A Constructed Response: Designing and Choreographing Robot Arm Movements in Collaborative Dance Improvisation
作者: Xiaoyu Chang, Fan Zhang, Kexue Fu, Carla Diana, Wendy Ju, Ray LC
分类: cs.RO, cs.HC
发布日期: 2025-05-29
💡 一句话要点
探索人机共舞编排:机器人臂在协作舞蹈即兴创作中的应用
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机协作 舞蹈即兴 机器人手臂 艺术创作 运动设计
📋 核心要点
- 现有舞蹈编排中,人与机器人的协作模式尚不明确,缺乏对非人形机器人运动特性的有效利用。
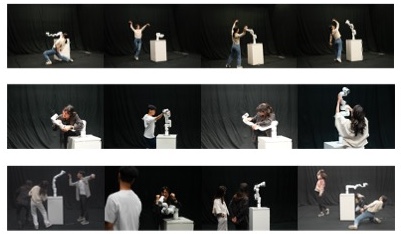
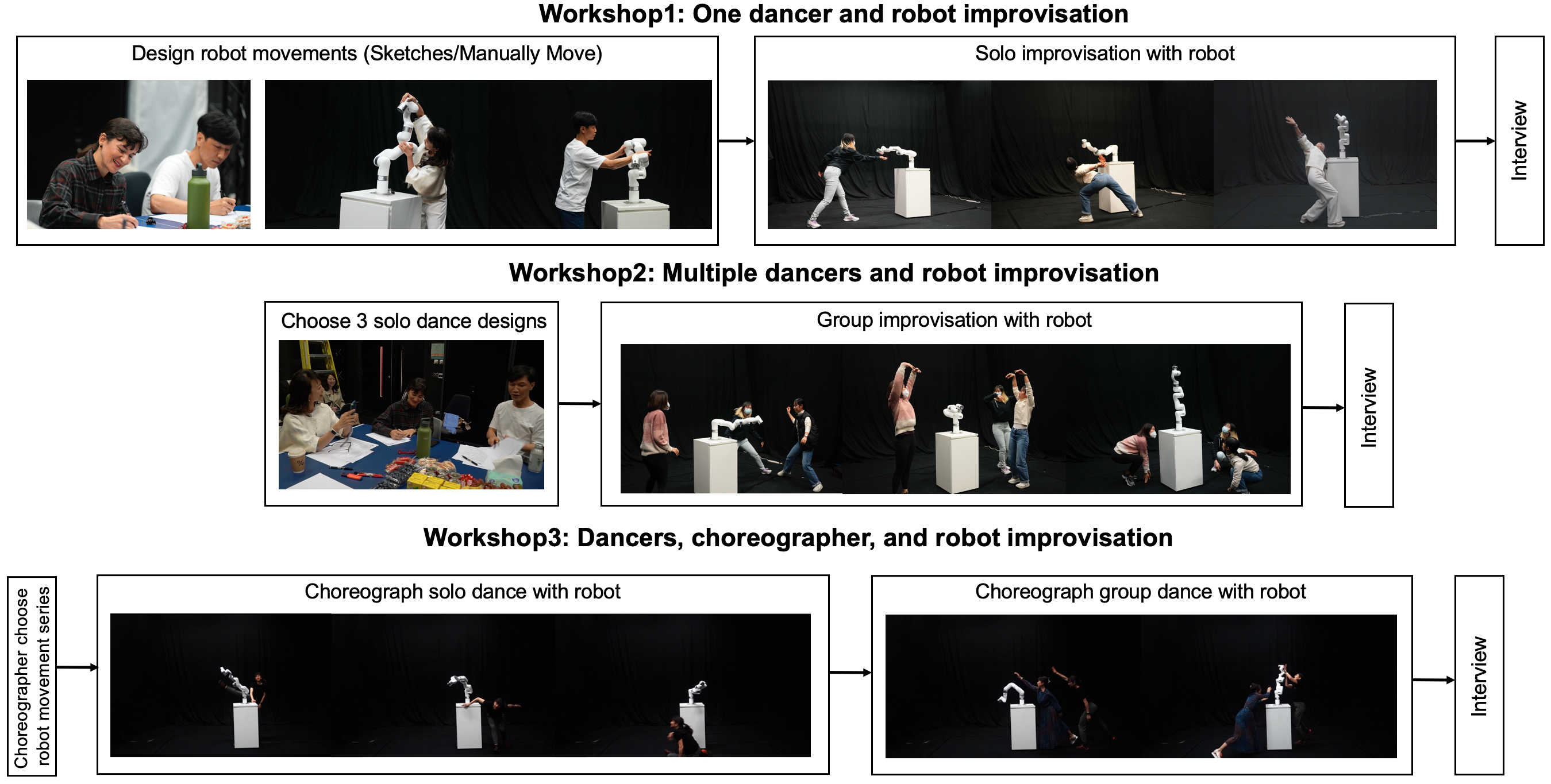
- 该研究通过工作坊形式,探索不同人数的舞者与机器人手臂协作时的动作设计和即兴创作模式。
- 实验发现,单人与机器人协作时,舞者动作更流畅,连接感更强;多人协作时,机器人更像舞台背景。
📝 摘要(中文)
舞蹈家在即兴创作和编舞过程中,经常会进行自我原型设计或与他人合作。当可物理操作的技术被引入到创作过程中时,这些互动会发生怎样的改变?为了理解舞蹈家在使用能够进行非人形运动的工具时如何设计和即兴创作动作,我们让舞蹈家参与工作坊,在单人对单机器人和三人对单机器人的环境中与机器人手臂共同创作动作。我们发现,在单人对单人的场景中,舞蹈家产生了更流畅的动作,体验到与机器人作为共同舞者的更强的连接感和存在感。在三人对单人的场景中,舞蹈家将注意力分散在人类舞者和机器人之间,导致感知到的空间利用率增加和更多的停顿式运动,并将机器人视为舞台背景的一部分。这项工作强调了技术如何驱动运动艺术家的创造力,使其适应与物理工具合作的新方式,从而为支持与非人形代理的艺术合作提供设计见解。
🔬 方法详解
问题定义:论文旨在研究在舞蹈即兴创作和编舞过程中,引入非人形机器人手臂后,舞者与机器人之间的互动模式会发生怎样的变化。现有方法主要集中在人形机器人与人类的互动,缺乏对非人形机器人运动特性在艺术创作中应用的探索,以及对不同人数舞者与机器人协作模式的对比研究。
核心思路:论文的核心思路是通过工作坊的形式,观察和分析舞者在不同人机比例(单人对单机器人,三人对单机器人)下与机器人手臂进行协作时的动作设计和即兴创作过程。通过分析舞者的动作、感知和互动方式,揭示不同协作模式对舞蹈创作的影响,并为未来的人机共舞设计提供指导。
技术框架:该研究采用定性研究方法,主要流程包括: 1. 招募具有舞蹈经验的参与者。 2. 设计工作坊环节,包括单人对单机器人和三人对单机器人两种协作模式。 3. 收集数据,包括视频录像、访谈记录和观察笔记。 4. 分析数据,识别不同协作模式下的动作特征、感知体验和互动模式。
关键创新:该研究的创新点在于: 1. 关注非人形机器人手臂在舞蹈创作中的应用,拓展了人机协作的领域。 2. 对比研究了不同人机比例下的协作模式,揭示了协作模式对舞蹈创作的影响。 3. 从舞者的角度出发,分析了他们在与机器人协作时的感知体验和互动方式,为未来的人机共舞设计提供了新的视角。
