Spring-Brake! Handed Shearing Auxetics Improve Efficiency of Hopping and Standing
作者: Joseph Sullivan, Ian Good, Samuel A. Burden, Jeffrey Ian Lipton
分类: cs.RO, eess.SY
发布日期: 2025-05-28
备注: This work has been submitted to the IEEE for possible publication
💡 一句话要点
利用手性剪切膨胀结构,提升单足跳跃机器人跳跃和站立的能效
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿式机器人 能量效率 手性剪切膨胀结构 柔顺机构 跳跃机器人
📋 核心要点
- 腿式机器人能量效率低是核心问题,传统方法增加弹性元件和制动器导致腿部质量和复杂度上升。
- 论文提出一种新型手性剪切膨胀结构(HSA),同时具备弹簧和制动功能,简化了腿部设计。
- 实验表明,HSA作为并联弹性驱动器,降低了跳跃电能消耗,静态时能以低功耗锁定支撑重物。
📝 摘要(中文)
能量效率对于腿式机器人的成功至关重要。在运动和站立过程中,能量会因浪费而损失。包含弹性元件已被证明可以降低运动成本,而包含制动装置可以降低站立成本。然而,为每个功能添加单独的元件会增加腿的质量和复杂性,从而降低整体系统性能。本文提出了一种新型的柔顺机构,该机构使用手性剪切膨胀结构(HSA),在单足跳跃机器人中充当弹簧和制动器。HSA作为并联弹性驱动器,降低了动态跳跃的电能消耗,并达到了最先进的柔顺跳跃器的效率。HSA的膨胀行为实现了双重功能。在静态任务中,它通过阻止变形,在最小的输入功率下,在大力作用下锁定,产生类似于绞盘机制的高摩擦力。这使得腿能够在没有电机扭矩的情况下支撑重物,从而解决了热效率低下的问题。这种多功能设计增强了动态和静态性能,为机器人应用提供了一种通用的解决方案。
