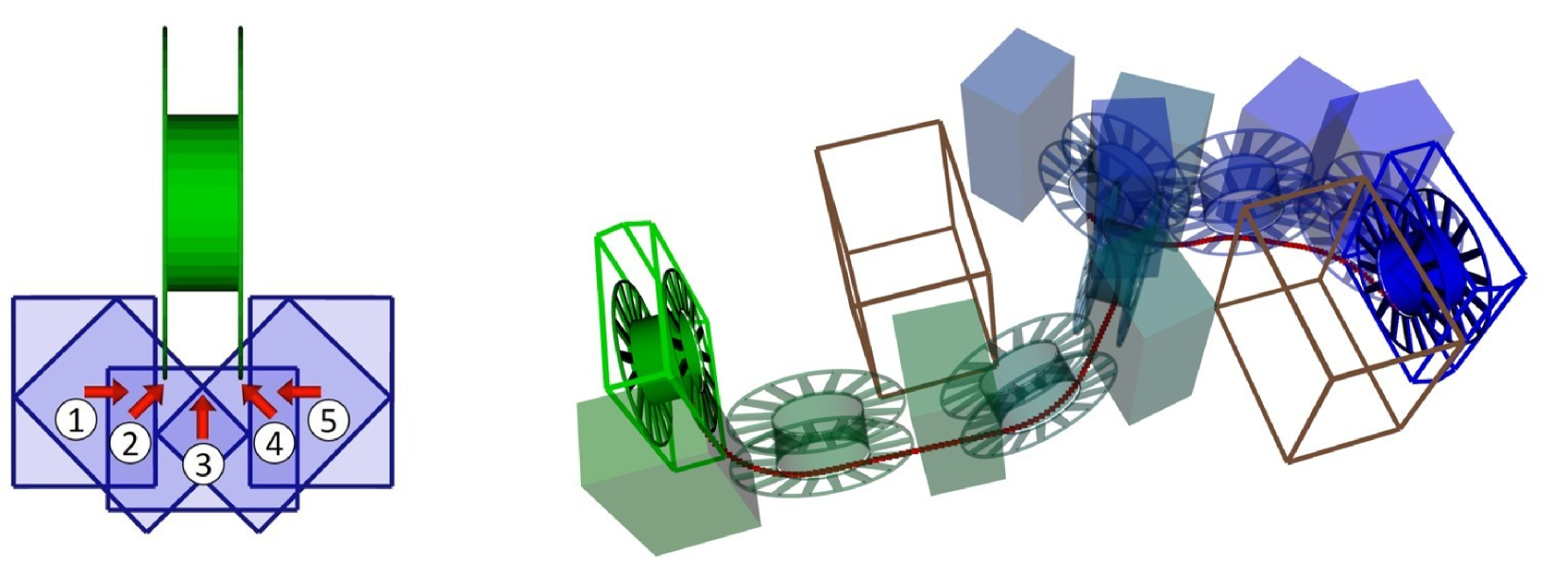
本文提出了一种高效且通用的用于人形机器人的Loco-manipulation规划方法。Loco-manipulation规划是使人形机器人能够自主地通过操纵物体来执行物体运输的关键技术。我们将步态和抓取的交替和排序规划建模为一个图搜索问题,并提出了一个新的转换模型,该模型允许灵活地表示Loco-manipulation。我们的转换模型通过根据机器人和物体的运动重新定位和切换可达性地图来快速评估。我们通过将其应用于Loco-manipulation用例(例如使用重新抓取的卷轴滚动操作)来评估我们的方法,其中运动由我们的框架自动规划。
🔬 方法详解
问题定义:论文旨在解决人形机器人进行Loco-manipulation(移动操作)时的运动规划问题。现有的方法在处理复杂的步态和抓取动作序列时,往往缺乏灵活性和效率,难以应对需要频繁调整姿态和抓取的任务。
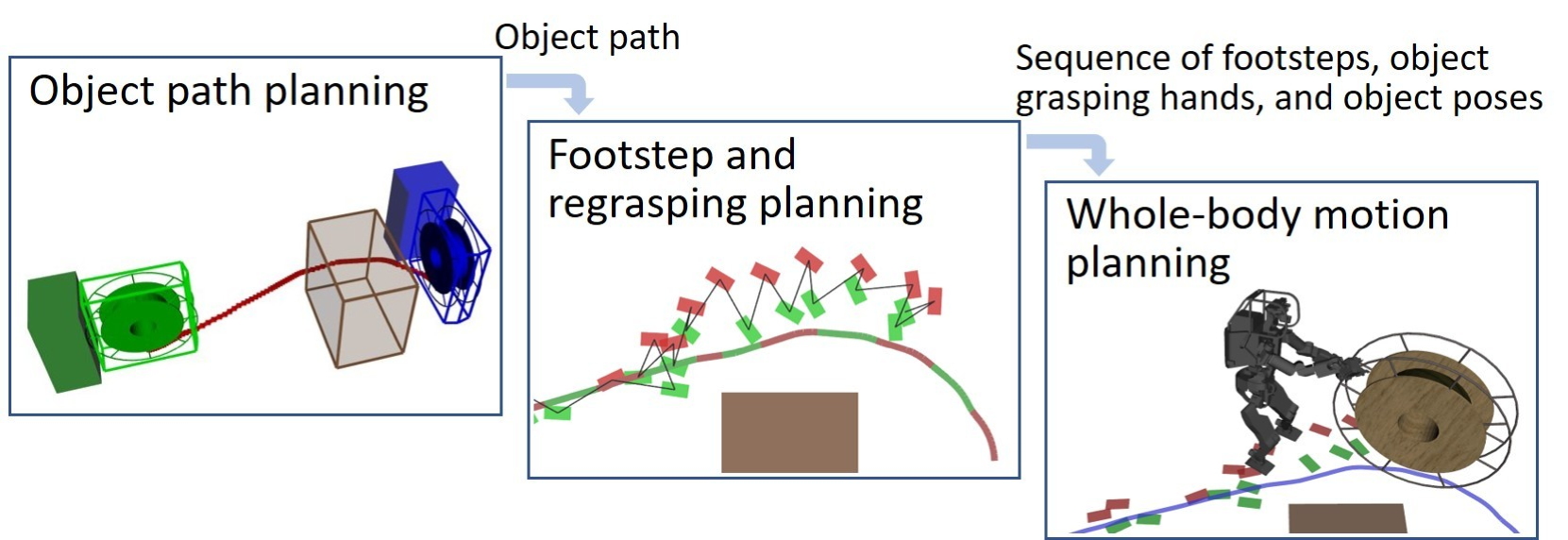
核心思路:论文的核心思路是将Loco-manipulation规划问题建模成一个图搜索问题。图中的节点代表机器人的状态(包括位置、姿态、抓取状态等),边代表状态之间的转移。通过搜索图,找到一条从起始状态到目标状态的最优路径,从而得到Loco-manipulation的动作序列。利用可达性地图来快速评估状态转移的有效性。
技术框架:该方法主要包含以下几个模块: 1. 状态表示:定义机器人的状态空间,包括位置、姿态、关节角度、抓取状态等。 2. 动作空间:定义机器人可以执行的动作,例如行走、转身、抓取、放置等。 3. 状态转移模型:描述执行某个动作后,机器人状态如何变化。该模型是基于可达性地图构建的,可以快速评估状态转移的有效性。 4. 图搜索算法:使用A等图搜索算法,在状态空间中搜索最优的动作序列。 5. 可达性地图*:预先计算机器人不同姿态下的可达空间,用于快速评估抓取和放置动作的可行性。
关键创新:该方法的主要创新在于提出了一个基于可达性地图的快速状态转移模型。与传统的运动学或动力学模型相比,可达性地图可以更高效地评估抓取和放置动作的可行性,从而加速图搜索过程。此外,该方法还允许灵活地表示Loco-manipulation,可以处理复杂的步态和抓取动作序列。