关键设计:工作坊中,机器人手臂的运动由预先编程的简单轨迹和舞者的实时控制相结合。舞者可以通过手势或语音指令控制机器人的运动,也可以与机器人手臂进行身体接触。研究人员记录舞者的动作、表情和语言,并进行访谈,了解他们对与机器人协作的感受和体验。没有使用特定的损失函数或网络结构,重点在于观察和分析舞者的行为。
🖼️ 关键图片

📊 实验亮点
研究发现,在单人对单机器人的场景中,舞者能够产生更流畅的动作,并体验到与机器人作为共同舞者的更强的连接感和存在感。而在三人对单机器人的场景中,舞者会将注意力分散在人类舞者和机器人之间,导致感知到的空间利用率增加和更多的停顿式运动,并将机器人视为舞台背景的一部分。这些发现揭示了人机比例对舞蹈创作的影响。
🎯 应用场景
该研究成果可应用于人机共舞表演、舞蹈教学、康复治疗等领域。通过与机器人手臂的协作,舞者可以探索新的动作可能性,拓展舞蹈的创作空间。此外,该研究还可以为其他艺术领域的创作提供借鉴,例如音乐、戏剧等,促进人与机器在艺术领域的深度融合。
📄 摘要(原文)
Dancers often prototype movements themselves or with each other during improvisation and choreography. How are these interactions altered when physically manipulable technologies are introduced into the creative process? To understand how dancers design and improvise movements while working with instruments capable of non-humanoid movements, we engaged dancers in workshops to co-create movements with a robot arm in one-human-to-one-robot and three-human-to-one-robot settings. We found that dancers produced more fluid movements in one-to-one scenarios, experiencing a stronger sense of connection and presence with the robot as a co-dancer. In three-to-one scenarios, the dancers divided their attention between the human dancers and the robot, resulting in increased perceived use of space and more stop-and-go movements, perceiving the robot as part of the stage background. This work highlights how technologies can drive creativity in movement artists adapting to new ways of working with physical instruments, contributing design insights supporting artistic collaborations with non-humanoid agents.