🔬 方法详解
问题定义:腿式机器人在运动和站立时存在能量效率问题。传统的解决方案是分别添加弹性元件和制动器,但这样会增加腿部的质量和复杂性,从而降低整体系统性能。因此,需要一种能够同时实现弹性储能和静态锁定的轻量化、紧凑型机构。
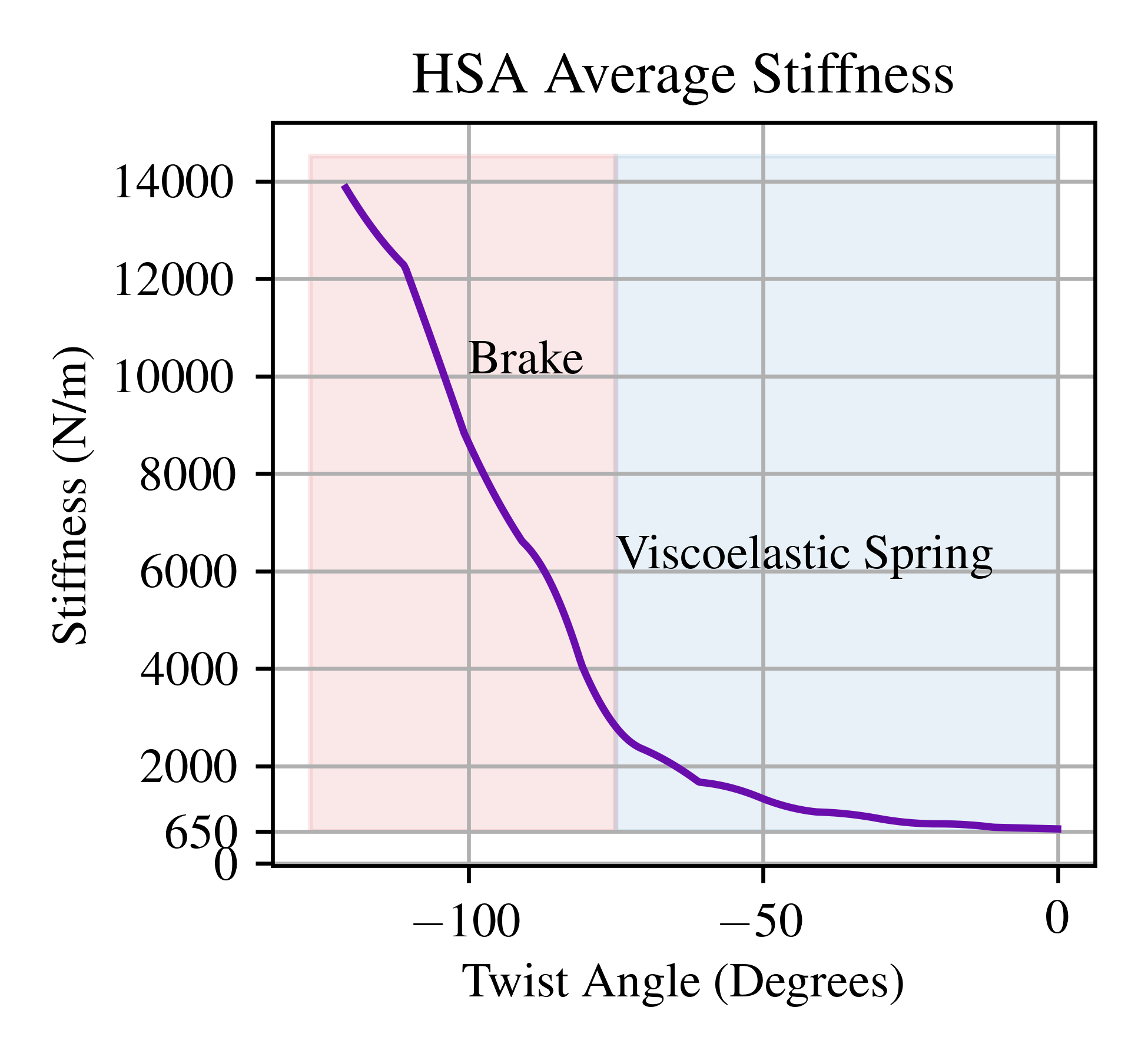
核心思路:论文的核心思路是利用手性剪切膨胀结构(Handed Shearing Auxetic, HSA)的特殊力学性能,使其在动态运动中作为弹性元件储存和释放能量,在静态站立时通过膨胀特性实现高摩擦锁定,从而减少能量消耗。这种双重功能集成在一个结构中,简化了腿部设计。
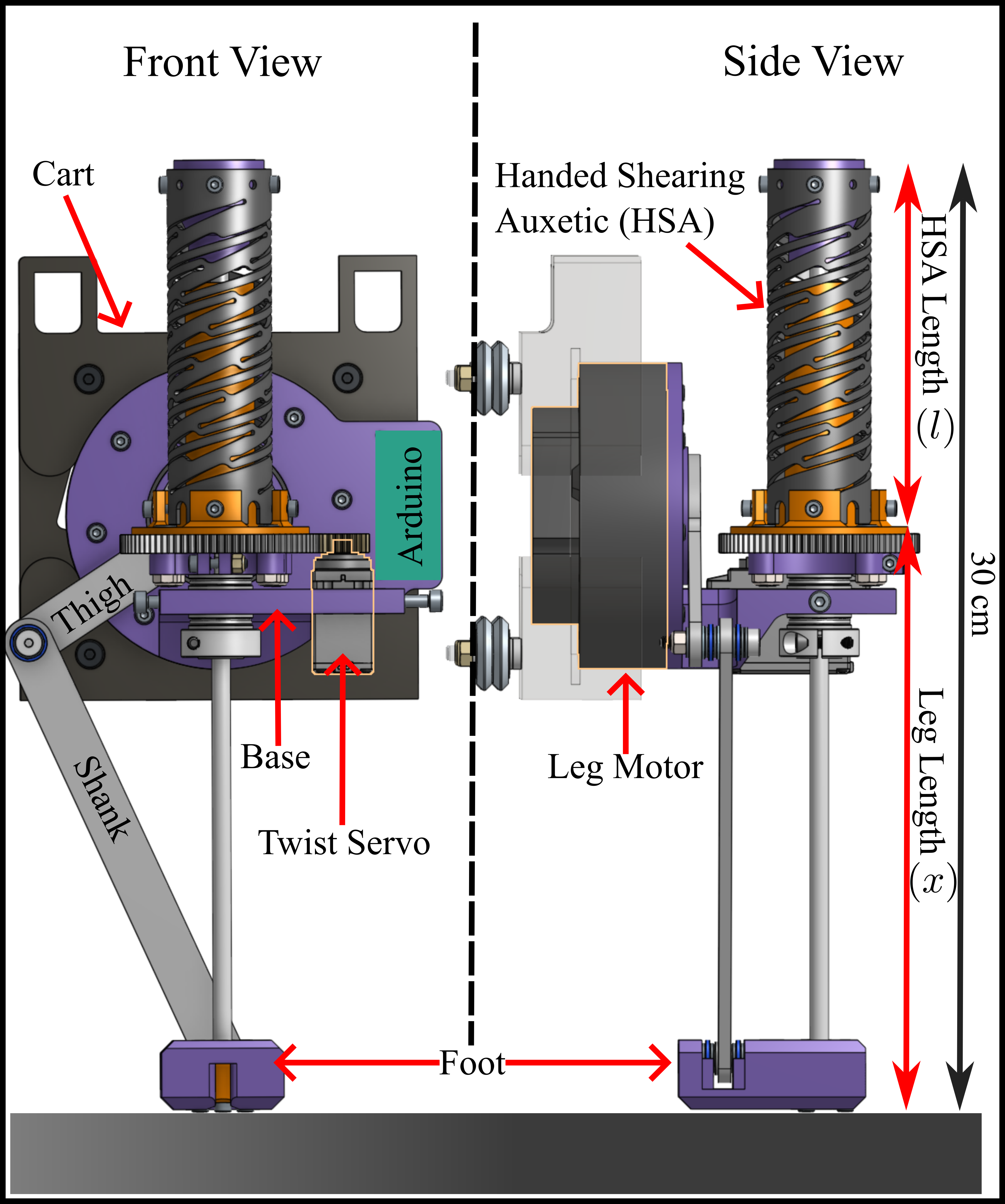
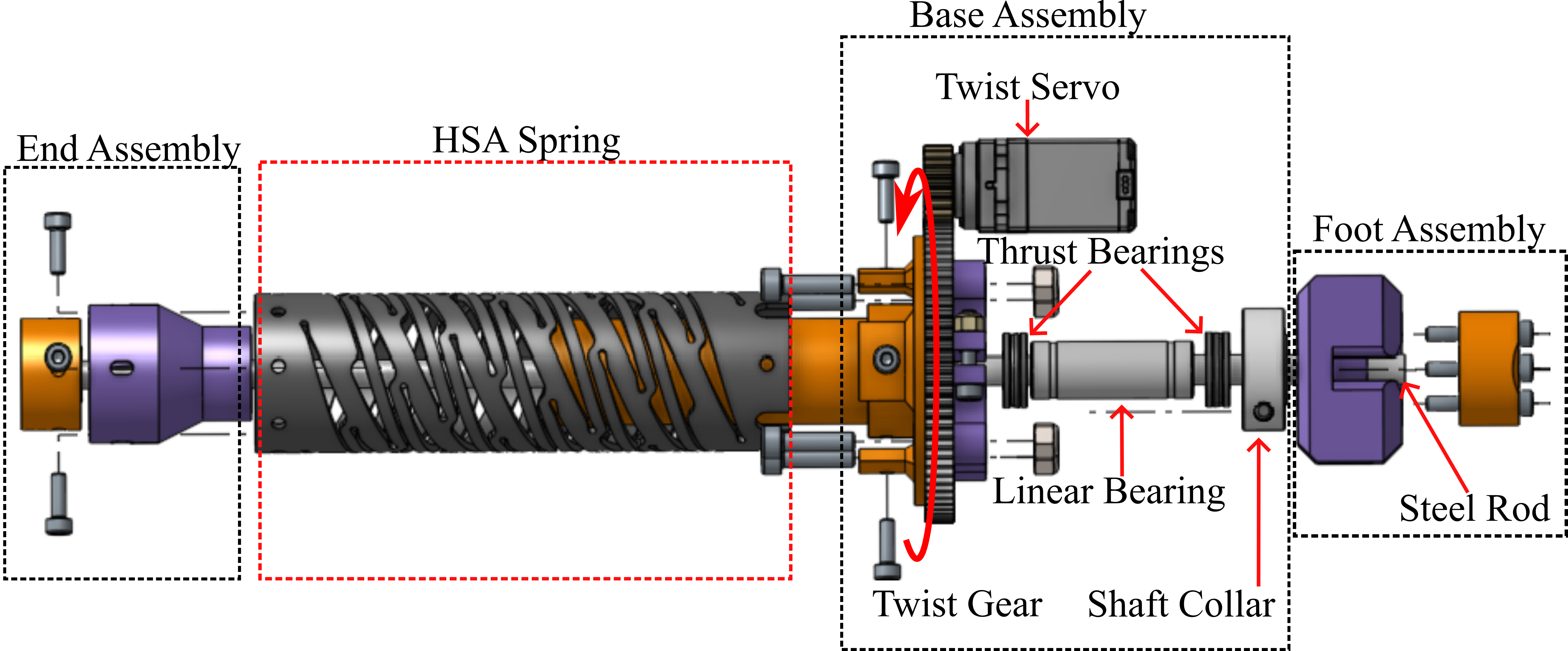
技术框架:该研究主要针对单足跳跃机器人。HSA被集成到腿部结构中,作为并联弹性驱动器。在跳跃过程中,HSA像弹簧一样储存和释放能量,减少电机所需的功率。在站立时,HSA通过膨胀变形产生高摩擦力,锁定腿部,从而无需电机持续提供扭矩来支撑重量。整体流程包括:设计和制造HSA机构,将其集成到单足跳跃机器人中,进行动态跳跃和静态站立实验,测量能量消耗和性能指标。
关键创新:最关键的创新在于将HSA的膨胀特性应用于机器人腿部,使其同时具备弹性储能和静态锁定的功能。与传统的分别使用弹簧和制动器的方法相比,HSA实现了功能的集成,降低了腿部的质量和复杂性。HSA的膨胀特性类似于绞盘机制,可以在低输入功率下产生高摩擦力。
