LabUtopia: High-Fidelity Simulation and Hierarchical Benchmark for Scientific Embodied Agents
作者: Rui Li, Zixuan Hu, Wenxi Qu, Jinouwen Zhang, Zhenfei Yin, Sha Zhang, Xuantuo Huang, Hanqing Wang, Tai Wang, Jiangmiao Pang, Wanli Ouyang, Lei Bai, Wangmeng Zuo, Ling-Yu Duan, Dongzhan Zhou, Shixiang Tang
分类: cs.RO, cs.SE
发布日期: 2025-05-28 (更新: 2025-12-07)
备注: Accepted by NeurIPS 2025 Dataset and Benchmark Track
💡 一句话要点
LabUtopia:为科学具身智能体提供高保真模拟与分层基准测试。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 具身智能 模拟器 基准测试 实验室环境 科学智能体
📋 核心要点
- 现有实验室环境下的具身智能体缺乏合适的模拟器和基准测试,限制了其发展。
- LabUtopia通过构建高保真模拟器、可扩展场景生成器和分层基准测试来解决这一问题。
- LabUtopia支持30个任务和200多个资产,为大规模训练和评估提供了平台。
📝 摘要(中文)
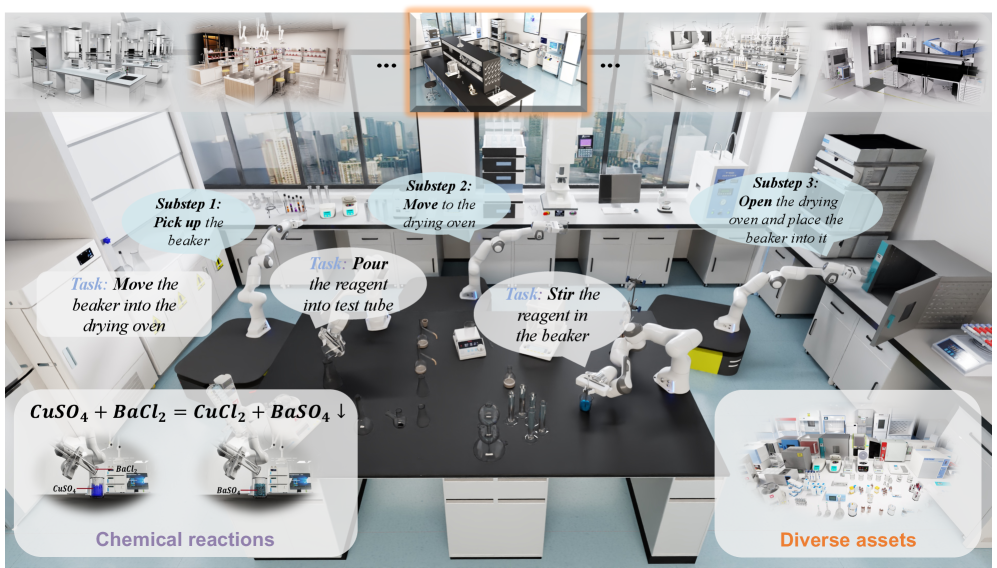
本文提出了LabUtopia,一个综合性的模拟和基准测试套件,旨在促进在实验室环境中开发通用、具备推理能力的具身智能体。LabUtopia集成了LabSim(一个支持多物理场和化学上有意义的交互的高保真模拟器)、LabScene(一个用于生成多样化科学场景的可扩展程序化生成器)和LabBench(一个分层基准,涵盖从原子动作到长程移动操作的五个复杂程度级别)。LabUtopia支持30个不同的任务,包含200多个场景和仪器资产,从而能够在高复杂性环境中进行大规模训练和有原则的评估。实验表明,LabUtopia为推进科学用途智能体中感知、规划和控制的集成提供了一个强大的平台,并为探索具身智能在未来研究中的实际能力和泛化限制提供了一个严格的测试平台。
🔬 方法详解
问题定义:现有方法在实验室环境中开发具身智能体时,面临缺乏合适的模拟器和基准测试的挑战。实验室环境对物理化学变换的感知和长程规划提出了更高的要求,而现有的模拟器和基准测试难以满足这些需求,阻碍了具身智能体在科学领域的应用。
核心思路:LabUtopia的核心思路是构建一个高保真、可扩展且具有分层结构的模拟和基准测试平台,以支持具身智能体在实验室环境中的训练和评估。通过提供逼真的物理化学交互、多样化的场景和不同复杂程度的任务,LabUtopia旨在促进具身智能体在感知、规划和控制方面的发展。
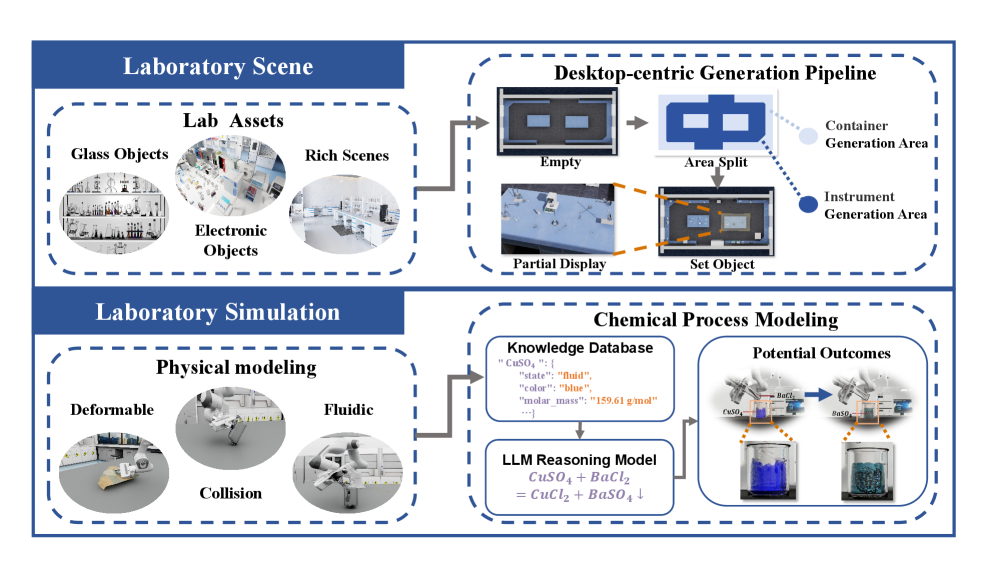
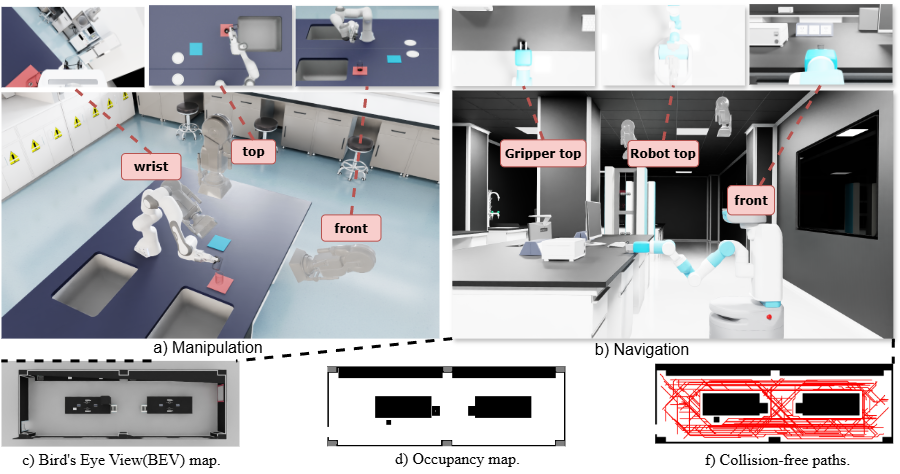
技术框架:LabUtopia包含三个主要组成部分:LabSim、LabScene和LabBench。LabSim是一个高保真模拟器,支持多物理场和化学上有意义的交互。LabScene是一个可扩展的程序化生成器,用于生成多样化的科学场景。LabBench是一个分层基准,涵盖从原子动作到长程移动操作的五个复杂程度级别。这三个组件共同构成了一个完整的模拟和基准测试平台。
关键创新:LabUtopia的关键创新在于其综合性和高保真度。它不仅提供了一个逼真的模拟环境,还提供了一个可扩展的场景生成器和一个分层基准测试。这种综合性的设计使得LabUtopia能够支持具身智能体在实验室环境中进行大规模训练和有原则的评估,从而促进其在感知、规划和控制方面的发展。与现有方法相比,LabUtopia更加注重物理化学交互的模拟和长程规划的评估。
关键设计:LabSim的关键设计在于其对多物理场和化学上有意义的交互的支持。LabScene的关键设计在于其可扩展的程序化生成能力,可以生成多样化的科学场景。LabBench的关键设计在于其分层结构,涵盖从原子动作到长程移动操作的五个复杂程度级别。这些设计使得LabUtopia能够提供一个全面且具有挑战性的测试平台。