关键设计:可达性地图的构建是关键设计之一。论文中,可达性地图是预先计算的,并存储在数据库中。在图搜索过程中,根据机器人的当前姿态,从数据库中检索相应的可达性地图,用于评估抓取和放置动作的可行性。此外,论文还设计了一种新的转换模型,该模型允许灵活地表示Loco-manipulation,可以处理复杂的步态和抓取动作序列。具体参数设置和损失函数等细节在论文中未明确说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够自动规划人形机器人的Loco-manipulation动作,例如卷轴滚动操作中的重新抓取动作。该方法能够有效地处理复杂的步态和抓取动作序列,并且具有较高的规划效率。具体的性能数据和提升幅度在论文中未明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于人形机器人在复杂环境中的自主操作,例如在仓库中进行货物搬运、在家庭环境中进行物品整理、在灾难现场进行救援等。通过自动规划Loco-manipulation动作,可以提高人形机器人的工作效率和安全性,使其能够更好地服务于人类。
📄 摘要(原文)
In this letter, we propose an efficient and highly versatile loco-manipulation planning for humanoid robots. Loco-manipulation planning is a key technological brick enabling humanoid robots to autonomously perform object transportation by manipulating them. We formulate planning of the alternation and sequencing of footsteps and grasps as a graph search problem with a new transition model that allows for a flexible representation of loco-manipulation. Our transition model is quickly evaluated by relocating and switching the reachability maps depending on the motion of both the robot and object. We evaluate our approach by applying it to loco-manipulation use-cases, such as a bobbin rolling operation with regrasping, where the motion is automatically planned by our framework.