VR-Based Control of Multi-Copter Operation
作者: Jack T. Hughes, Garegin Mazmanyan, Mohammad Ghufran, Hossein Rastgoftar
分类: cs.RO
发布日期: 2025-05-28 (更新: 2025-09-12)
💡 一句话要点
提出基于VR的无人机遥操作系统,提升未知环境下的安全性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机遥操作 虚拟现实 第三人称视角 环境重建 ROS2 Jetson Orin NX
📋 核心要点
- 现有无人机遥操作主要依赖第一人称视角,在复杂未知环境中存在安全隐患,易发生碰撞。
- 该论文提出利用第三人称视角结合实时3D重建,增强操作员对周围环境的感知,从而提升安全性。
- 实验表明,该方法在保持任务完成时间的同时,显著提升了操作员对障碍物的感知,减少了碰撞。
📝 摘要(中文)
本文提出了一种基于VR的多旋翼飞行器遥操作系统,该系统渲染飞行器的第三人称视角(TPV),并实时重建其周围环境的3D模型。该系统运行在嵌入式GPU(Jetson Orin NX)上,集成了ROS2-WebXR,并将几何数据和视频流传输到头显,以实现先前未映射空间中的闭环控制。我们实现了一个第一人称视角(FPV)的基线,并在未映射的室内空间中与两位飞行员进行了匹配试验。报告了一位飞行员重复试验的定量指标(N=8)。TPV实现了与FPV相当的任务时间,同时提高了对近端障碍物的感知(最小障碍物距离+0.20m)并减少了接触。这些结果表明,TPV可以在保持控制质量的同时,暴露FPV中不太明显的危险,从而支持在未知环境中更安全的遥操作。
🔬 方法详解
问题定义:无人机在未知环境下的遥操作,尤其是在室内等复杂环境中,面临着安全挑战。传统的第一人称视角(FPV)虽然提供了沉浸感,但视野受限,难以有效感知周围环境,导致碰撞风险增加。现有方法难以兼顾操作效率和安全性。
核心思路:论文的核心思路是利用第三人称视角(TPV)结合实时3D环境重建,为操作员提供更全面的环境感知。通过VR头显呈现无人机的外部视角和周围环境的3D模型,操作员可以更清晰地了解无人机与障碍物之间的距离和相对位置,从而做出更安全的操作决策。
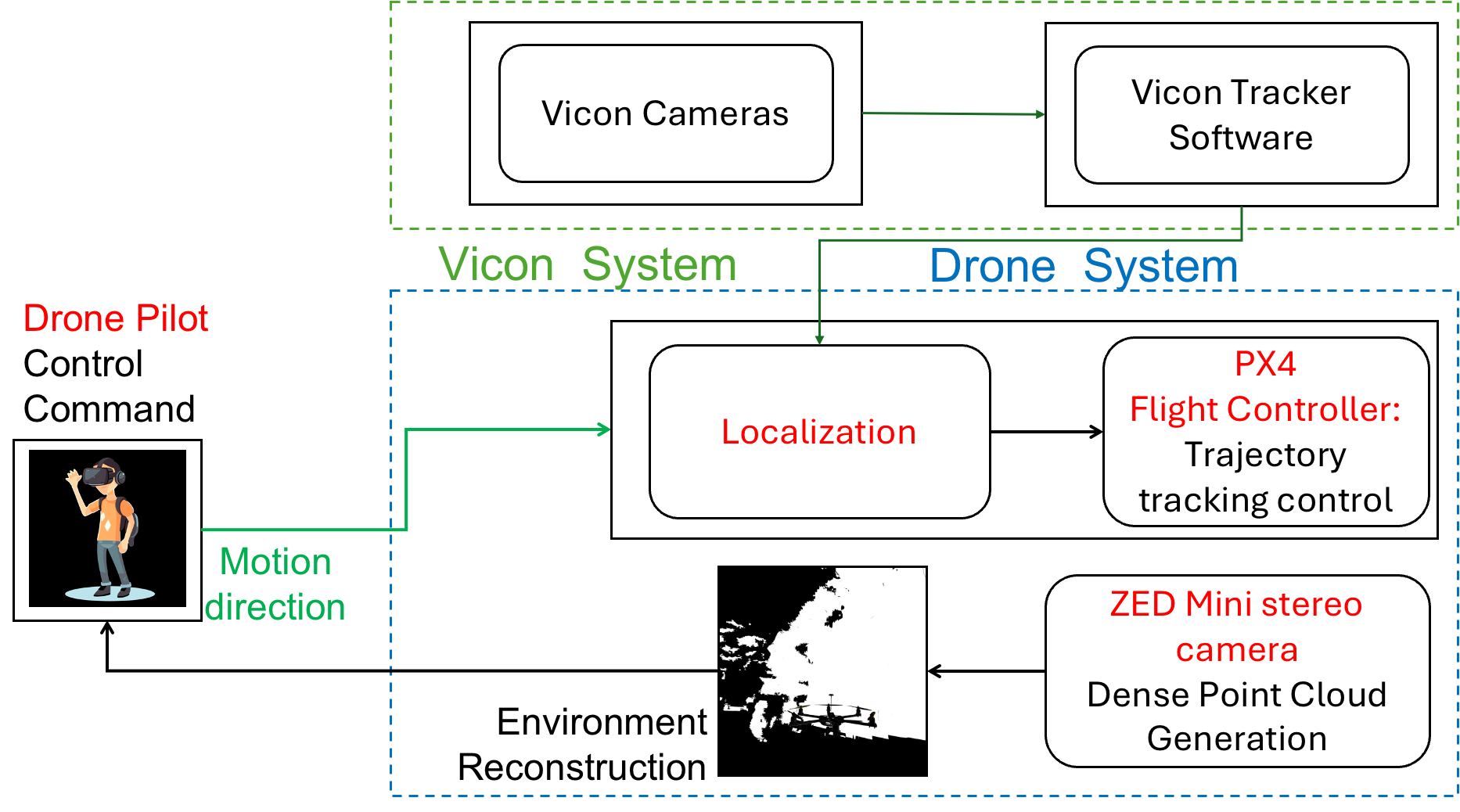
技术框架:该系统主要包含以下几个模块:1) 嵌入式GPU(Jetson Orin NX)上的ROS2节点,负责处理传感器数据和控制指令;2) 基于视觉的3D环境重建模块,利用无人机载摄像头获取的图像数据,实时构建周围环境的3D模型;3) WebXR集成模块,将3D模型和视频流传输到VR头显;4) VR界面,呈现第三人称视角的无人机和周围环境,并允许操作员进行控制。
关键创新:该论文的关键创新在于将第三人称视角和实时3D环境重建相结合,用于无人机遥操作。与传统的FPV相比,TPV提供了更广阔的视野和更清晰的环境感知,从而提高了操作安全性。此外,该系统在嵌入式GPU上运行,实现了低延迟的实时控制。