🖼️ 关键图片
📊 实验亮点
LabUtopia支持30个不同的任务,包含200多个场景和仪器资产,能够在高复杂性环境中进行大规模训练和有原则的评估。实验结果表明,LabUtopia为推进科学用途智能体中感知、规划和控制的集成提供了一个强大的平台,并为探索具身智能在未来研究中的实际能力和泛化限制提供了一个严格的测试平台。
🎯 应用场景
LabUtopia的应用场景广泛,包括自动化实验流程、药物发现、材料科学研究等。通过使用LabUtopia,研究人员可以训练具身智能体来执行复杂的实验任务,从而提高实验效率和降低实验成本。此外,LabUtopia还可以用于探索新的科学发现,例如通过模拟不同的实验条件来预测材料的性能。
📄 摘要(原文)
Scientific embodied agents play a crucial role in modern laboratories by automating complex experimental workflows. Compared to typical household environments, laboratory settings impose significantly higher demands on perception of physical-chemical transformations and long-horizon planning, making them an ideal testbed for advancing embodied intelligence. However, its development has been long hampered by the lack of suitable simulator and benchmarks. In this paper, we address this gap by introducing LabUtopia, a comprehensive simulation and benchmarking suite designed to facilitate the development of generalizable, reasoning-capable embodied agents in laboratory settings. Specifically, it integrates i) LabSim, a high-fidelity simulator supporting multi-physics and chemically meaningful interactions; ii) LabScene, a scalable procedural generator for diverse scientific scenes; and iii) LabBench, a hierarchical benchmark spanning five levels of complexity from atomic actions to long-horizon mobile manipulation. LabUtopia supports 30 distinct tasks and includes more than 200 scene and instrument assets, enabling large-scale training and principled evaluation in high-complexity environments. We demonstrate that LabUtopia offers a powerful platform for advancing the integration of perception, planning, and control in scientific-purpose agents and provides a rigorous testbed for exploring the practical capabilities and generalization limits of embodied intelligence in future research.