关键设计:HSA的具体几何参数(例如,手性单元的尺寸、连接方式等)需要根据机器人的具体尺寸和性能要求进行优化。材料的选择也很重要,需要兼顾弹性和强度。在控制方面,需要设计合适的控制策略,以协调HSA的变形和电机的运动,实现最佳的能量效率。具体的损失函数和网络结构未知,因为论文重点在于机构设计而非控制算法。
🖼️ 关键图片
📊 实验亮点
实验结果表明,集成了HSA的单足跳跃机器人能够实现与最先进的柔顺跳跃器相当的跳跃效率。更重要的是,在静态站立时,HSA能够以极低的电机功率支撑重物,显著降低了能量消耗。具体的性能数据和对比基线在论文中进行了详细的展示,证明了HSA在动态和静态任务中的优越性能。
🎯 应用场景
该研究成果可应用于各种腿式机器人,例如跳跃机器人、步行机器人和四足机器人。特别是在需要长时间站立或负载较重的应用场景中,HSA的静态锁定功能可以显著降低能量消耗。此外,该技术还可以推广到其他需要集成弹性储能和静态锁定的机械系统中,例如可穿戴设备和外骨骼。
📄 摘要(原文)
Energy efficiency is critical to the success of legged robotics. Efficiency is lost through wasted energy during locomotion and standing. Including elastic elements has been shown to reduce movement costs, while including breaks can reduce standing costs. However, adding separate elements for each increases the mass and complexity of a leg, reducing overall system performance. Here we present a novel compliant mechanism using a Handed Shearing Auxetic (HSA) that acts as a spring and break in a monopod hopping robot. The HSA acts as a parallel elastic actuator, reducing electrical power for dynamic hopping and matching the efficiency of state-of-the-art compliant hoppers. The HSA\u2019s auxetic behavior enables dual functionality. During static tasks, it locks under large forces with minimal input power by blocking deformation, creating high friction similar to a capstan mechanism. This allows the leg to support heavy loads without motor torque, addressing thermal inefficiency. The multi-functional design enhances both dynamic and static performance, offering a versatile solution for robotic applications.