关键设计:该系统使用Jetson Orin NX作为嵌入式计算平台,保证了实时性和低功耗。ROS2作为机器人操作系统,提供了灵活的模块化架构。WebXR用于将3D内容流式传输到VR头显。具体参数设置和网络结构等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,使用第三人称视角(TPV)的遥操作系统在任务完成时间上与第一人称视角(FPV)相当,同时显著提高了操作员对近端障碍物的感知(最小障碍物距离增加了0.20米),并减少了碰撞次数。这些数据表明,TPV可以在保持控制质量的同时,提高操作安全性。
🎯 应用场景
该研究成果可应用于多种场景,例如:室内巡检、灾难救援、建筑工地监控等。在这些场景中,无人机需要在复杂、未知的环境中飞行,操作员需要清晰地了解周围环境才能安全地完成任务。该系统可以显著提高这些任务的安全性,并降低操作难度,具有重要的实际应用价值。
📄 摘要(原文)
We present a VR-based teleoperation system for multirotor flight that renders a third-person view (TPV) of the vehicle together with a live 3D reconstruction of its surroundings. The system runs on an embedded GPU (Jetson Orin NX) with ROS2-WebXR integration and streams geometry and video to a headset for closed-loop control in previously unmapped spaces. We implement a first-person video (FPV) baseline and perform matched trials with two pilots in unmapped indoor spaces. Quantitative metrics are reported from repeated trials with one pilot (N=8). TPV achieved task time comparable to FPV while improving proximal obstacle awareness (minimum obstacle distance +0.20m) and reducing contacts. These results indicate that TPV can preserve control quality while exposing hazards less visible in FPV, supporting safer teleoperation in unknown environments.